2. Automaatjuhtimise komponendid ja tüübid I osa
- 2.0. Juhtimissüsteemide põhikomponendid
- Andurid
- 2.1. Sissejuhatus Andurite ja mõõteseadmete tehnoloogiasse
- 2.3. Temperatuuriandurid
- 2.4. Jõu- ja mehaanilise pinge andurid
- 2.5. Rõhuandurid
- 2.6. Positsiooni-, nihke-, kiirus- ja kiirendusandurid
- 2.7. Vooluhulga andurid
- 2.8. Niiskusandurid
- 2.9. Objekti registreerivad andurid
- 2.10. Gaasiandurid
- 3. Andurite ja Mõõteseadmete Kalibreerimine ja Täpsus
- 4. Andurite ja Mõõteseadmete Rakendused
- 2.1. Sissejuhatus Andurite ja mõõteseadmete tehnoloogiasse
- Kontrollerid ja regulaatorid
2.0. Juhtimissüsteemide põhikomponendid
Andurid
2.1. Sissejuhatus Andurite ja mõõteseadmete tehnoloogiasse
Andurid ja mõõteseadmed moodustavad iga juhtimissüsteemi tuuma, võimaldades täpset andmete kogumist ja protsesside jälgimist. Neid kasutatakse laialdaselt erinevates tööstusharudes, sealhulgas automaatikas, meditsiinis, energeetikas ja keskkonnaseires. Selle materjali eesmärk on pakkuda põhjalikku ülevaadet andurite tööpõhimõtetest, nende tüüpidest, kasutusvaldkondadest ning mõõteseadmete olulisusest.
2.2. Andurid: Põhitüübid ja Tööprintsiibid
ANDURITE KLASSIFIKATSIOON
Andmetöötlustehnoloogia ning info- ja arvutitehnika kiire areng määravad andurite intensiivse arendamise. Kaasaegsed mõõte- ja juhtimissüsteemid põhinevad arvutitehnikal. Kuna nende süsteemide võimalused kasvavad, siis infot esmaselt vastuvõtvate andurite roll tõuseb oluliselt. Andurid muutuvad oluliseks teguriks automaatikas ja robootikas ning nad koguvad suurt tähtsust süsteemide struktuurielementidena.
Andurid on üldiselt seadmed, mis muundavad füüsilised või keemilised suurused mugavalt kasutatavateks elektrisignaalideks. Rahvusvahelise Elektrotehnika Komitee (IEC) poolt antud anduri definitsioon: andur on mõõteahela esmane osa, mis muundab sisendmuutuja mõõdetavaks signaaliks.
Andurid on andurisüsteemide osaks ja nad on esimesed elemendid, mille ülesandeks on esitada mõõdetavat infot. Andurisüsteemi üldine plokkskeem on joonisel 1.1.

Joonis 1.1 andursüsteemi tööpõhimõte [60]
Andurisse sisenev signaal on tavaliselt väikese amplituudiga ja segatud interfereerunud signaalide ja müraga. Täiendavalt võib osutuda vajalikuks signaali lineariseerimine. Järgnevaks töötlemiseks optimaalsete omadustega signaali formeerimine teostatakse normaliseerimisahelaga, mis võib koosneda võimendist, filtrist ja teistest analoogahelatest. Mõnel juhul need ahelad on andurelemendi vahetus läheduses. Seejärel formeeritud analoogsignaal muundatakse digitaalseks ja edastatakse mikrokontrollerile.
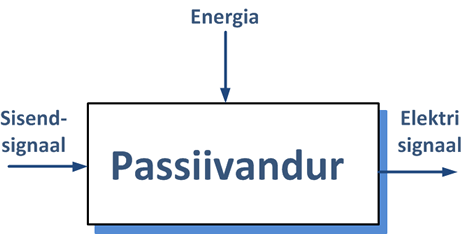
Andurisüsteemi omadused on suurel määral määratud anduriga. See muundab energia ühest liigist teise. Andureid on kahte põhitüüpi: aktiivsed ja passiivsed. Aktiivandur muundab ühte liiki energia teiseks ilma välise energiaallikata või ergutuseta (Joonis 1.2.,a).

a
b
Joonis 1.2 Andurite tüübid
Passiivandur ei saa energiat vahetult muundada, kuid ta juhib ergutusenergiat, mis tuleb teisest allikast (Joonis 1.2.,b).
Anduri funktsioonide teostamiseks kasutatakse erinevaid füüsikalisi efekte ja tööpõhimõtteid. Andur võib olla mõõdetava suurusega kontaktis või olla kontaktivaba. Tööpõhimõtete ja efektide mitmekesisus laieneb pidevalt ja parandatakse neid kasutavaid protsesse.
Anduritele on püstitatud kindlad nõudmised. Mõned neist on üldised, mis puudutavad kõiki andurite tüüpe ja mõned erinõudmised puudutavad teatud kindlat tüüpi andureid. Erinevatel tööpõhimõttest ja anduri ehitusest sõltuvatel viisidel tagatavad peamised nõudmised on:
- kõrge tundlikkus;
- lineaarsus;
- suur täpsus;
- hüstereesi puudumine:
- korratavus;
- kiire reaktsioon;
- selektiivsus;
- vahetatavus;
- lai mõõtevahemik;
- lai talitlustemperatuuri vahemik;
- stabiilsus häiringutele (mürakindlus);
- lihtne korrigeerimine (lihtne kalibreerimine);
- suur töökindlus;
- pikk eluiga;
- vananemiskindlus;
- vastupanu keskkonnamõjudele (temperatuur, vibratsioon, vesi, tolm jne);
- ohutus (andurid ei tohi tekitada mingit kahju);
- odavus;
- väikesed mõõtmed, väike kaal ja tugevus.
Klassifitseerimise põhimõtted
Andureid võib klassifitseerida muunduspõhimõtte – (füüsikalised või keemilised nähtused, mille alusel nad talitlevad), eesmärgi, väljundsignaalide tüübi, materjalide ja tootmisprotsessi alusel. Andurite klassifikatsioon nende muunduspõhimõtete alusel on näidatud joonisel 1.3. Need on jaotatud füüsikalisteks ja keemilisteks.
Füüsikalised andurid on need, milles füüsikalise nähtuse nagu piesoelektrilised, magnetostriktiivsed, ioniseerivad, termoelektrilised, fotoelektrilised, magnetelektrilised jne mõõdetava suuruse muutused muundatakse elektrisignaalideks.
Joonis 1.3 Andurite klassifikatsioon
Keemilised andurid on need, milles mõõdetava suuruse muutused muundatakse elektrisignaalideks keemilise imendumise, elektrokeemilise reaktsiooni jne tulemusena.
On andureid, mida ei saa üheselt liigitada ei füüsikalisteks ega keemilisteks.
Mõnede andurite tööpõhimõtted ja võimalikud rakendused on näidatud tabelis 1.1.
Tabel 1.1
| Anduri tüüp | Tööpõhimõte | Mõõdetav mitte-elektriline suurus |
|---|---|---|
| TensoandurTermistor (NTC, PTC)Pooljuhtandur | Muutused takistuses | Jõud, mass, rõhk, kiirendus, paisumine, tase, temperatuur, niiskus, gaas |
| Mahtuvusandur | Muutused mahtuvuses | Jõud, mass, rõhk, kiirendus, tase, niiskus |
| Induktiivandur | Muutused induktiivsuses | Jõud, mass, rõhk, kiirendus, pöörete arv, pöördemoment, magnetväli |
| Halli andur | Halli efekt | Nurk, pöörete arv, jõud, magnetväli |
| Piesoelektriline andurUltraheliandur | Piesoelektriline efekt | Rõhk, jõud, kiirendus, vahemaa |
| Piesoelektriline andur | Piesoelektriline efekt | Suits, tuli, soojuse jaotus |
| Optoelektroonilised andurid | Optoelektroonilised efektid | Kiirgus, nurk, pöörete arv, nihe, moment |
Vastavalt eesmärgile jaotatakse andurid:
- rõhu- ja jõuanduriteks;
- tasemeanduriteks;
- kiirusanduriteks;
- kiirendusanduriteks;
- vibratsioonianduriteks;
- magnetvälja anduriteks;
- vaakumanduriteks;
- nihkeanduriteks;
- tarbimise anduriteks;
- temperatuurianduriteks;
- radioaktiivse kiirguse anduriteks;
- niiskusanduriteks:
- gaasianduriteks;
- bioanduriteks jne.
Sõltuvalt väljundsignaali tüübist jaotatakse andurid:
- analoogandurid – muundavad mõõdetavad mitte-elektrilised suurused analoog-elektrisignaalideks;
- digitaalandurid – muundavad mõõdetavad mitte-elektrilised muutujad digitaalseteks väljundsignaalideks (vahetu või kaudne muundamine);
- pseudodigitaalsed andurid – muundavad mõõdetavad muutujad sageduseks või ajaintervalliks (vahetu või kaudne muundamine);
- lülitusandurid – reageerivad mõõdetava suuruse läviväärtuse (piirväärtuse) ületamisele ja lülitavad väljundsignaali madalale või kõrgele tasemele.
Kõik materjalid- reageerivad iseloomulikult välismõjudele. Välismõjudele kõige tundlikumaid materjale, s. t. neil on funktsionaalsed omadused, kasutatakse andurite tundlike elementidena.
Kasutatavate materjalide aluselgrupeeritakse andurid:
sõltuvalt kasutatavast materjalist:
- metall;
- keraamika;
- polümeer;
- komposiitmaterjalid.
sõltuvalt materjali füüsikalistest omadustest:
- elektrijuhid;
- pooljuhid;
- dielektrikud;
- magnetmaterjalid.
sõltuvalt materjali kristallistruktuurist:
- kristall;
- polükristall;
- amorfne.
Sõltuvalt tootmisprotsessist jaotatakse andurid:
- integraalsed andurid;
- kelmeandurid;
- paksukelmeandurid;
- keraamilised andurid.
AnduriTE jaotus Tööprintsiibi järgi
Termilised andurid
- Termopaarid: Termopaarid koosnevad kahest erinevast metallist, mis on ühendatud. Kui ühenduspunkti temperatuur muutub, tekib nendes metallides pinge, mida kasutatakse temperatuuri mõõtmiseks. Termopaare kasutatakse laialdaselt kõrgetel temperatuuridel, näiteks ahjudes ja mootorites.
- Takistustermomeetrid (RTD): RTD-d mõõdavad takistuse muutust sõltuvalt temperatuurist. RTD-sid peetakse väga täpseks ja usaldusväärseks, eriti madalamate temperatuuride puhul.
Rõhuandurid
- Manomeetrid: Manomeetrid on traditsioonilised rõhu mõõteseadmed, mis kasutavad vedeliku või gaasi rõhu määramiseks näiteks u-torus oleva vedeliku kõrguse muutust. Need on lihtsad, kuid efektiivsed seadmed rõhu määramiseks.
- Piezoelektrilised andurid: Need andurid kasutavad pinge genereerimiseks kristallides tekkivat piezoelektrilist efekti. Neid kasutatakse sageli kiirete rõhumuutuste mõõtmiseks, näiteks lööklaine analüüsis.
2Niiskusandurid
- Kondensatsiooniandurid: Need andurid määravad õhu niiskusesisalduse, mõõtes kondenseeruva vee hulka. Need on tavaliselt täpsed, kuid nende kasutamine võib olla piiratud kondensatsioonitingimustes.
- Kapasitiivsed niiskusandurid: Kapasitiivsed niiskusandurid kasutavad niiskuse määramiseks kondensaatori mahtuvuse muutust. Need on tavalised üldkasutatavad niiskusandurid, eriti tööstuses ja hooneautomaatikas.
Pinge ja vooluandurid
- Shunt-andurid: Need kasutavad voolu mõõtmiseks väikest takistit, mille üle pinge mõõdetakse. Neid kasutatakse sageli vooluringides, kus on vaja teada täpseid vooluhulki.
- Hall-efekti andurid: Need andurid kasutavad Hall-efekti, mis tekib magnetväljas, et mõõta voolu või pinge muutusi.
Asendi- ja liikumisandurid
- Potentsiomeetrid: Potentsiomeetrid on lihtsad asendiandurid, mis muudavad mehaanilise asendi elektriliseks signaaliks. Neid kasutatakse näiteks joysticksides ja muudes juhtseadmetes.
- Kiirendusmõõturid: Need andurid mõõdavad objekti kiirendust ja asendi muutust. Neid kasutatakse laialdaselt nutiseadmetes ja sõidukite dünaamika analüüsis.
2.3. TEMPERATUURIANDURID
Enimkasutatavad temperatuuriandurite tüübid on järgmised:
- termoelektrilised andurid;
- termoresistiivsed andurid;
- termodioodid, termotransistorid ja integreeritud temperatuuriandurid.
Neid andureid ei kasutata ainult temperatuuri, vaid ka paljude muude termiliste protsessidega seotud muutujate mõõtmiseks, nt nihe ja mõõtmed, kiirus, gaasi ja vedeliku kulu, niiskus, gaaside keemiline analüüs jne.
Termoelektrilised andurid
Sellesse gruppi kuuluvad termopaarid (joonis 2.1). Nad koosnevad kahest omavahel ühises punktis – siirde lõpus – kokku keevitatud erinevast juhist A ja B, mida nimetatakse termilisteks elektroodideks. Keevitatud otsa nimetatakse tavaliselt kuumaks ja saba või referentsotsi külmaks.
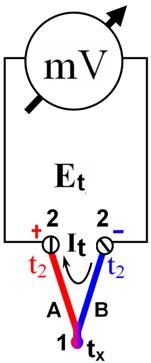
1 – kuum siire; 2 – külmad otsad
Joonis 2.1 Termoelektriline andur [60]
Kui kuuma siiret hoida temperatuuril t 1 = t x , ja külmad otsad on temperatuuril t 2 ja t 1 > t 2 , siis tekib termoelektriline elektromotoorjõud või pinge (t.e.m.j.) E T , mis on kahe temperatuuri vahe funktsioon, s. t.
(2.1)
Seda nimetatakse termoelektriliseks efektiks. Hoides t2=const, osutub võimalikus temperatuuride mõõtmine, s. t. ![]() Lihtsaim ühendusskeem temperatuuri mõõtmiseks on joonisel 2.1.
Lihtsaim ühendusskeem temperatuuri mõõtmiseks on joonisel 2.1.
Seda lihtsustatud skeemi ei saa tavaliselt praktiliselt teostada temperatuuri ja teiste mitte-elektriliste suuruste mõõtmiseks. Kuna vahemaad mõõdetava objektini on pikad, termilised elektroodid on valmistatud kallihinnalistest materjalidest ja ei neid ole majanduslik teha pikki. Sellise juhul kasutatakse pikendusjuhtmeid C ja D, mis vähendavad maksumust oluliselt (joonis 2.2)
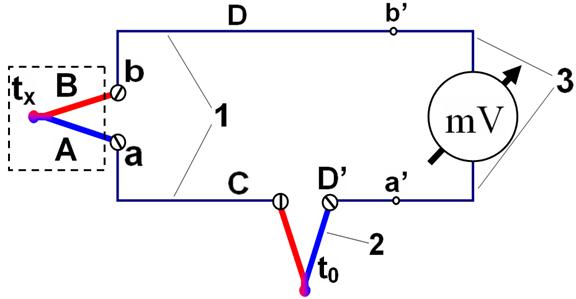
Joonis 2.2 Termoelektriline andur koos pikendusjuhtmetega [63]
Need elektroodid peavad olema termiliselt identsed – neil on A ja B elektroodide suhtes väga sarnane termiline tegur (A – C ja B – D ja D’ suhtes). Neid metalle, mis kontaktis teisega ei moodusta termopaari temperatuuridel 0 kuni 100 ° С, nimetatakse termoidentseteks.
Termopaaridega mõõtmisel on põhiline osa veast põhjustatud külmade siirete mittekonstantsetest temperatuuridest. Laboritingimustes külmi siirdeid termostateeritakse, paigutades nad referentsiks sulavasse jäässe või termostaati. Mõnedes tööstuslikes rakendustes võib külmi siirdeid termostaatida, kas paigutades nad sügavale maasse või hea soojusisolatsiooniga kasti.
Skeemis joonis 2.2 voolujuhid C ja D moodustavad kompenseeriva termopaari. Kui selle kuum siire on termostaaditud temperatuuril t 0, siis temperatuuri muutuse mõju uuele külmale siirdele a’ – b’ on välditud.
Skeemi joonis 2.3 kasutatakse laialdaselt külma siirde temperatuurimuutuse täiendava vea kompenseerimiseks.
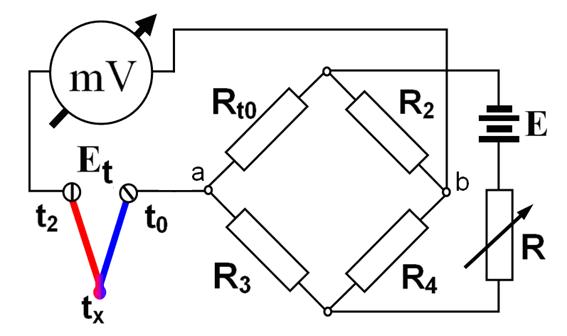
Joonis 2.3 Termoelektriline andur koos külma siirde temperatuurimuutuse täiendava vea kompenseerimisega [63]
Sildskeem on ühendatud termopaariga järjestikku. Termotundlik takisti (termistor) R T on ühendatud selle õlga samadel tingimustel kui külmad siirded. Sild on tasakaalustatud temperatuuril t 2 =t 0, mille juures termopaar on kalibreeritud. Kui see temperatuur muutub, siis termiline e.m.j. E t muutub järgmiselt: ![]() Samal ajal R t muutub sellega koos ja silla tasakaal läheb paigast. See on skaleeritud nii, et pinge punktide a ja b vahel on
Samal ajal R t muutub sellega koos ja silla tasakaal läheb paigast. See on skaleeritud nii, et pinge punktide a ja b vahel on

(2.2)
Sedasi saavutatakse automaatne kompensatsioon, s. t.

(2.3)
kus U on millivoltmeetri lugem.
Termopaarid paigutatakse kaitsekatetesse, et ennetada agressiivsete keemiliste keskkondade mõju. Kate peab olema gaasikindel, mehaaniliselt tugev ja hea soojusjuhtivusega. Kattematerjal ei tohi kuumutamisel eraldada elektroodidele kahjulikke gaase või aure. Väärismetallist termopaaride katted on kvarts- või keraamilised torud, ja teistel – eriterasest torud
Joonis 2.4 näitab skemaatiliselt termopaare ja erinevaid viise nende voolujuhtide isoleerimiseks.

a – keerutatud ja keevitatud siiretega ja isoleerimata voolujuhtidega.

b – voolujuhtidega plasttorus

c – isoleeritud voolujuhtidega
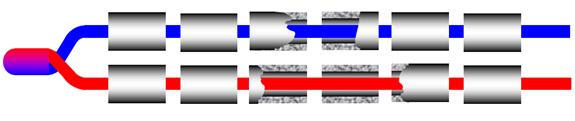
d – kinnitatud ja keevitatud siiretega ja keraamiliste isolaatoritega
Joonis 2.4 Termopaarid [63]
Termopaaridel on mittelineaarne ülekandefunktsioon, mis üldjuhul on järgmist tüüpi

(2.4)
Kus ![]() on temperatuuride erinevus kuumade ja külmade siirete vahel; А , B ja C on konstandid, mis sõltuvad termiliste elektroodide materjalist.
on temperatuuride erinevus kuumade ja külmade siirete vahel; А , B ja C on konstandid, mis sõltuvad termiliste elektroodide materjalist.
Tööstuslike termopaaride andmed on praktikas esitatud tabelites, kus termiline e.m.j. E T iga 1° С kohta temperatuuril t 2 =t 0 = 0 °С.
Termopaaridel on piirang muutuvate temperatuuride mõõtmisel – neil on suur soojusinerts: kümnetest sekunditest 10 minutini.
Tabelis 2.1 on andmed mõnede laialdasemalt kasutatavate termopaaride kohta.
Tabel 2.1
| Tüüp | Termiliste elektroodide materjal | Töötemperatuuri vahemik, С |
|---|---|---|
| T | vask – konstantaan (vase ja nikli sulam) | -200…370 |
| J | raud – konstantaan | 0…760 |
| E | kromell (nikli ja kroomi sulam) – konstantaan | -200…900 |
| K | kromell – alumell (nikli, mangaani, alumiiniumi ja räni sulam) | -200…1260 |
| R ja S | plaatina ja roodiumi sulam – plaatina | 0…1480 |
| B | plaatina-roodiumi sulam (30%) – plaatina-roodiumi sulam (6%) | 870…1700 |
- Т-tüüpi termopaarid on korrosioonikindlad ja seetõttu neid võib kasutada niiskes atmosfääris. Neid võib rakendada miinustemperatuuride mõõtmiseks. Töötades agressiivses keskkonnas, on nende tööpiirkonna ülemine piir on 370 ° С, vaskelektroodide oksüdeerumise tõttu. Neid termopaare võib kasutada kõrgematel temperatuuridel teistes keskkondades.
- J-tüüpi termopaarid on sobivad töötamiseks vaakumis ja samuti inertsetes, oksüdeerivates või taandavates keskkondades. Nad töötavad temperatuurivahemikus 0 kuni 760° С. Temperatuuril üle 540 ° С toimub termoelementide raudosade kiire oksüdeerumine. Kui termopaarid peavad töötama pikaajaliselt kõrgetel temperatuuridel, tuleb nad valmistada jämedaid juhtmeid kasutades. Seda tüüpi termopaare ei soovitata nende hapruse tõttu kasutada alla 0 ° С temperatuuril, kuna nad võivad minna rooste. Selles temperatuurivahemikus on parem kasutada T-tüüpi termopaare.
- E-tüüpi termopaare soovitatakse kasutada temperatuuridel -200 kuni 900 ° С Neid ei tohi kasutada taandavas keskkonnas või vaakumis. E-tüüpi termopaare võib kasutada temperatuuridel alla nulli, kuna nad ei korrodeeru, töötades suure niiskusesisaldusega keskkonnas. Neil on tavalistest termopaaride tüüpidest kõrgeim termiline e.m.j. ning seetõttu nad näivad olevat kõige sagedamini kasutatavad.
- K-tüüpi termopaare kasutatakse oksüdeerivas või täielikult inertses keskkonnas temperatuuride mõõtmiseks vahemikus -200 kuni 1260° С. Korrosioonikindluse tõttu kasutatakse neid sageli temperatuuridel üle 540 °С. Siiski, seda tüüpi termopaare ei tohi kasutada taandavates keskkondades, väävlisisaldusega keskkondades ja vaakumis.
- R- ja S-tüüpi termopaarid on mõeldud pidevaks kasutamiseks oksüdeerivates või inertsetes keskkondades temperatuuri vahemikus 0-1480 ° С.
- B-tüüpi termopaarid sobivad pidevaks kasutamiseks oksüdeerivates või inertsetes keskkondades temperatuurivahemikus 870-1700 °С. Neid võib kasutada lühiajaliseks mõõtmisteks vaakumis. Selliseid termopaare ei soovitata kasutada taandavates keskkondades, mis sisaldavad metallilisi või mittemetallilisi aurusid. Neid ei tohi kunagi paigutada metallist kaitsekatetesse.
Termoresistiivsed andurid
Termoresistiivsed andurid on suure temperatuurisõltuvusega voolujuhid või pooljuhid. Termotakisti takistus sõltub temperatuurist ja see on määratud seadise ja keskkonna vahelise soojusliku tasakaaluga. Soojusvahetus võib olla kahesuunaline: keskkonnast takistile ja vastupidi. Niisiis termotakisti temperatuur ja takistus antud termilise tasakaalu olukorras sõltuvad mitte üksnes voolust ja keskkonnatemperatuurist, kuid samuti hulgast muudest teguritest nagu anduri geomeetriline suurus ja kuju, alus ja kate, füüsikalised omadused, ümbritseva vedeliku kiirus ja temperatuur jne. Need tegurid mõjutavad termotakistite kasutamise võimalusi erinevate suuruste mõõtmisel.
Põhinõuded termotakistite materjalidele:
- suur elektrilise takistuse temperatuuritegur (TCR) –

- kuumuskindlus;
- suur eritakistus. See on tähtis väikesemõõduliste andurite tootmisel.
Metall-termotakistid (RTD)
Voolujuhtidest termotakistid (takistus-temperatuuriandurid – RTD) on enamasti tehtud puhastest metallidest, kuna sulamitel on väiksem temperatuuritegur (TCR). Lisaks sellele, puhaste metallides temperatuurisõltuvus on täpselt teada ja neid sisaldavad mõõteseadmed võivad töötada standardkalibreerimisega. Praktikas kasutatakse vaske, plaatina ja niklit.
Vask-termotakistid. Termotakistite valmistamiseks kasutatakse elektrolüütilist vaske. Seda võib kuumutada kuni temperatuurini 180° С. Kõrgematel temperatuuridel algab oksüdeerumine. Tema takistus sõltub temperatuurist lineaarselt vahemikus 20 kuni 180° С vastavalt võrrandile

(2.5)
kusR on takistus algtemperatuuril 0 ° С (273К) ja ![]() on ТСR
on ТСR ![]() = 4.3х10 -3. 1/ ° С temperatuuril 0 kuni 100 ° С).
= 4.3х10 -3. 1/ ° С temperatuuril 0 kuni 100 ° С).
Vasel on piirang – väike eritakistus. See on ![]() =1.75х10 -8
=1.75х10 -8 ![]() m elektrolüütilise vase korral.
m elektrolüütilise vase korral.
Plaatina-termotakistid ( >plaatina-takistustemomeetrid) . >Plaatina on keemiliselt stabiilne ja hästi plastiline. Seda võib kuumutada 1475°С-ni ilma oksüdeerumise või sulamiseta. Paljudel juhtudel on ta asendamatu nende omaduste tõttu. Tema piiranguks on mittelineaarne takistuse temperatuuritegur. Seda sõltuvust vahemikus 0 – 660 ° С määratakse võrrandiga
(2.6)
Ning vahemikus -180 – 0 ° С – valemiga
![]() (2.7)
(2.7)
kusR 0 on takistus temperatuuril 0 ° C ning A , B ja C on konstandid.
Temperatuuridele üle 660 ° С ja alla -180 °С, ![]() on antud tabelites.
on antud tabelites.
Nikkel-termotakistid. Niklit saab kasutada termotakistina, kui ta on hästi isoleeritud keskkonnamõjudest kuni u 280 ° С, kuna kõrgemal temperatuuril temperatuuritegur R t >=f (t on muutlik. Vahemikus 0 kuni 100 ° С sõltuvus on lineaarne ( ![]() 6х10 -3 1/ ° C ) ja seda saab väljendada valemiga (2.5).
6х10 -3 1/ ° C ) ja seda saab väljendada valemiga (2.5).
Nikli elektrilised omadused sõltuvad ebapuhtusest ja termilisest töötlusest. Selle materjali põhieelised on: suur elektriline takistus r= (7,5 … 8,5) x 10 -8 W m ja suur ТСR. Need omadused võimaldavad valmistada väikesemõõtmelisi termotakisteid.
Termistorid
Termistorid on takistuslikud andurid, millel on suur temperatuuritegur TCR laias temperatuurivahemikus. Praktikas neid toodetakse tilga, lameda ja silindrilise kujuga.
Iga pooljuhtmaterjali ТСR ![]() on takistuse muutuse määr antud temperatuurile vastava takistuse väärtuse suhtes. Matemaatiliselt väljendatakse seda järgmiselt:
on takistuse muutuse määr antud temperatuurile vastava takistuse väärtuse suhtes. Matemaatiliselt väljendatakse seda järgmiselt:

(2.8)
Termistore on kahte tüüpi: negatiivse temperatuuriteguriga (TCR), mille takistus väheneb temperatuuri tõustes, ja positiivse TCR-ga, mille takistus suureneb temperatuuri tõustes. Mõlemat tüüpi termistore toodetakse pooljuhtmaterjalidest ja TCR muutmisvahemik on -6,5 kuni +70%/°С.
NTC-termistore toodetakse Mn, Ni, Co, Cu ja Fe metalloksiidide segust.
Sõltuvus takistuse ja temperatuuri vahel on mittelineaarne ja seda võib esitada valemiga
(2.9)
![]() on võrdne termistori takistusega lõpmata kõrgel temperatuuril (1/Т=0), ja B on nn materjalitegur mõõdetuna kelvinites.
on võrdne termistori takistusega lõpmata kõrgel temperatuuril (1/Т=0), ja B on nn materjalitegur mõõdetuna kelvinites.
Konstandi B väärtused on tavaliselt vahemikus 3000 kuni 5000К. Konstanti В võib väljendada kui
 (2.10)
(2.10)
kusR1 ja R2 on termistori takistus vastavalt temperatuuridel T1 ja T2 .
Termistoridel on negatiivne temperatuuritegur
![]() (2.11)
(2.11)
mis tugevasti sõltub temperatuurist ja on 8 kuni 10 korda suurem kui metallidel.
Nendel termistoridel on oluliselt suurem eritakistus. See võimaldab valmistada väikesemõõtmelisi termistore, millel on väiksem inerts. Muutes termistoride materjali ja mõõtmeid, võib saada takistusi 1 kuni 10 6 W toatemperatuuril ja TCR on -2 kuni -6,5%/С. Teisalt, termistorid on mittelineaarsete tunnusjoontega , mis ei ole täielikult samasugused ühte ja sama tüüpi termistoridel. See piirab nende vahetatavust. Nad on tundlikud niiskusele ja nad on selle mõju vältimiseks kaetud lakkisolatsiooniga.
PTC-termistorid võib jaotada kahte põhimõtteliselt erinevasse gruppi sõltuvalt kasutatud pooljuhtmaterjali tüübist ja omadustest.
Esimene grupp hõlmab väikese plaadikujulisi (tavaliselt ränist) pooljuht-termistore kahe vastaskülgedel asuva klemmiga. Nende elementide kasutamine põhineb faktile, et ränikristallid nii n- kui p- tüüpi lisandiga on positiivse TCR-ga, alates ülimadalatelt temperatuuridelt kuni 150 С ja üle selle. TCR toatemperatuuril on ligikaudu 0,8%/° С.
Teine grupp koosneb positiivse TCR-ga termotakistitest (kuni 70%/ ° С), kuid piiratumas temperatuurivahemikus. Selliste elementide materjalina saab kasutada polükristallilist pooljuhti baarium-titanaati, kuna tal on suured TCR-i muutused faasimuutuse temperatuuri lähedal, mis vastab Curie temperatuurile.
Joonis 2.5 näitab takistuse muutuse kõveraid sõltuvalt temperatuurist erinevat tüüpi termistoridel ja plaatina-termotakistil.
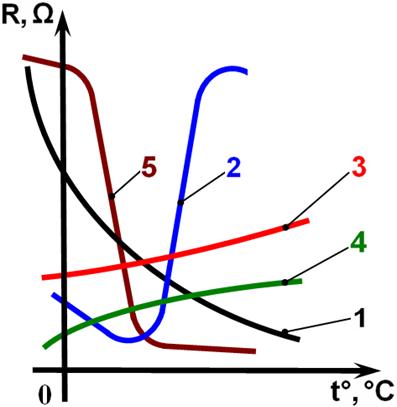
1 – termistor negatiivse temperatuuriteguriga
2 – termistor positiivse temperatuuriteguriga
3 – positiivse temperatuuriteguriga ränitermistor
4 – plaatina-termotakisti
5 – negatiivse temperatuuriteguriga termistor, millel on suur takistuse muutus nimivahemikus
Joonis 2.5 takistuse muutuse kõverad sõltuvalt temperatuurist erinevat tüüpi termistoridel ja plaatina-termotakistil.
Termistore, millele on iseloomulik eriti suur TCR kriitilise temperatuuri tsoonis, nimetatakse paljudes publikatsioonides kriitilise temperatuuri takistiteks (CTR–termistorid). Sõltuval materjalist võib takistus kriitilises temperatuurivahemikus nii suureneda kui väheneda (näiteks BaTiO3 baasil – joonis 2.5 kõver 2 ja VO2 baasil – kõver 5).
Kaasaegsete termistoride temperatuurivahemik on laienenud 75-1275 К, mis muudab nad väga laialdaselt kasutatavaks.
Täpismõõtmisteks kasutatakse negatiivse TCR-ga termistore.
Termodioodid, termotransistorid ja integreeritud temperatuuriandurid
Neid kasutatakse temperatuuri mõõtmiseks vahemikus -80° kuni 150 °С. Nende tööpõhimõte põhineb päripingestatud pn-siirde takistuse temperatuurisõltuvusele (joonis 2.7).
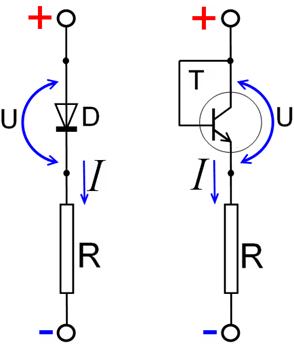
Joonis 2.7 Termodiood ja termotransistor
Nende temperatuuritundlikkus on
![]() , V/°>C .
, V/°>C .
(2.12)
See on muutuv, kuna ![]() on mittelineaarne. Keskmine tundlikkus on hea ja see on suurusjärgus 2,5 mV/°C
on mittelineaarne. Keskmine tundlikkus on hea ja see on suurusjärgus 2,5 mV/°C
Tundlikkus sõltub pn-siirde vastuvoolust. Dioodid ja transistorid erinevad vastuvoolult oluliselt, mis tähendab, et neid on raske omavahel asendada.
Eeliseks on nende madal hind.
Vastuvoolude efekt väheneb oluliselt ning saavutatakse parem lineaarsus, kui kasutada kahte transistori ühes kestas (joonis 2.8).
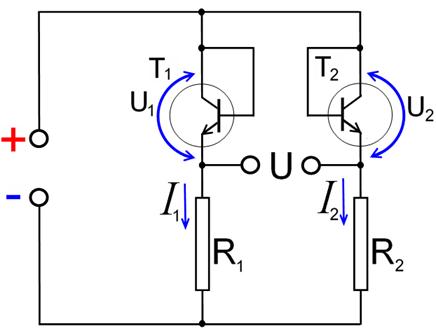
Fig.2.8 Vastuvoolude efekt
Voolud I 1 ja I 2 läbivad pn-siirdeid. On tähtis, et neil transistoridel oleks võrdsed vastuvoolud. See on diferentsiaallülitus ja väljundpinge on ![]() Selle ahela tundlikkus on palju väiksem kui ühe transistoriga, kuid tunnusjoon img width=71 height=25 src=”Andurid_fail/image089.gif” v:shapes=”_x0000_i1069″> on palju lineaarsem:
Selle ahela tundlikkus on palju väiksem kui ühe transistoriga, kuid tunnusjoon img width=71 height=25 src=”Andurid_fail/image089.gif” v:shapes=”_x0000_i1069″> on palju lineaarsem:
(2.13)
(2.14)
(2.15)
kus I 0 on transistoride vastuvool, mis on eeldatavasti võrdsed;
Т – temperatuur Kelvinites;
k – Boltzmann’i konstant;
q – elektroni laeng

(2.16)

(2.17)
kus  .
.
![]() .
.
(2.18)
kui n = 2, ![]() .
.
Selle transistoripaari võib teostada integraallülitusena kristalli pinnal. Sellisel juhul integreeritud transistoride parameetrid on paremad ja anduri tunnusjooned on peaaegu lineaarsed. Näiteks integraallülitus AD390, millel on lineaarne tunnusjoon. Väljundsignaaliks on vool. Temperatuurivahemik on -55 kuni 150 ° С ja tundlikkus on ![]()
2.4. JÕU- JA MEHAANILISE PINGE ANDURID
Enimkasutatavad jõu- ja mehaanilise pinge andurite tüübid on järgmised:
- tensoandurid;
- piesoelektrilised andurid;
- magnetoelastsed andurid.
Tensoandurid
Tensoandurid on kas elektrijuht- või pooljuhtmuundurid. Nende talitlus põhineb venitusefektile.
Venitusefekt on anduri aktiivtakistuse muutus selle geomeetrilise suuruse ja vastupanu muutuse tõttu elastsel mehaanilisel deformatsioonil. Sel viisil saadud muutust iseloomustavad suhteliselt väikesed väärtused. Venitusefekti kvantitatiivseteks tunnusjooneks on suhtelise venitustundlikkuse tegur k, mis on määratud avaldisega
(3.1)
kus ![]() on voolujuhi takistuse suhteline muutus ja
on voolujuhi takistuse suhteline muutus ja ![]() on selle pikkuse suhteline muutus. Suurel osal voolujuht-tensoanduritel k väärtused on 1.9 kuni 2.5.
on selle pikkuse suhteline muutus. Suurel osal voolujuht-tensoanduritel k väärtused on 1.9 kuni 2.5.
Tensoandurid jaotatakse:
- voolujuht-tensoandurid;
- foolium tensoandurid;
- pooljuht-tensoandurid.
Voolujuht-tensoandurid
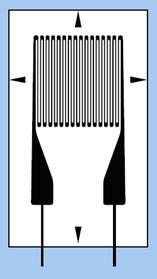
Joonis 3.1 kujutab kõige tavalisemat voolujuht-tensoanduri lihtsustatud ehitust.
Vooljuhtidena kasutatakse sulameid, nagu manganiin, konstantaan jne, kuna neil on väike takistuse temperatuuritegur (TCR) ja suur takistus.
Vooljuhi paigutuse pikkust А nimetatakse baasiks ja В on anduri laius.
Tensoandur kinnitatakse liimiga selle osa külge, mille deformatsiooni tuleb uurida. Selle pikkuse suund peab olema rööbitine mehaanilise pinge suunaga.
Kui tensoanduri tegur k on teada ning pärast tensomuunduri takistuse muutuse mõõtmist ![]() võib määrata selle pikkuse suhtelise muutuse kui
võib määrata selle pikkuse suhtelise muutuse kui
ja samuti tõmbe- või survepinge
(3.3)
1 – uuritav osa; 2 – baas (õhuke isoleeritud paber või plastikpadi, tavaliselt sitke pärgamiin või lakk – ![]() = 40…50 >m); 3 – voolujuht (d=0,01…0,03 mm); 4 – tinatatud vaskjuhi klemmid (d=0,1…0,3 mm); 5 – kattekiht – kondensaatorpaber või lakk (
= 40…50 >m); 3 – voolujuht (d=0,01…0,03 mm); 4 – tinatatud vaskjuhi klemmid (d=0,1…0,3 mm); 5 – kattekiht – kondensaatorpaber või lakk (![]() =10…15 m>m)
=10…15 m>m)
Joonis 3.1 Voolujuht-tensoandur [63]
Mõõdetav jõud F on määratud kui

(3.4)
kus s on objekti ristlõikepindala.
Kuna on võimatu kasutada ühte tensoandurit rohkem kui ühel objektil, tuleb märkida, et kasutatav k väärtus määratakse antud partii proovide statistilise keskmistamisega ja kalibreerimine teostatakse 8-10% näidistele partiist.
Selle tüübi tensoandurite puuduseks on nende suur risttundlikkus. Voolujuht-tenosandurite piki- ja risttundlikkus on määratud suhtega B/A.
Selle puuduse saab suures osas kõrvaldada ristpiirkondadesse paigutatud vasksildadega.
Foolium-tensoandurid
Foolium-tensoandureid kasutatakse praktikas laialdaselt (joonis 3.2).
Joonis 3.2 Foolium-tensoandur [60]
Neid valmistatakse fotokeemilistel meetoditel. Metallfoolium kaetakse fototundliku kihiga ja sellele fotografeeritakse muunduri kuju. Nende eeliseks on voolujuhi suurem laius ristsuuna piirkondades, mis vähendab nende piirkondade takistust ja seega ka risttundlikkust.
Pooljuht-tensoandurid
Pooljuht-tensoandureid valmistatakse sarnase meetodiga nagu foolium-tensoandureid. Nende rakendusi on laiendatud, kasutades germaaniumist, ränist, gallium-arseniidist jne pooljuhtmuundureid. Nende tõmbetundlikkus on tüüpiliselt 50-60 korda kõrgem kui metall-tensoanduritel väga väikese baasi korral (2,5 mm). Nende tõmbetundlikkuse tegur sõltub tugevasti temperatuurist ja tunnusjoon ![]() on mittelineaarne.
on mittelineaarne.
Foolium- või pooljuht-tensoandurite baasil valmistatakse tensoandurite erinevaid konfiguratsioone ning kombinatsioone.
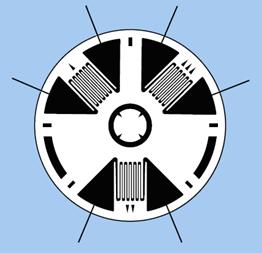
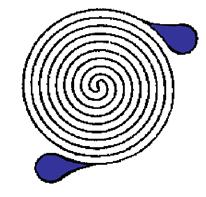
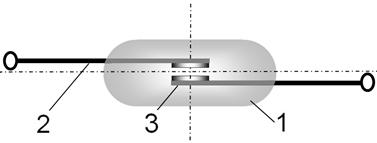
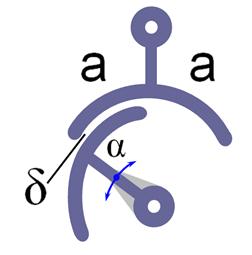
Joonis 3.3 Pooljuht-tensoandur [60]
Joonis 3.3 kujutab andurit 3 üksteise suhtes 120° all asetseva tensoanduriga. Need moodustavad roseti, mille kaudu saab määrata mõjuvate keerukate mehaaniliste pingete resulteeruva mehaanilise pinge antud kitsas alas (punktis).
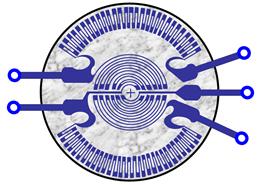
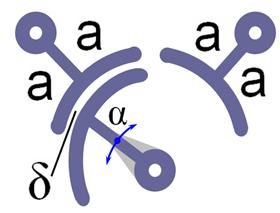
Joonis 3.4 kujutab andurit, mis sisaldab kahte tensoandurit, mis on paigutatud 90° üksteise suhtes. Neid kasutatakse peamiselt mehaaniliste pingete ja pöördemomendi määramiseks pöörlevate masinate võllidel. (Joonis 3.5).
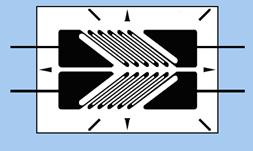
Joonis 3.4 Pooljuht-tensoandur 2x [60]
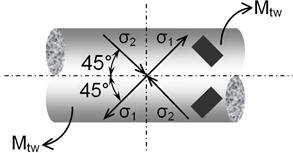
Joonis 3.5 Pooljuht-tensoandur 2x [60]
Piesoelektrilised andurid
Nende andurite töö põhineb piesoelektrilisele efektile, mis esineb mõnedes dielektrilistes materjalides. Kui sellisest materjalist lõigatud plaati mehaaniliselt koormata, see polariseerub ja tema pinnal tekivad rakendatud jõuga võrdelised elektrilaengud. Koormuse eemaldamisel polarisatsioon ja laengud kaovad. Seda nähtust nimetatakse otseseks piesoelektriliseks efektiks.
Kui selline plaat asetada elektrivälja, tekib temas mehaaniline pinge või muutuvad geomeetrilised mõõtmed. Seda nimetatakse kaudseks piesoelektriliseks efektiks.
Laialdaselt kasutatavate piesoelektrikute tüüpiliseks näiteks on moonutusteta kristallivõrega kvarts. Seignette sool ja mõned keraamilised materjalid: piesoelektrikutena kasutatakse ka kunstlikult polariseeritud baariumtitanaati, plii-tsirkoonium-titanaati jne.
Piesoelektrilised andurid on generaatori tüüpi. Elektrilised laengud tekivad välise jõu mõjul.
Jõudude mõõtmiseks kasutatava anduri tekitatud laengud ja pinge jäävad samaks ainult siis, kui mõõteahelal on lõpmata suur sisendtakistus, mis on praktiliselt võimatu.
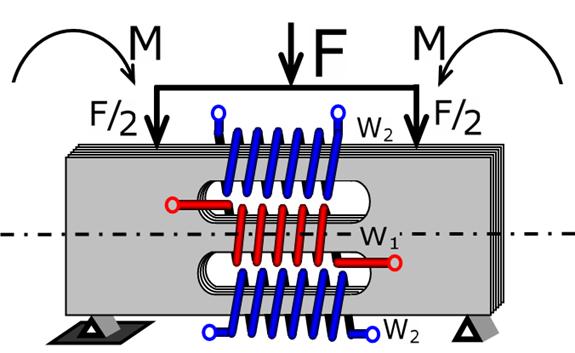
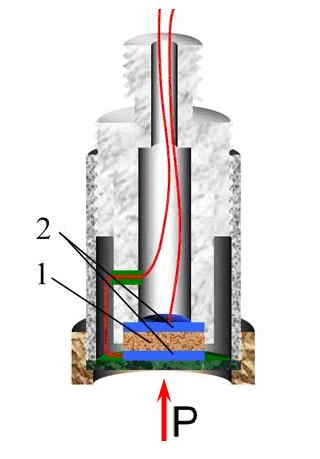
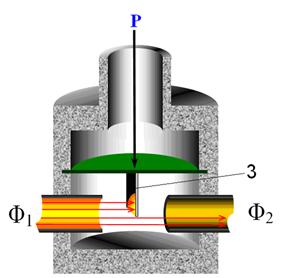
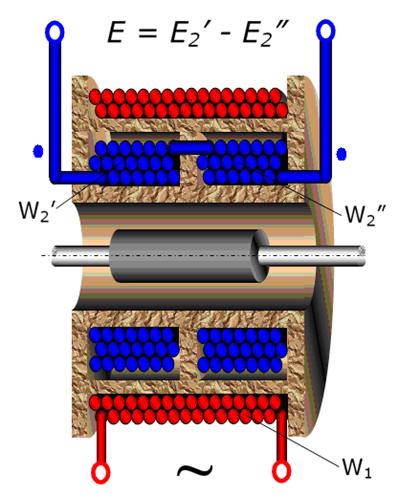
Piesoandurite minimaalsed talitlussagedused on tavaliselt (1 … 0,5) Hz. Staatiliste jõudude mõõtmiseks kasutatakse nn piesotrafosid (joonis 3.6).
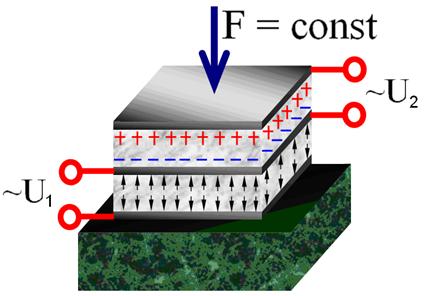
Joonis 3.6 Piesoelektriline andur [63]
Kaks piesoandurit paigutatakse tulpa üksteise peale. Vahelduvpinge ![]() rakendatakse alumisele andurile. Alumise kristalli geomeetrilised mõõtmed muutuvad sageduse taktis pöördpiesoelektrilise efekti tulemusel, s. t. tekivad lainetused ja ta muutub emitteriks. Pealmine staatilise jõuga koormatud muunduri seintel tekivad lainetest elektrilaengud piesoelektrilise efekti tulemusel. Väljundelektroodide elektriliste potentsiaalide vahe
rakendatakse alumisele andurile. Alumise kristalli geomeetrilised mõõtmed muutuvad sageduse taktis pöördpiesoelektrilise efekti tulemusel, s. t. tekivad lainetused ja ta muutub emitteriks. Pealmine staatilise jõuga koormatud muunduri seintel tekivad lainetest elektrilaengud piesoelektrilise efekti tulemusel. Väljundelektroodide elektriliste potentsiaalide vahe ![]() >on võrdeline rakendatud jõuga. Viimast saab määrata kas
>on võrdeline rakendatud jõuga. Viimast saab määrata kas ![]() >väärtuse alusel või
>väärtuse alusel või ![]() ja
ja ![]() faasinihke järgi.
faasinihke järgi.
Praktikas piesotrafod on valmistatud ühtse kolme elektroodiga muundurina.
Magnetoelastsed andurid
Magnetelastsed muundurid põhinevad magnetoelastsel efektil, mis avaldub ferromagnetiliste materjalide magnetilise läbitavuse muutuses välistest jõududest põhjustatud mehaaniliste pingete toimel.
On olemas ka vastupidine nähtus, mida nimetatakse magnetostriktiivseks efektiks, mis avaldub magnetvälja paigutatud ferromagnetiliste materjalide geomeetriliste mõõtmete muutuses. Seega, kui ferromagnetilise eseme mõõtmed suurenevad, on see positiivne magnetostriktsioon ![]() , kui väli vähendab eseme mõõtmeid – negatiivne magnetostriktsioon
, kui väli vähendab eseme mõõtmeid – negatiivne magnetostriktsioon ![]() . Raual ja enamusel rauasulamitel esineb positiivne magnetostriktsioon, kuid nikkel jt on negatiivse magnetostriktsiooniga.
. Raual ja enamusel rauasulamitel esineb positiivne magnetostriktsioon, kuid nikkel jt on negatiivse magnetostriktsiooniga.
Magnetoelastse efekti abil saab mõõta jõude, mehaanilisi pingeid ja momente. Magnetostriktiivse efekti põhjal on välja töötatud ultrahelilainete allikaid.
Induktiivset tüüpi magnetoelastsed andurid
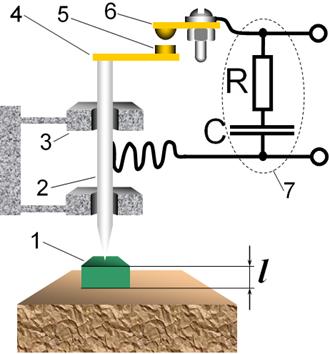
Induktiivset tüüpi magnetoelastne andur on kujutatud joonisel 3.7.
Joonis 3.7
Kui jõud F on rakendatud magnetsüdamikule, tekivad mehaanilised venitused ja pinged ![]() , mille tulemusel muutub magnetiline läbitavus
, mille tulemusel muutub magnetiline läbitavus ![]() , põhjustades magnetilise takistuse
, põhjustades magnetilise takistuse ![]() muutuse. Kui
muutuse. Kui ![]() muutub, siis pooli induktiivsus L muutub, mis põhjustab näivtakistuse z muutuse.
muutub, siis pooli induktiivsus L muutub, mis põhjustab näivtakistuse z muutuse.
 ;
; ;
;![]()
(3.5)
Kui ![]() , siis
, siis ![]()
Seega

(3.6)
Andur joonis 3.7 positiivsel magnetostriktsioonil

(3.7)
kehtib, kus ![]() on pooli algne näivtakistus, kui F=0.
on pooli algne näivtakistus, kui F=0.
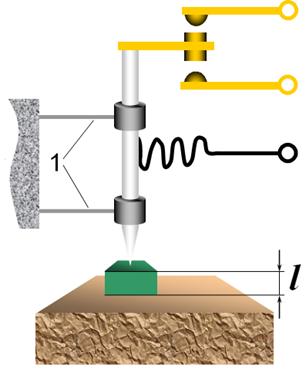
3.3.2. Vastastikku induktiivset tüüpi magnetoelastsed andurid
Iga magnetelastse muunduri võib muuta vastastikku induktiivset (trafo-) tüüpi muunduriks, kui ümber magnetsüdamiku kerida mõõtepool (joonis 3.8).
Joonis 3.8 Magnetoelastne andur [63]
Seda tüüpi muundurites

(3.8)
(3.9)
kehtib.
Vastastikku induktiivset tüüpi magnetoelastne muundur positiivse magnetostriktsiooni korral joonis 3.10

(3.10)
kehtib.
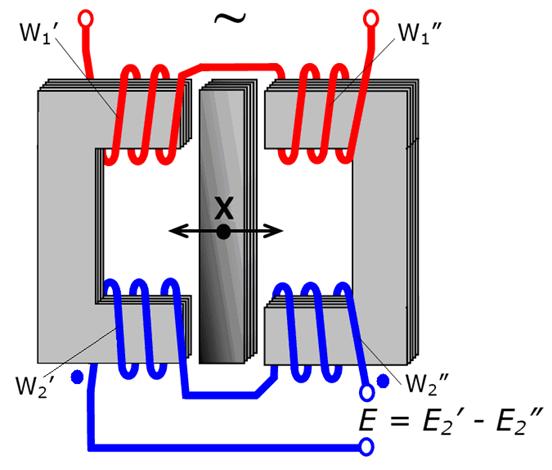
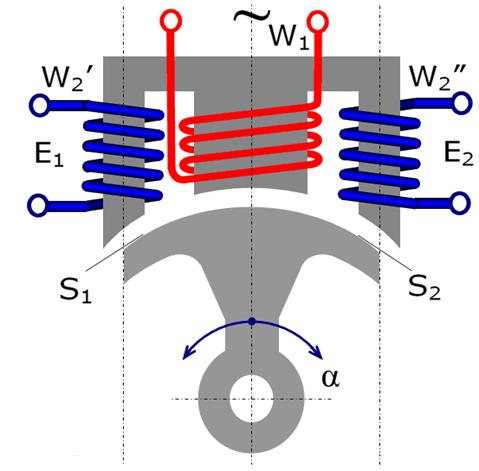
Vaadeldud muundurid võivad olla üksikud ja diferentsiaalsed. Joonis 3.9 illustreerib magnetoelastset painduva magnetahelaga trafo-diferentsiaalmuundurit.
Joonis 3.9 Magnetoelastne painduva magnetahelaga trafo-diferentsiaalmuundur [63]
Ferromagnetilisest materjalist varras asetatud kahele toele. Ergutusmähis W1 asetseb keskmisel sambal ning mõõtepooli kaks sektsiooni ![]() ja
ja ![]() on paigutatud teisele kahele sambale.
on paigutatud teisele kahele sambale.
Magnetoanisotroopsed muundurid
Nn magnetoanisotroopsed muundurid kuuluvad magnetoelastsete muundurite hulka. Nad põhinevad ferromagnetiliste materjalide magnetilisel mitteisotroopsusel, kui neis tekivad välistest jõududest põhjustatud mehaanilised pinged.
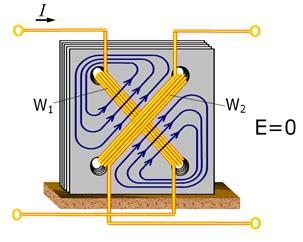
Joonis 3.10 Magnetoanisotroopsed muundurid [63]
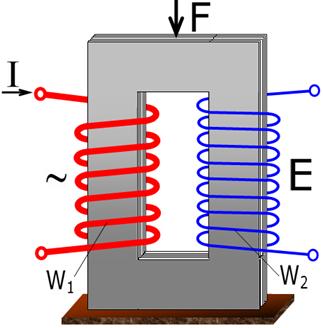
Mitteisotroopsus on materjalide magnetilise läbitavuse erinevus erinevates geomeetrilistes piirkondades. Muundur on kujutatud joonisel 3.10. See on trafotüüpi.
Magnetsüdamik on valmistatud lehtmaterjalist. Sellesse on puuritud neli ava, mis asuvad ruudu tippnurkades. Ergutusmähis W1 ja mõõtemähis W2 on paigutatud üksteise suhtes täisnurga alla, mis väldib nendevahelist induktiivset sidet.
Kui mõõtemuundur on koormamata (F=0 – joonis 3.12а), siis materjalis pole magnetilist mitteisotroopsust. Ergutusmähise tekitatud magnetvoog kulgeb piki jooni, mis ei lõiku mõõtemähisega W2 ja selles ei teki e.m.j.
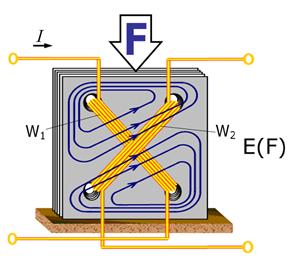
Kui rakendatakse jõudu F (joonis 3.12b), tekivad magnetsüdamikus mehaanilised pinged – sel juhul need on survepinged. Magnetiline mitteisotroopsus tekib materjalis. Positiivse magnetostriktsiooni korral magnetiline läbitavus väheneb rakendatud jõuga paralleelses suunas, kusjuures jõuga ristsihis magnetiline läbitavus väheneb. Selle tulemusena magnetvälja jõujooned moonduvad. Osa nendest jõujoontest ümbritsevad mõõtemähise ja e.m.j.

(3.15)
indutseeritakse selles võrdeliselt jõuga.
2.5. RÕHUANDURID
Rõhu füüsikalised omadused
Füüsikaline kontseptsiooni rõhk on määratud kui kindlale pinnale rakendatud jõu mõju. Rõhku kirjeldatakse kui
![]() (4.1)
(4.1)
kus P on rõhk, F on jõud ja S on pindala, millele jõud on rakendatud.
SI süsteemi rõhuühik on Pa (Pascal). Üks Pa on määratud kui üks N (Newton) m2 (ruutmeetrile) – ![]() . Lisaks paskalitele Pa kasutatakse praktikas sageli ka teisi mõõtühikuid nagu: psi (naela ruuttollile), atm (atmosfäär), bar, millimeetrit elavhõbedasammast, mida on sageli nimetatud ka torriks.
. Lisaks paskalitele Pa kasutatakse praktikas sageli ka teisi mõõtühikuid nagu: psi (naela ruuttollile), atm (atmosfäär), bar, millimeetrit elavhõbedasammast, mida on sageli nimetatud ka torriks.
Rõhuühikute teisendused heakskiidetud SI ühikuks Pa on tabelis 4.1.
Tabel 4.1
| Ühik | Teisendamine paskaliteks Pa |
| 1 psi | 6894.757 |
| 1 bar | 100000 |
| 1 atm | 101325 |
| 1 torr | 133.322 |
Rõhu mõõtmiseks võib tutvustada järgmisi põhimõtteid:
atmosfäärirõhk: see on atmosfääri rõhk maapinnal. Atmosfäärirõhuks merepinnal eeldatakse 101.325 kPa. See rõhk väheneb kõrguse suurenedes.
Rõhk 0 Pa on täielik vaakum.
Vaakumiks nimetatakse rõhkusid täielikust vaakumist atmosfäärirõhuni.
Rõhuandurite tüübid vastavalt mõõtetehnikale
Praktikas mõõdetakse peamiselt gaasige ja vedelike rõhku. Rõhu mõõtmiseks erinevates põhitehnikates on välja töötatud suur hulk andureid.
Absoluutse mõõtmisega
Seda tüüpi anduritega (joonis 4.1) määratakse rõhku vaakumis suhtes.
Joonis 4.1 Rõhuandur määratakse rõhku vaakumis suhtes [63]
Näidikandurid
Seda tüüpi andurid mõõdavad rõhku atmosfäärirõhu suhtes. (joonis 4.2). Referentsrõhuna kasutatakse atmosfäärirõhku. Üks variant seda tüüpi andureid määrab rõhku atmosfäärirõhu suhtes merepinnal.
Joonis 4.2. Rõhuandur määratakse rõhku atmosfääriõhu suhtes [63]
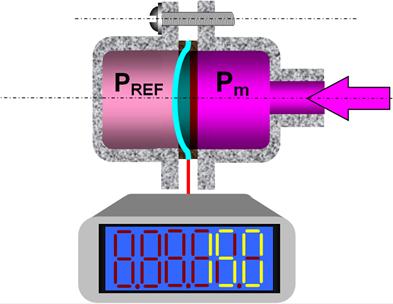
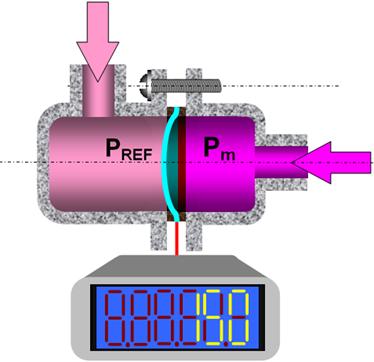
Diferentsiaalse mõõtmisega
Seda tüüpi andurid (joonis 4.3) mõõdavad rõhku teatud referentsrõhu suhtes. Nende andurite tööpõhimõte sarnaneb näidikanduritele, kuid referentsrõhk erineb atmosfäärirõhust ja andur mõõdab erinevust rakendatud ja referentsrõhu erinevust.
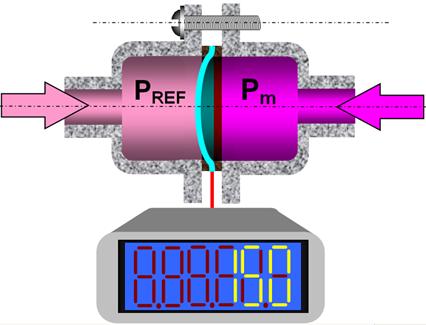
Joonis 4.3 Rõhuandur mõõdavad rõhku teatud referentsrõhu suhtes [63]
Andurite tüübid vastavalt nende tööpõhimõtetele
Rõhu mõõtmiseks on välja töötatud palju erinevate mehaaniliste konstruktsioonidega või vedeliku torus liikumisele põhinevaid rõhuandureid. Automaatikas kasutamiseks pakuvad huvi elektrilise väljundsignaaliga rõhuandurid, mida saab ühendada mingit liiki jälgimis- ja juhtimisaparatuuriga.
Kõige laialdasemalt kasutatavate rõhuandurite ehituses kasutatakse diafragmat. Membraan on plaat, mis paindub rõhu rakendamisel, ja kõrvalekalle sõltub rakendatud rõhust.
Allpool käsitletakse mõnede praktikas laialdaselt rakendatavate andurite kõige tavalisemaid konstruktsioone.
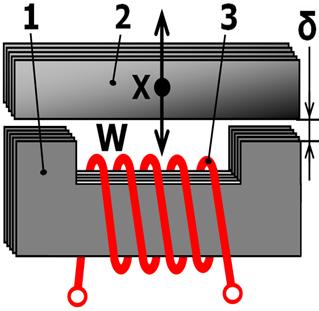
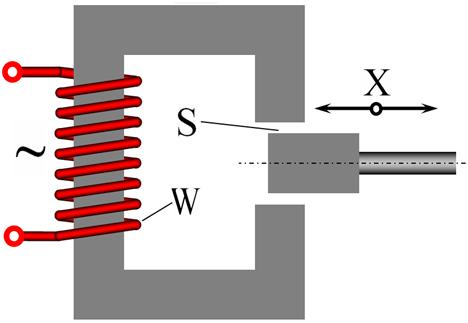
Vastastikku induktiivsed andurid
Seda tüüpi andurid sisaldavad diferentsiaaltrafot, mille magnetahel on ühendatud anduri membraaniga (joonis 4.4). Rõhu rakendamisel membraan paindub, mille tulemusena diferentsiaaltrafo südamik nihkub. Trafo kaks sekundaarmähist on ühendatud vastasfaasides. Primaarmähist toidetakse siinuselise pingega. Kui südamik on trafo magnetilises keskmes, siis trafo väljundsignaal on null. Kui südamik nihkub, siis väljundpinge amplituud muutub sõltuvalt nihkest. Nihke suuna määramiseks saab kasutada faasinihet sisend- ja väljundsignaalide vahel.
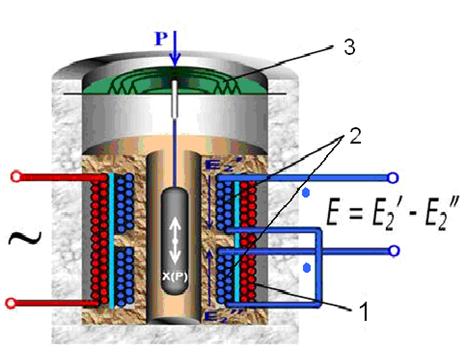
1- primaarmähis; 2- sekundaarmähised; 3- membraan
Joonis 4.4 Vastastikku induktiivne andur [63]
Mahtuvusandurid
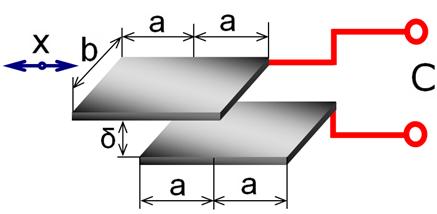
Membraan deformeerub rõhu rakendamisel. Viimane täidab kondensaatori plaadi rolli (joonis 4.5). Kui see nihkub, siis kondensaatori mahtuvus muutub. Sobiva elektroonikaskeemiga saab mahtuvuse muutuse lihtsalt teisendada anduri väljundsignaali muutuseks.
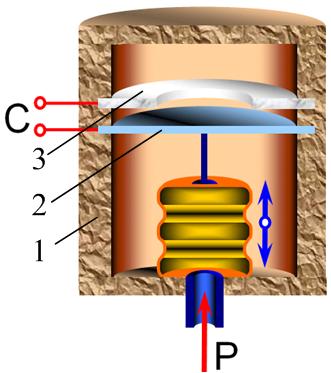
1- anduri kest; 2- membraan; 3 – elektrood
Joonis 4.5 Mahtuvusandur [63]
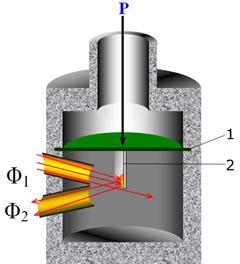
Piesoelektrilised andurid
Seda tüüpi andurites kasutatakse andurimembraaniga ühendatud ühe või mitme piesokristalli piesoelektrilist efekti (joonis 4.6). Kui membraan nihkub, siis piesokristall tekitab laengu, mis sõltub membraanile rakendatud rõhust.
1- piesoelektriline element; 2 – elektroodid
Joonis 4.6 Piesoelektriline andur [63]
Seda tüüpi andurid sobivad dünaamiliselt muutuva rõhu mõõtmiseks.
Tensoandurid
Seda tüüpi andurid kasutatakse kõige laialdasemalt. Tensoanduritega konstruktsioone on välja töötatud suurel hulgal. Tensoandurid valmistatakse sobivate kujudega (joonis 4.7) ja nad paigutatakse deformeeruvale membraanile.
a
b
Joonis 4.7 Tensoandurid
Rõhu mõjul membraani kuju muutub ja see põhjustab tensoandurite kuju muutuse. Seega muutub nende takistus. Takistuse muutuse saab lihtsalt muundada väljundsignaaliks, mis vastab andurile rakendatud rõhule. Joonisel 4.7 kujutatud tensoanduri element sisaldab 4 rõhu tensoandurit, mis moodustavad alalisvoolusilla 4 õlga.
Optilised andurid
Optilise andurid võivad talitleda valguse peegeldumise või ülekande põhimõttel (joonis 4.8).
a
b
1 – membraan; 2 – peegeldav element; 3 – barjäär
Joonis 4.8 Optilised andurid [63]
Esimest tüüpi andurites (joonis 4.8а) peegeldav element on paigutatud membraanile, mis sõltuvalt rakendatud rõhust ja membraani paindumisest peegeldab teatud hulgal temale langevat valgust tagasi vastuvõtjale. Valguse ülekandega andurites (joonis 4.8b) membraanile kinnitatud barjäär vähendab rõhu tõustes vastuvõtjale langeva valguse hulka.
2.6. POSITSIOONI-, NIHKE-, KIIRUS- JA KIIRENDUSANDURID
Enimkasutatavad positsiooni-, nihke-, kiirus- ja kiirendusandurite tüübid on järgmised:
- kontaktandurid;
- potentsiomeetrilised anduri;
- induktiivsed ja vastastikku induktiivsed andurid;
- mahtuvuslikud mõõtemuundurid;
- absoluutenkooderid;
- optilised muundurid;
- piesoelektrilised muundurid.
Kontaktandurid
Kontaktandurid (contacthrones) on muundurid, milles sirgjooneline või nurga nihe (mõõtmed) muundatakse elektriahelat juhtivate kontaktide avatud või suletud olekuks.
On välja töötatud ühepiirkonna- (joonis 5.1), topeltpiirkonna- (joonis 5.2) ning mitmepiirkonna- (joonis 5.3) kontaktandureid.
1 – juhitav objekt; 2 – võll; 3 – silindrilised juhikud; 4 – kontaktelektrood;
5 – lame (silindriline) kontakt; 6 – fikseeritud kontakt; 7 – kaarekustutusgrupp
Joonis 5.1 Kontaktandur [63]
1 – lamevedrud
Joonis 5.2 Kontaktandur [63]
1 – isolatsioon
Joonis 5.3 Kontaktandur [63]
(5.1)
Kontaktid on valmistatud hõbedast, vasest, plaatinast, roodiumist, volframist, molübdeenist jne. Kaarekustutusgrupi ülesanne on vältida sädemeid ja elektrikaart.
Magnet-juhtimisega kontaktid
See on üks variant kontaktmuunduritest (joonis 5.4). Neid nimetatakse ka herkoniteks (hermeetilisteks kontaktideks) või keelanduriks.
1 – klaasampull; 2 – magnetiliselt pehmest materjalist elekroodplaadid (nt. permalloi); 3 – kontaktid (plaatina, kuld, hõbe jne)
Joonis 5.4 Herkonandur [63]
Klaasampulli läbimõõt on u 3 mm ja see on u 20 mm pikkune. See on täidetud kas inertgaasiga (lämmastik, argoon või vesinik) või see on hermeetiline. Elektroodplaadid on sellesse pressitud. Nad on valmistatud magnetiliselt pehmest materjalist (tavaliselt permalloi). Magnetväli sulgub nende ümber ja läbi kontaktide vahelise õhupilu. Kontaktid on kaetud hõbeda, kulla, plaatina, plaatina-roodiumi või nende sulamitega. Elektroodid töötavad magnetahelana, kontaktide ja vedrudena.
Kontakte juhitakse välise magnetväljaga, mida tekitab püsimagnet. Magnetväli muutub kahel viisil:
magnetvälja tekitava püsimagneti liigutamise või pööramisega (jooni 5.5а, b);
püsimagneti ja ampulli vahele paigutatud ekraani liigutamisega (joonis 5.5c).

a

b

c
Joonis 5.5 Herkonanduri tööpõhimõte [63]
Magnet-juhitavatel kontaktidel on järgmised eelised: väikesed mõõtmed, madal hind, hea oksüdeerumise- ja tolmukindlus, suur lülituste arv – 10 6 …10 9 , hea kiirus – 0,2…0,5 >m/s jne.
Potentsiomeetrilised andurid
Mehaaniliste kontaktidega potentsiomeetrilised andurid
Potentsiomeeter on takisti konstantse takistuse väärtusega R p , millel libiseb liugur, mis moodustab elektrilise kontakti. Liugur on mehaaniliselt ühendatud uuritava objektiga, mille liikumist tuleb üle kanda.
Takistus R liuguri ja takisti ühe otsa vahel on järgmine funktsioon:
liuguri asend;
takisti ehitus.
Kui takistil on homogeenne ehitus, siis potentsiomeeter on lineaarne, kuna esineb otsene proportsionaalne sõltuvus takistuse R ja liuguri asendi vahel. Sel juhul saab sõltuvalt liuguri nihketrajektoorist eristada:
lineaarse nihkega potentsiomeetreid (joonis 5.6 а)
(5.2)
a
b
c
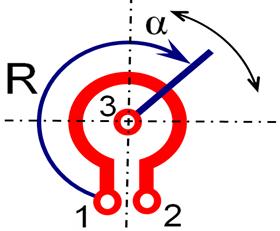
Joonis 5.6 Potentsiomeetrilised andurid
pöördpotentsiomeetreid
(5.3)
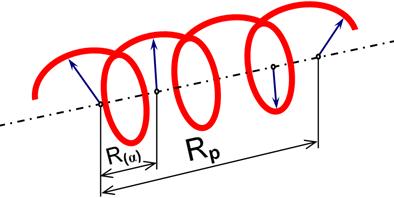
See alagrupp sisaldab: ringpotentsiomeetreid (![]() ) (joonis 5.6 b)mitmepöördelisi potentsiomeetreid
) (joonis 5.6 b)mitmepöördelisi potentsiomeetreid ![]()
(joonis 5.6 c)
Potentsiomeetriliste andurite takisti võib olla kas elektrijuht või voolujuhtiv riba.
Kui nendes andurites on kasutatud õhukest kalibreeritud voolujuhti koos liuguriga, neid nimetatakse ka reohordmuunduriteks (reohordideks).
Kui voolujuht on mähitud karkassile, neid nimetatakse reostaatanduriteks.
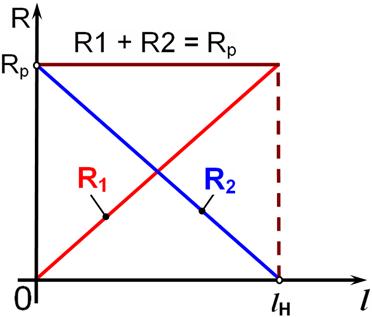
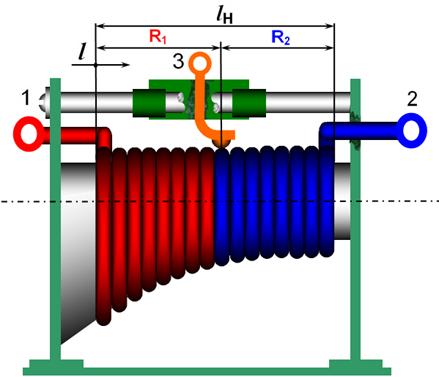
Reostaatanduridon erilahendusega reostaadid, mille liugur liigub sisendsuurusega– lineaar- või nurknihe vm suurus (jõud, rõhk jne), mis on eelnevalt muudetud lineaarseks või nurknihkeks. Seetõttu nende muundurite ülekandefunktsiooniks on:

(5.4)
kus X on sirgjooneline või nurganihe.
Kõige sagedamini kasutatakse lineaarseid reostaate. Nende takistustraat on mähitud karkassile kogu selle pikkuses ühtlase sammuga ühtse sektsioonina (joonis 5.7 а). Liugurilt algavad kaks klemmi ja tekitavad kaks väljundtakistust R1 ja R2. Joonise 5.7 b kõveratelt on näha, kuidas need takistused muutuvad. Tunnusjooned ![]() ja
ja ![]() on lineaarsed ning Rp on reostaadi kogutakistus.
on lineaarsed ning Rp on reostaadi kogutakistus.
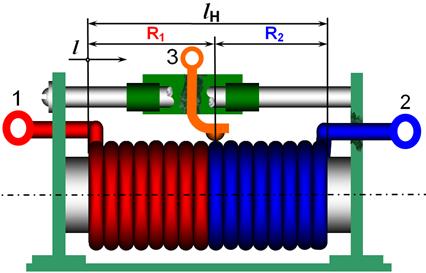
a
b
Joonis 5.7 Potentsiomeetrilised andurid
Toodetakse ka funktsionaalseid reostaate, mille tunnusjoon on tahtlikult mittelineaarne. Selle võib saavutada karkassi sobiva kujuga (joonis 5.8), sobiva keerdude sammu valikuga või lineaarse reostaadi osade takistitega lühistamisega.
a
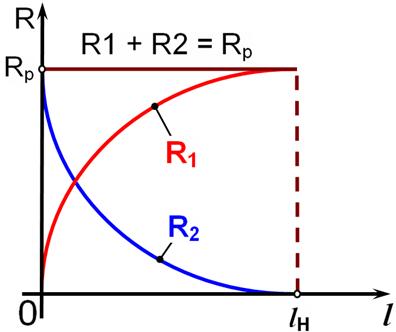
b
Joonis 5.8 Potentsiomeetrilised andurid
Mehaaniliste kontaktideta potentsiomeetrilised andurid
Nad võivad põhineda erinevatel efektidel. Nende peamiseke eeliseks on kontaktpindade hõõrdumise ja kulumise puudumine. Need on kontaktivabad muundurid.
- Fotoefektil põhinevad potentsiomeetrid (pöördpotentsiomeeter optilise ühendusega)
Fototundliku kihi takistus väheneb järsult valguse mõjul (joonis 5.9).
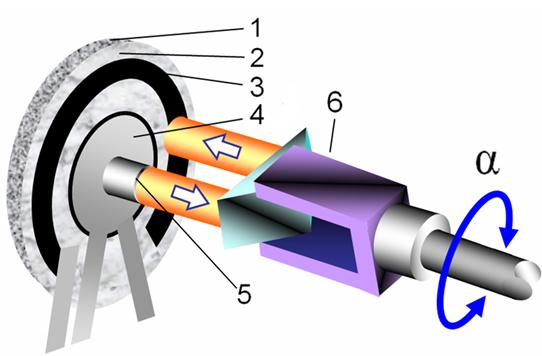
1 – fikseeritud ketas; 2 – juhtivast materjalist rõngas (kontaktiala); 3 – fototundlik rõngas (ala); 4 – takistusala (mõõteala); 5 – valgusdiood. See väljastab valguskiire; 6 – pöörlev element. Selle kohale on paigutatud kaks üksteise suhtes täisnurga all asuvat peeglit
Joonis 5.9 Potentsiomeetriline andur ilma mehaanilise kontaktita [63]
See punkti, kus valguskiir põrkub fototundliku alaga, muutub juhtivaks ja moodustab sel viisil kontakti tsoonides 4 ja 2. Valguskiir on niisiis liuguri rollis.
Magnetilised potentsiomeetrid
Neis kasutatakse magnettakisteid. Need on takistid, mille väärtus muutub magnetvälja mõjul. Kui selline takisti asub magnetväljas, siis tema takistus suureneb järsult.
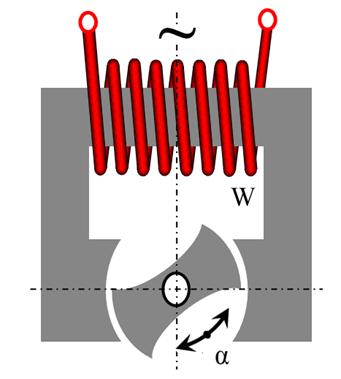
Magnetpotentsiomeetri ehitus (joonis 5.10) koosneb poolketta kujulisest kambrist, millesse sisenevad kaks magnettakistit R 1 ja R 2. Selle ketta ülemisele ja alumisele pinnale on paigutatud magnetpoolused, mis tekitavad magnettakistitega lõikuva magnetvälja. Punkt 3 on neile ühine. Kui ketast pööratakse, siis R 1 ja R 2 muutuvad erinevates suundades. Mida suurem osa magnettakistist on kaetud magnetväljaga, seda suurem on takistus. Joonis 5.11 kujutab takistuse R muutust sõltuvalt nurkhälbest ![]()
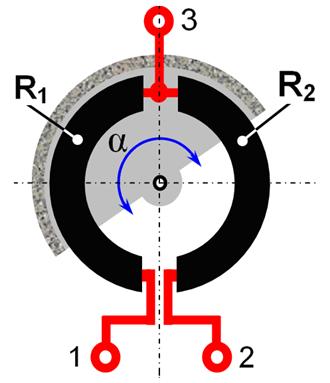
Joonis 5.10 Magnetiline potentsiomeeter [63]
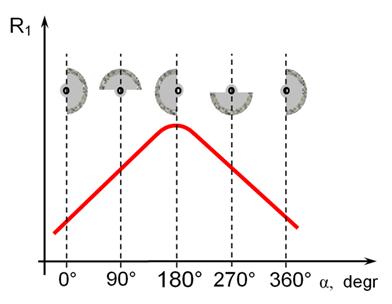
Joonis 5.11 Magnetiline potentsiomeeter tööpõhimõte
- 0 ° – ketas katab R 2 ja taksitusel R< 1 on miinimumväärtus;
- 90 ° – takistusel on keskmine väärtus ja R 1 =R 2;
- 180 ° on maksimaalväärtusega;
- 270 ° – takistusel on jälle keskmine väärtus ja R =R 2;
- 360 ° – takistus R on jälle minimaalväärtusega;
Induktiivsed ja vastastikku induktiivsed andurid
Induktiivandurid koosnevad induktiivpoolist, mis on paigutatud õhupiluga magnetsüdamikule. Pooli parameetrid sõltuvad sisendsuurusest, milleks tavaliselt on lineaarne või nurknihe vm suurus, mis on muudetud nihkeks.
Sisendsuuruse Х, mõjul muutuvad õhupilu parameetrid (selle pikkus ![]() või pindala s) ja seega – muutub õhupilu ja kogu pooli magnetahela takistus. Selle tulemusena muutub pooli induktiiv- ja näivtakistus.
või pindala s) ja seega – muutub õhupilu ja kogu pooli magnetahela takistus. Selle tulemusena muutub pooli induktiiv- ja näivtakistus.
Kogu magnetiline takistus on ![]() (5.5)kus
(5.5)kus ![]() on õhupilu magnetiline takistus,
on õhupilu magnetiline takistus, ![]() on pooli (tavaliselt lehtterasest) magnetsüdamiku magnetiline takistus.
on pooli (tavaliselt lehtterasest) magnetsüdamiku magnetiline takistus.
Kuna magnetiline kogutakistus on määratud õhupilu takistusega ( ![]() ), siis
), siis 
![]() >on õhupilu pikkus,
>on õhupilu pikkus, ![]() on magnetiline konstant (vaakumi magnetiline läbitavus), s on õhupilu ristlõike pindala.
on magnetiline konstant (vaakumi magnetiline läbitavus), s on õhupilu ristlõike pindala.
Need muundurid töötavad vahelduvvooluga ja pooli näivtaksitus on ![]()
![]() on selle nurksagedus
on selle nurksagedus ![]() ja f on sagedus.
ja f on sagedus.
Kuna ![]() kehtib poolile, siis
kehtib poolile, siis  (5.8)
(5.8)
Järelikult, kui ![]() ja s muutuvad, muutub ka pooli takistus. Seetõttu kasutatakse muunduri ehitusi, kus muutub üks kahest parameetrist.
ja s muutuvad, muutub ka pooli takistus. Seetõttu kasutatakse muunduri ehitusi, kus muutub üks kahest parameetrist.
On võimalik välja töötada nii üksikuid kui diferentsiaalandureid. Lähtudes ülekandefunktsioonist (5.8),![]() on üksikutel muunduritel mittelineaarne ja
on üksikutel muunduritel mittelineaarne ja ![]() on lineaarne.
on lineaarne.
Diferentsiaalmuundurid võimaldavad laiendada tundlikkust, parandada muundusfunktsiooni lineaarsust, aga ka vähendada vigade määra.
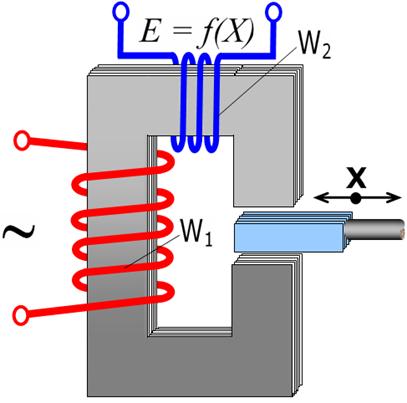
Iga induktiivse muunduri võib muuta vastastikkus induktiivseks (trafo- muunduriks), kui magnetsüdamikule paigutada teine (mõõte) mähis, milles indutseeritaks elektromotoorjõud. Esimest mähist nimetatakse ergutusmähiseks. Diferentsiaalanduritel on lisatud kaks täiendavat sekundaarmähist.
Üksikmuundurites kahe mähise vastastikune induktiivsus M on  (5.9) Muunduri sekundaarmähises indutseeritud elektromotoorjõud (e.m.j.) on
(5.9) Muunduri sekundaarmähises indutseeritud elektromotoorjõud (e.m.j.) on ![]() (5.10) Järelikult, kui
(5.10) Järelikult, kui ![]() või s muutuvad, muutub ka indutseeritud e.m.j. Sõltuvus
või s muutuvad, muutub ka indutseeritud e.m.j. Sõltuvus ![]() on mittelineaarne ja
on mittelineaarne ja ![]() on lineaarne.
on lineaarne.
Mõõtemuundurite ehitus
Muutuva õhupiluga magnetsüdamikuga muundurid 
Need on enimkasutatavad induktiivmuundurid. Joonisel 5.12 on kujutatud seda tüüpi üksik induktiivmuundur.
1 – magnetsüdamik; 2 – ankur; 3 – mähis
Joonis 5.12 Induktiivmuundur [63]
Ankur liigub sisendsuuruse Х mõjul ja tekitab õhupilu muutuse ![]() ning vastavalt (5.8-le) – ka mähise näivtakistuse muutuse.
ning vastavalt (5.8-le) – ka mähise näivtakistuse muutuse.
Joonisel 5.13 kujutatakse diferentsiaalset induktiivmuundurit, millel muutub ![]()
Joonis 5.13 Diferentsiaalne induktiivmuundur [63]
Joonised 5.14 ja vastavalt 5.15 kujutavad vastastikku induktiivset üksik- ja diferentsiaalmuundurit õhupilu ![]() muutmisega lineaarnihkega.
muutmisega lineaarnihkega.
Joonis 5.14 Üksik diferentsiaalne induktiivmuundur [63]
Joonis 5.15 Diferentsiaalne induktiivmuundur [63]
Muutuva õhupilu pindalaga magnetsüdamikuga muundurid
Joonis 5.16 kujutab üksik-induktiivmuundurit ja joonis 5.17 kujutab seda tüüpi induktiivset diferentsiaalmuundurit.
Üksik-induktiivmuundur joonisel 5.16а töötab lineaarnihkele. Sisendsuuruse X mõjul ankur liigub vasakule või paremlae ja sedasi suurendab või vähendab pindala s.
a
b
Joonis 5.16 Muutuva õhupilu pindalaga magnetsüdamikuga muundur [63]
Üksik-induktiivmuundur joonisel 5.16b töötab nurknihkele.
Diferentsiaalne induktiivandur (joonis 5.17) töötab nurknihkele, mis tekitab muutused õhupilude pindalades s1 ja s2.
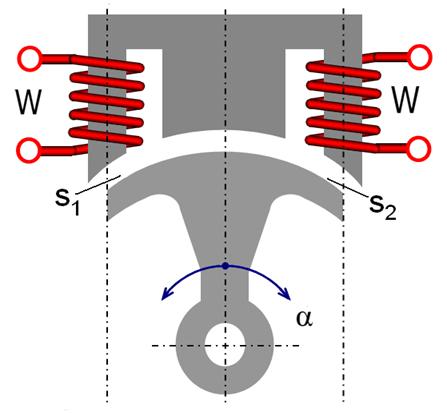
Joonis 5.17 Diferentsiaalne induktiivandur [63]
Joonis 5.18 Iinduktiivandur lineaarnihke mõõtmisek
Joonis 5.19 Iinduktiivandur nurknihke mõõtmiseks [63]
Joonis 5.18 kujutab üksikut vastastikku induktiivset muundurit lineaarnihke mõõtmiseks ja joonis 5.19 kujutab diferentsiaalset vastastikku induktiivset muundurit nurknihke mõõtmiseks õhupilu pindala muutmisega.
Liikuva südamikuga mõõtemuundurid
Joonisel 5.20 on kujutatud induktiivse üksiku liikuva südamikuga muunduri skeem. Seda kasutatakse suuremate nihete mõõtmiseks (kuni mõned mm-d).
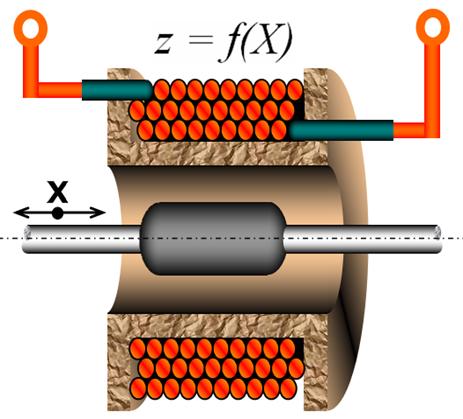
Joonis 5.20 Liikuva südamikuga mõõtemuundur [63]
Seda tüüpi diferentsiaalmuundur on kujutatud joonisel 5.21. [63]
Kui ankur liigub, siis ühe mähise induktiivsus suureneb ja teisel väheneb. Mõlemad mähised on ühendatud vahelduvvoolusilla vastasõlgadesse.
Kui muundurile lisada ergutusmähis W1 ja vaadeldud mähiseid W2kasutada mõõtmiseks siis muundur muutub vastastikku induktiivseks, mida sageli nimetatakse ka lineaarselt muutuvaks diferentsiaaltrafoks (LVDT). Seda saab toota erinevate lahendustega (joonis 5.22 а ja b).
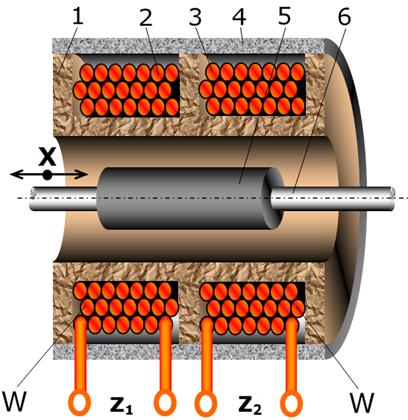
1 – isoleerivast materjalist karkass; 2 ja 3 – ühesuguse keerdude arvuga mähised W; 4 – fikseeritud ferromagnetiline silinder; 5 – ferromagnetilisest materjalist liikuv südamik; 6 – mittemagnetilisest materjalist juhikud (messing)
Joonis 5.21 Lineaarselt muutuv diferentsiaaltrafo (LVDT) [63]
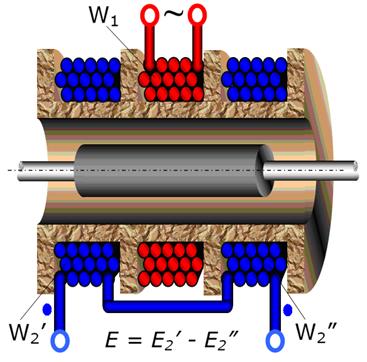
a
b
Joonis 5.22 Lineaarselt muutuv diferentsiaaltrafo erinevad lahendused [63]
Mahtuvuslikud mõõtemuundurid
Mahtuvuslikeks nimetatakse mõõtemuundureid, milles mõõdetav mitte-elektrilise suuruse muutuse muundatakse mahtuvuse muutuseks.
Arvestamata ääreefekti on paralleelsete plaatelektroodidega kondensaatori mahtuvus C määratud avaldisega
![]() (5.11) kus
(5.11) kus ![]() on elektroodide vahelise keskkonna dielektriline läbitavus, s on nende pindala,
on elektroodide vahelise keskkonna dielektriline läbitavus, s on nende pindala,![]() on nende vahekaugus,
on nende vahekaugus,![]() =8.854х10-12 F/m on vaakumi dielektriline läbitavus,
=8.854х10-12 F/m on vaakumi dielektriline läbitavus, ![]() on elektroodide vahelise aine suhteline dielektriline läbitavus (õhul
on elektroodide vahelise aine suhteline dielektriline läbitavus (õhul ![]() = 1.0006).
= 1.0006).
Seega mahtuvuse väärtust C saab muuta ![]() , s ja
, s ja ![]() abil. Muundusfunktsioon
abil. Muundusfunktsioon ![]() on mittelineaarne ja muundusfunktsioonid
on mittelineaarne ja muundusfunktsioonid ![]() ja
ja ![]() on lineaarsed.
on lineaarsed.
Mahtuvuslikud muundurid lineaarnihke mõõtmiseks muutmisega
Joonis 5.23 kujutab üksikut mahtuvuslikku muundurit ![]() muutmisega.
muutmisega.
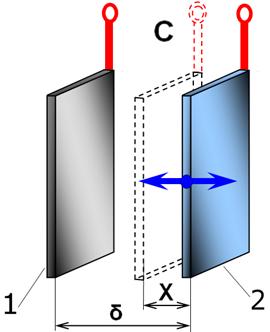
1 – fikseeritud elektrood; 2 – liikuv elektrood
Joonis 5.23 Mahtuvuslikud muundur lineaarnihke mõõtmiseks [63]

(5.12)
See muundur on tuntud kitsa lineaarsuspiirkonna poolest.
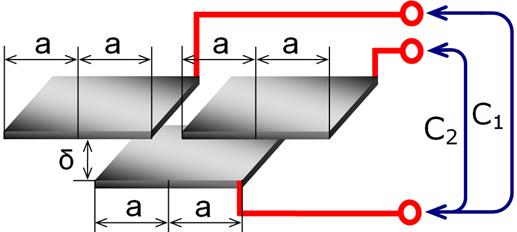
Joonis 5.24 kujutab diferentsiaalmuundurit.
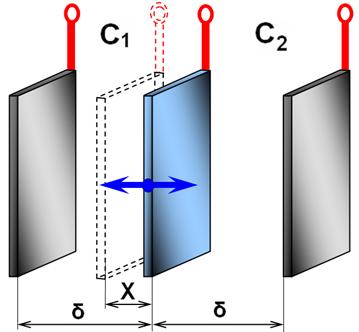
Joonis 5.24 Mahtuvuslik diferentsiaalmuundurit [63]
Võrrandid
(5.13)
(5.14)
kehtivad seda tüüpi muunduritele.
Mahtuvuslikud muundurid s muutmisega lineaar- ja nurknihke mõõtmiseks
Joonis 5.23 kujutab üksikut mahtuvuslikku muundurit, milles muutub s lineaarnihke mõõtmiseks.
Joonis 5.25 Mahtuvuslik lineaarnihkeandur
(5.15)
Kui elektrood liigub, siis mahtuvus väheneb alati, sõltumata nihke x suunast. See puudus on kõrvaldatud mahtuvuslikus diferentsiaalmuunduris (joonis 5.26).
Joonis 5.26 Mahtuvuslik lineaarnihkeandur
(5.16)
(5.17)
Joonis 5.27 kujutab üksikut mahtuvuslikku muundurit s muutmisega nurk nihkele ja joonisel 5.28 on kujutatud sama tüüpi diferentsiaalne muundur.
Joonis 5.27 Mahtuvuslik nurknihke andur
![]() (5.18)
(5.18)
Joonis 5.28 Mahtuvuslik nurknihke andur
(5.19)
(5.20)
Laialdaselt kasututakse ka silindrilisi (koaksiaalseid) kondensaatoreid (joonis 5.29).
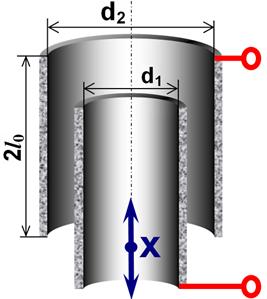
Joonis 5.29 Mahtuvuslik kondensaatorandur
Nende mahtuvus on määratud valemiga
(5.21)
kus ![]() on kahe elektroodi ülekatte pindala ja d1 ning d2 on sise- ja väliselektroodi läbimõõdud.
on kahe elektroodi ülekatte pindala ja d1 ning d2 on sise- ja väliselektroodi läbimõõdud.
Nendes muundurites võivad liikuda nii sisemised kui välimised silindrid.
Selle muunduri võib muuta diferentsiaalseks kolmanda silindri lisamisega, jättes ainult ühe silindri liikuvaks (joonis 5.30).
(5.22)
(5.23)
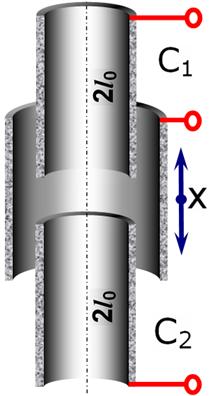
Joonis 5.30 Mahtuvuslik kondensaatorandur
Dielektrilise läbitavuse muutmisega mahtuvuslikud muundurid  väikeste nihete ja tasemete mõõtmiseks
väikeste nihete ja tasemete mõõtmiseks
Selline muundur on kujutatud joonisel 5.31.
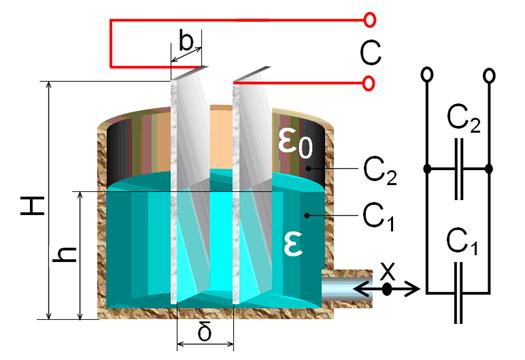
Joonis 5.31 Dielektrilise läbitavuse muutmisega mahtuvuslik muundur [63]
Kasutades paralleelsetest plaatides elektroode laiusega b, võib mahtuvusliku muunduri joonis 5.39 kohta kirjutada

(5.24)
(5.25)

(5.26)
kus C on kondensaatori mahtuvus dielektrikuga – vedelik või tahke materjal, C 2 on vastava õhkkondensaatori mahtuvus vedeliku pinna või tahke aine kohal. Kaks kondensaatorit on ühendatud rööbiti.
Sarnase valemiga võib väljendada silindrilise kondensaatori (joonis 5.33) mahtuvust
(5.27)
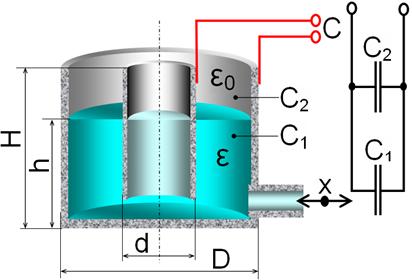
Joonis 5.32 Silindrilise kondensaatori mahtuvuse muutmine [63]
Mõlemaid muundureid (joonised 5.31 ja 5.32) saab kasutada väikeste nihete X ja vedelikunivoo ning ühest suurema dielektrilise läbitavusega ![]() tahkete materjalide taseme mõõtmiseks.
tahkete materjalide taseme mõõtmiseks.
Muundamine ![]() on mõlemal juhul lineaarne.
on mõlemal juhul lineaarne.
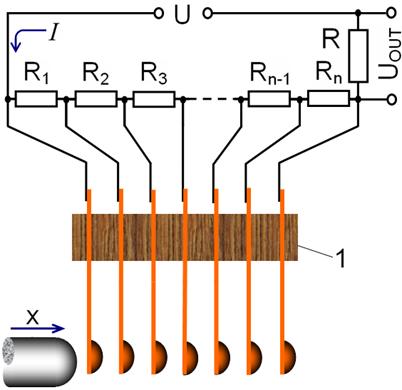
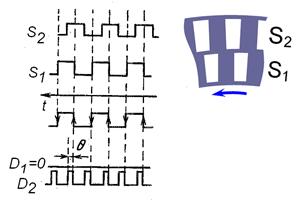
Absoluutenkooderid
Lineaarse või nurknihke mõõtmiseks on võimalik välja töötada muundur, mille väljundsignaal on otseselt digitaalne.
Absoluutenkooderid võivad olla lineaarsed (joonis 5.33а) või pöörlevad (võlliga) (joonis 5.33b). Joonisel 5.33 on sellised kahendkoodiga enkooderid.
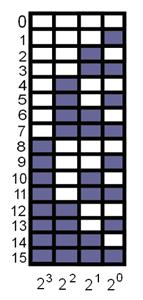
a
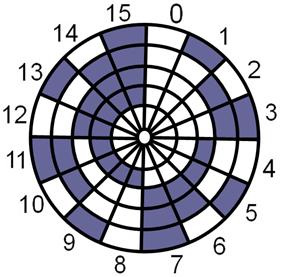
n = 4
b
Joonis 5.33 Absoluutenkooderid
Kõik n bitti, mis moodustavad sõna, on moodustatud vastavalt n paralleelsele või kontsentrilisele rajale, kasutades loogilise 0 või 1 määramiseks kahte erinevat olekut:
- mittemagneetuv või ferromagnetiline pind – magnetiliseks lugemiseks;
- isoleeriv või juhtiv pind – elektriliseks lugemiseks;
- läbipaistmatu või läbipaistev pind – optiliseks lugemiseks.
Optilist lugemist kasutatakse väga sageli ja igale rajale on allikas – elektromagnetiline diood ja vastuvõtja – fototransistor.
Elementide arv N igal rajal määrab resolutsiooni:
- lineaarenkooderitel pikkusega L see on L /N
- pöördenkooderitel see on 360 °
Vahetu kahendkoodi saamiseks tuleb saadud infot töödelda arvutusseadmega. Siiski, kuna teatud kahendarvude muutmisel ühe võrra võib korraga muutuda mitu bitti, võib tekkida lugemisviga.
Vale lugemit saab vältida järgnevatel viisidel:
- kood, milles elementaarnihkel muutub ainult üks bitt (tavaliselt need on spetsiaalsed koodid, näiteks Gray kood);
- otsene kahend- või BCD-kood täiendava lugemisseadisega, mis võimaldab vältida mitmetähenduslikku lugemit üleminekutsoonides (kasutatakse kaherajalisi koodikandjaid). Selle näiteks on U-kujuline salvestis.
Optilised muundurid
5.6.1. Optilised asendimuundurid
Sellise muunduri lihtsustatud skeem on näidatud joonisel 5.34.
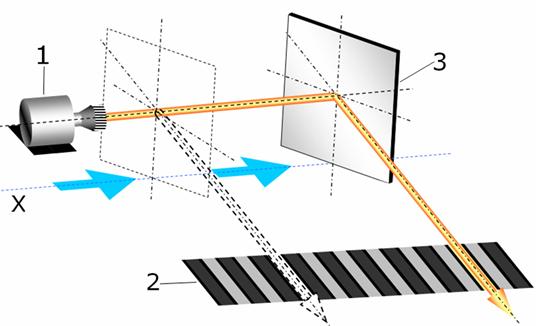
1 – laser; 2 – fotodioodid; 3 – barjäär
Joonis 5.34 Optiline asendimuundur [63]
Valgusallikaks kasutatakse laserit. Laserkiir peegeldub barjäärilt, mis liigub koos objektiga, mille asendit määratakse. Peegeldunud kiir satub vastavatesse kiirgust vastu võtvatesse fotodioodidesse.
Optilised (suhtelised) inkrementaalenkooderid
Nendega saab määrata objekti nihkeid, aga ka pöörlemiskiirust, kasutades paari rada (2 või 3), mis on vähem keeruka maskiga, võrreldes absoluutenkooderitega.
Kaks kontsentrilist (pöördenkooderil) või rööbitist rada (lineaarenkooderil) on jaotatud N võrdseteks vahelduvateks läbipaistmatuteks ja läbipaistvateks elementideks (sammudeks). Ühel radadest on elemendid teise suhtes nihutatud veerandi sammu võrra (Т/4). Vahel lisatakse kolmas rada (millel on ainult üks läbipaistev element), mis võimaldab pöörete loendamist ja loenduri nullimist (joonis 5.35).
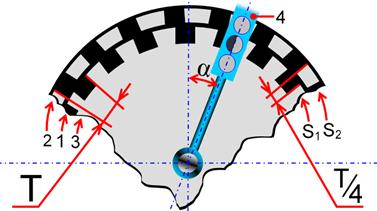
Joonis 5.35 Optiline inkrementaalenkood
Iga rada loetakse optilise paariga: valgusallikas (valgusdiood) ja vastuvõtja (fototransistor), on paigutatud ketta (laua) vastaskülgedele.
Nihke suuna määramiseks kasutatakse elektroonikaskeemi. See võimaldab alates raja 1 signaalist S tunda ära nende tõusvaid {># ![]() või laskuvaid $
või laskuvaid $ ![]() külgi ning sõltuvalt teise raja signaali S2 olekust (0 või 1) samal hetkel (joonis 5.36).
külgi ning sõltuvalt teise raja signaali S2 olekust (0 või 1) samal hetkel (joonis 5.36).
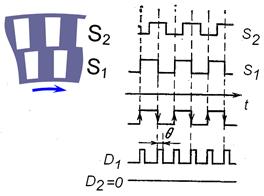
Joonis 5.36 Optiline inkrementaalenkood
Püsimagnetmuundurid
Nende muundurite töö põhineb elektromagnetilise induktsiooni seadusele.
Nad koosnevad püsimagnetist (vahel elektromagnetist) ja mähisest. Sisendsuuruse, mis võib olla lineaarne või nurkliikumine, muutus kutsub esile mähise aheldusvoo muutuse, mille tulemusena indutseeritakse mähises sisendsuuruse muutusega võrdeline elektromotoorjõud. Need on generaatoritüüpi muundurid.
Indutseeritud e.m.j. on määratud avaldisega

(5.28)
kus ![]() on magnetvoo muutuse väärtus. See väärtus sõltub sisendsuuruse muutuse suurusest.
on magnetvoo muutuse väärtus. See väärtus sõltub sisendsuuruse muutuse suurusest.
Arvestades sõltuvust (5.28), kehtib siinuselisele magnetvoole
(5.29)
indutseeritud elektromotoorjõu väärtuseks saame

(5.30)
Indutseeritud e.m.j. sõltub magnetvälja muutumise kiirusest. Sellest väärtusest sõltub ka tema sagedus lineaarnihkele.
Püsimagnetmuundurite tüübid
Püsimagneti ja väljundsuuruse poolt mõjutatava mähise vastastikuse asendi põhjal. See tüüp on jaotatud kaheks täiendavaks alamtüübiks:
- fikseeritud magneti ja liikuva mähisega;
- fikseeritud mähise ja liikuva magnetiga;
- fikseeritud magneti ja mähisega, kus vastavalt sisendsuurusele muutub kolmanda komponendi asend.
Liikuva mähisega püsimagnet-muundurid
– nurga nihkele
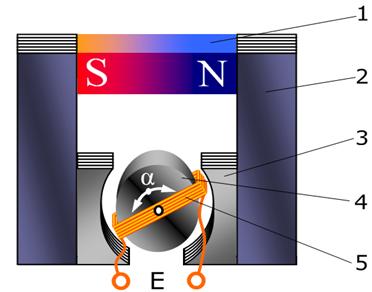
>1 – püsimagnet; 2, 3, 4 – ferromagnetilised elemendis; 5 – mähis, mis pöörleb sisendsuuruse mõjul
Joonis 5.37 Liikuva mähisega püsimagnet-muundur [63]
1 – mittemetalliline mähisekarkass; 2 – liikuv mähis, mis on seotud sisendsuuruse muutustega; 3 – püsimagnet; 4 – magnetsüdamik
Joonis 5.38 Liikuva mähisega püsimagnet-muunduri tööpõhimõte
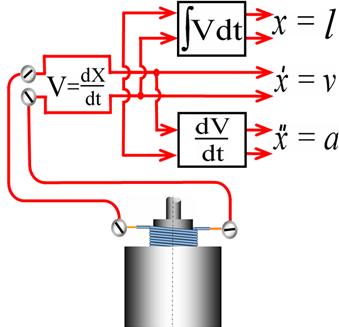
Indutseeritud e.m.j. on võrdeline kiirusega ![]() Kasutades integreerivat või diferentseerivat muundurit, võib väljundis saada signaali, mis on võrdeline vastavalt nihkega X või kiirendusega a
Kasutades integreerivat või diferentseerivat muundurit, võib väljundis saada signaali, mis on võrdeline vastavalt nihkega X või kiirendusega a
Püsimagnet-muundurid liikuva magnetiga
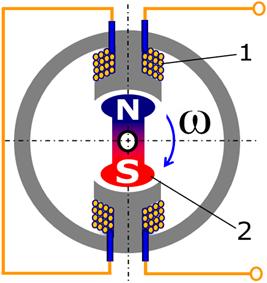
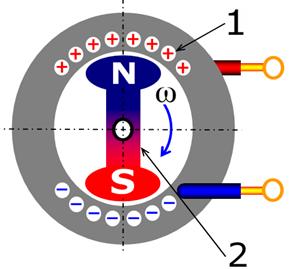
1 – mähis; 2 – püsimagnet
Joonis 5.39 Püsimagnet-muundur liikuva magnetiga
Sellisel juhul saame sarnaselt, et indutseeritud e.m.j. on võrdeline nurkkiirusega, s. t.

kus S w on nurkkiirus.
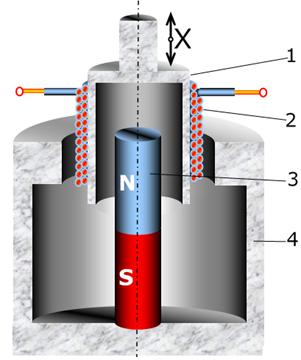
Püsimagnet-muundurid, mis põhinevad kolmanda elemendi liikumisele
Muunduri püsimagnet ja mähis on statsionaarsed.
lineaarnihkele (joonis 5.40)
Magnetsüdamik on silindrilise kujuga. Mähis on kinnitatud silindrilise osa keskele, mis on püsimagnet. Ferromagnetiline element (ankur) liigub magneti ja magnetsüdamiku vahelises pilus. Kui ankur liigub, siis õhupilu magnetiline takistus muutub, mis tekitab magnetvoo muutuse.
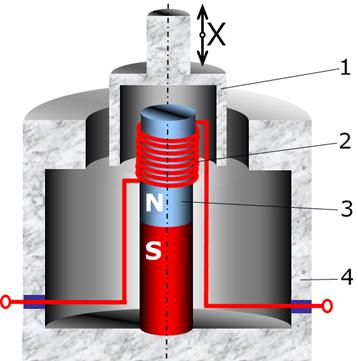
1 – liikuv ferromagnetiline element; 2 – mähis; 3 – püsimagnet; 4 – magnetsüdamik
Joonis 5.40 Püsimagnet-muundur, mis põhinevad kolmanda elemendi liikumisele [63]
pöörlemiskiiruse mõõtmiseks (joonis 5.41)
1 – püsimagnet; 2 – magnetsüdamik; 3 – liikuv element – ülekande ratas; 4 – mähis
Joonis.5.41 Püsimagnet-muundur,pöörlemiskiiruse mõõtmiseks [63]
Püsimagnetvoog Ф on sama, kuid jaotatud erineval viisil kahe samba vahel sõltuvalt faktist: milline osa (hammas või vahekoht) satub vastava samba alla. Õhupilu magnetiline takistus magnetsüdamiku samba ja ratta vahel on minimaalne, kui hammas on samba all ja maksimaalne, kui seal on hammaste vahekoht. Ülejäänud juhtumitel takistuse väärtus on miinimumi ja maksimumi vahel. Sellega muutub diferentsiaalselt ühendatud mähiseid läbiv magnetvoog Ф1 ja Ф2 ja indutseeritakse e.m.j.

(5.32)
mis sõltub ketta pöörlemise nurkkiirusest.
Piesoelektrilised muundurid
Mõjuva jõu võrrandist

(5.33)
kus m on mass ja a on kiirendus, järeldub, et piesomuundureid saab kasutada dünaamiliste (ajas muutuvate) jõudude mõõtmiseks (kuni 104N) ja kiirenduste (kuni 1000 g) mõõtmiseks vahemikus 0,5 kuni 100 Hz. Kui kasutatakse täiendavalt ühte või kahte integreerivat elementi, siis võib mõõta teisi liikumisparameetreid: kiirused või аmplituudid (näiteks. vibratsiooni parameetrid: vibratsiooni amplituud, kiirus ja kiirendus).
2.7. VOOLUHULGA ANDURID
Termin vooluhulk tähendab vedelike või gaaside liikumist torudes või avatud kanalites. Seda iseloomustavateks parameetriteks on vooluhulk ja voolamiskiirus.
Vooluhulk on aine kogus – vedelik või gaas, mis läbib torusid või avatud kanaleid kindla ajavahemiku jooksul. Vedelike või gaaside vooluhulga mõõtmise ühikud tuginevad aine mahule või kaalule teatud ajavahemiku jooksul.
Ruumala põhiühik on m3/s, mis määrab läbiva gaasi või vedeliku ruumala ajaühikus. Lisaühikuna võidakse kasutada l/s, mis määrab läbiva gaasi või vedeliku ruumala liitrites. Vedeliku vooluhulga saab arvutada voolamiskiiruse ja läbitava toru või kanali ristlõike pindala korrutisega.
Vooluhulga kaalu mõõtmiseks kasutatakse ühikut kg/s. See määrab läbiva vedeliku või gaasi kaalu (kilogrammides) ajaühikus.
Teised ühikud vooluhulga mõõtmiseks on ft3/s (kuuptolli sekundis) ning ka lb/s (naela sekundis).
Pöörlevad vooluhulga andurid
Pöörlevates vooluhulga andurites muundatakse propelleri või turbiini pöörlev liikumine vooluhulga parameetrite lugemiks. Vooluhulga suurenemisel rootori pöörlemiskiirus suureneb samuti.
Propelleriga vooluhulga andurid
Seda tüüpi vooluhulga muundurid põhinevad vooluga käitaval propelleril (joonis 6.1). Propelleri pöörlemist mõõdetakse anduritega ja seda saab lugeda elektrooniliselt teostatud mõõteahelaga. See on üks odavamaid praktiliselt kasutatavatest vooluhulga muundurite konstruktsioonidest.
1 – propeller, 2- vool
Joonis 6.1 Propelleriga vooluhulga andur [63]
Turbiini ja induktiivmuunduriga andurid
Seda tüüpi andurites on turbiiniga rootor monteeritud toru keskele ja kui aine (vedelik või gaas) liigub, paneb see turbiini pöörlema (joonis 6.2).
1 – mittemagnetilisest materjalist toru;2 – turbiin; 3 – ferromagnetiline varras;
4– püsimagnet; 5 – pool
Joonis 6.2
Turbiini on pressitud ferromagnetiline varras. Torust väljapoole selle vahetusse lähedusse on paigutatud püsimagnet. Magneti ümber on paigutatud mõõtemähis. Püsimagnet tekitab magnetvoo, mis on maksimaalne, kui varras on sellega paralleelne ja minimaalne, kui varras on risti. Magnetvoo muutuse tulemusena indutseeritakse mõõtemähises e.m.j., mis on võrdeline turbiini pöörlemiskiirusega

(6.1)
ja vastavalt – voolukiirusega. Selle kiiruse alusel saab arvutada aine vooluhulga.
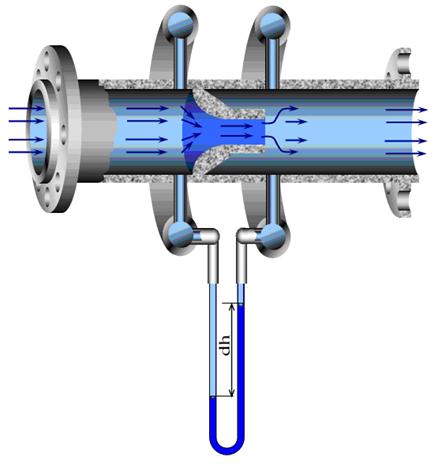
Rõhu mõõtmisel põhinevad vooluhulga andurid
Kalibreeritud piluga
Kalibreeritud pilu on vedeliku või gaasi voolu suunas laienev avaga metalldiafragma (joonis 6.3). See on paigaldatud voolusuunaga risti. Pilu mõlemal poolel on mõõteavad, mis näitavad rõhku enne ja pärast pilu. Voolu väärtus määratakse rõhkude vahe alusel.
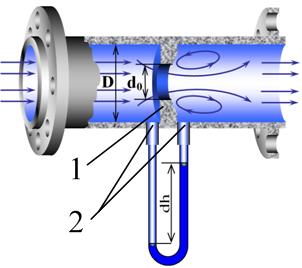
1 – kalibreeritud pilu, 2-mõõteavad
Joonis 6.3 Kalibreeritud piluga vooluhulga andur [63]
Venturi toruga
Venturi toruga voolumõõtja (joonis 6.4) kasutab kalibreeritud piluga sama põhimõtet, nimelt – rõhkude erinevust. Venturi toru tekitab kalibreeritud piluga võrreldes vähem keeriseid. Seetõttu neid ei kasutata suure läbimõõduga torudes. Rõhumõõteavad on paigutatud Venturi toru kõige laiemasse ja kitsaimasse ossa.
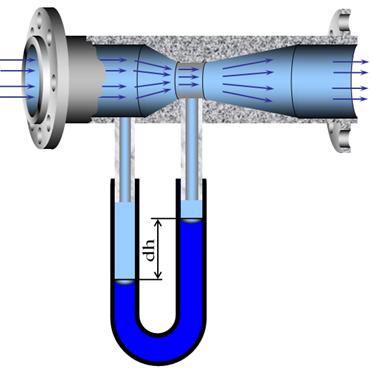
Joonis 6.4 Venturi toru vooluhulga andur [63]
Düüsiga
Seda tüüpi voolumuundur (joonis 6.5) töötab kalibreeritud pilu ja Venturi toruga sarnasel põhimõttel. Düüsi geomeetria on määratud toru diameetriga.
Joonis 6. Düüsiga vooluhulga andur [63]
Ultraheli vooluhulga andurid
Ultraheli vooluhulgaandurid mõõdavad ultrahelisignaali ajalist viivitust voolu läbimisel voolusuunas ja vastuvoolu. Ultrahelisignaali liikumiskiirus vedeliku voolusuunas on kiirem kui vastuvoolu.
Ultraheliga vooluhulga mõõtmiseks kasutatakse järgnevaid meetodeid:
- pideva ultrahelisignaaliga;
- tekitades ultraheli impulsse;
- kasutades Doppleri efekti.
Pideva ultrahelisignaaliga
Pideva ultrahelisignaali kasutamisel tekib faasinihe väljastatava ja tagastuva signaali vahel. Faasinihke alusel määratakse vooluhulga väärtus.
Tekitades ultraheli impulsse
Ultraheli impulssidega mõõtmisel (joonis 6.6) kasutatakse kahte ultraheli impulsside saatjat, mis väljastavad impulsse aine (gaasi) voolusuunas ja vastuvoolu. Mõõdetakse impulsside vastuvõtmise viivitust. Vooluhulga väärtus määratakse impulsside mõlemas suunas vastuvõtmise viivituste erinevuse alusel.
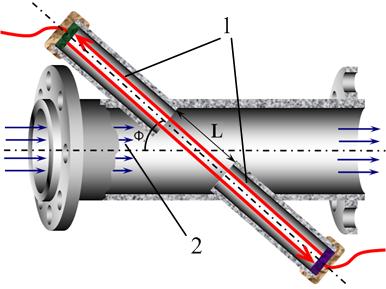
1- ultraheli emitterid-vastuvõtjad, 2- vool [63]
Joonis 6.6 Ultraheli vooluhulga andur
Kasutades Doppleri efekti
Teine tehnika vooluhulga mõõtmiseks kasutab nn Doppleri efekti. Doppleri efekt on vastuvõetava sageduse muutus signaaliallika ja/või vastuvõtja liikumisel üksteise suhtes. Sagedus suureneb, kui allikas ja vastuvõtja lähenevad ja väheneb, kui nad kaugenevad. Sageduse muutus, kui nii allikas kui vastuvõtja liiguvad, avaldub järgmise valemiga:
 kus f’ on vastuvõetud sagedus, f on väljastatav sagedus, v on heli kiirus ning v0 ja vs on vastavalt vaatleja ja allika kiirused.
kus f’ on vastuvõetud sagedus, f on väljastatav sagedus, v on heli kiirus ning v0 ja vs on vastavalt vaatleja ja allika kiirused.
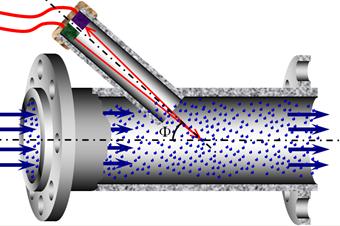
Joonis 6.7 Ultraheli vooluhulga andur kasutades Doppleri efekti [63]
Selle meetodiga (joonis 6.7) tehakse kindlaks ultraheli peegeldumine voolavatelt osakestelt. Osakesele langemisel ultrahelisignaal peegeldub ja tema sagedus muutub. Voolamiskiiruse kindlaksmääramiseks kasutatakse sageduse muutust. Selle meetodi puuduseks on võimaliku mõõtevea kasv osakeste arvu suurenemisel.
Magnet-induktiivsed vooluhulga andurid
Magnet-induktiivsed vooluhulga andurid (joonis 6.8) põhinevad magnetväljas risti jõujoontega liikuva kindla pikkusega l voolujuhis tekkivale elektromotoorjõule. Sel juhul vedelik täidab liikuva voolujuhi rolli. Vedelik peab olema elektrit juhtiv. Toru mõlemale küljele on paigutatud elektroodid, mis praktiliselt määravad voolujuhi pikkuse l. Indutseeritud pinge on võrdeline aine kiirusega. Seda tüüpi andurid on täpsed aga kallihinnalised.
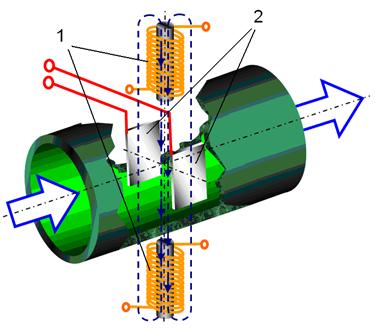
1- induktsioonpoolid; 2 – elektroodid
Joonis 6.8 Magnet-induktiivsed vooluhulga andur [63]
Kalorimeetrilised vooluhulga andurid
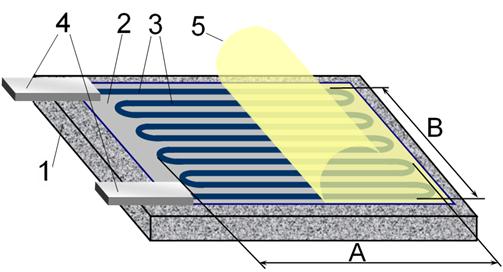
Meetod põhineb küttekeha tekitatud temperatuuri levimisele. Temperatuuri mõõdetakse küttekeha suhtes sümmeetriliselt paigutatud kahe anduriga (joonis 6.9). Vedeliku või gaasi liikumine on võrdeline kahe anduri näitude erinevusega. Tööpõhimõte hõlmab suure mõõtetäpsuse tagamiseks aine temperatuurikompensatsiooni.
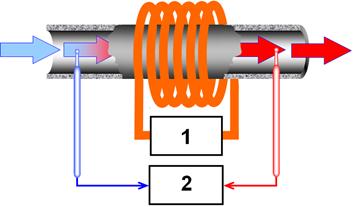
1– küttekeha juhtimine; 2 – mõõteseade;
Joonis 6.9 Kalorimeetrilised vooluhulga andur [63]
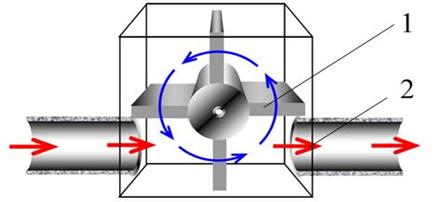
Vooluhulga keerisandurid
Vooluhulga keerisandurid (joonis 6.10) põhinevad keeriste tekkimisele vedelikes või gaasides aine voogu paigutatud barjääri mõjul. Nad ei sisalda liikuvaid osi, mis on eeliseks mõnedes rakendustes. Keeriste sagedus ja hulk on võrdeline vooluhulgaga. Sellisel meetodil teostatud mõõtemuundurid on sobivad suuremate vooluhulkade mõõtmiseks, kuid väikeste vooluhulkade juures on viga suurem.
Keeriste arvu saab mõõta, kasutades termistore, ultraheli- ja optilisi andureid, samuti ka tensoandureid, mahtuvuslikke ja piesoelektrilisi andureid.
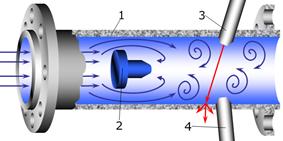
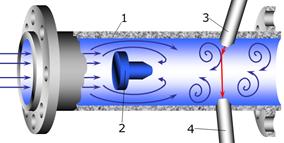
1- voolusuund; 2- barjäär; 3, 4 – andurid keeriste mõõtmiseks
Joonis 6.10 Vooluhulga keerisandur [63]
Vooluhulga andurid avatud kanalitele
Praktikas on sageli tarvis mõõta vedeliku voolu avatud kanalites. Sel juhul kasutatakse peamiselt kahte meetodit:
ülejooksuteega (spillway) (joonis 6.11a);
kanaliga (flume) (joonis 6.11b);
a b
1 – ülejooksutee, 2- tasemeandur, 3- ava (chute), 4- kanal
Joonis 6.11 Vooluhulga andurid avatud kanalitele [63]
2.8. NIISKUSANDURID
Niiskuse väärtus mõjutab oluliselt paljusid tootmisprotsesse. Atmosfääriõhu või protsessigaasi niiskus on üks olulisi parameetreid, mis mõjutab toodangu kvaliteeti paljudes tehnoloogilistes protsessides. Seetõttu on gaaside niiskuse mõõtmisel suur tähtsus ja see on tööstuses laialdaselt kasutusel.
Niiskuse põhimääratlused
Gaaside niiskuse kvalitatiivseks määratlemiseks kasutatakse erinevaid ühikuid.
Absoluutne niiskus (veeauru tihedus), d w . See väljendab veeauru massi gaasi mahuühikus. Absoluutset niiskust mõõdetakse grammides kuupmeetrile (g/m<3).
Veeauru osarõhk, p w . See on veeauru rõhk õhus mõõdetuna antud temperatuuril. Seda väljendatakse rõhuühikutes (harilikult hektopaskalites, hPa).
Niiskuse mahusisaldus (veeauru mahukontsentratsioon), Сv . See on määratud kui veeauru mahu ja gaasi mahu suhe. Niiskuse mahusisaldust kasutatakse väga väikeste veeauru koguste iseloomustamiseks. Seda mõõdetakse ppm-ides (osakest miljoni kohta).
Suhteline niiskus, Н(RH). Veeauru osarõhu suhe küllastunud veeauru rõhusse antud temperatuuril. Gaasi küllastuse määr Н iseloomustab gaasi küllastust veeauruga ja seda rakendatakse palju erinevatel teaduse ja tehnoloogia aladel. Suhtelist niiskust mõõdetakse protsentides (0 >£ Н.
Kastepunkti temperatuur, Тр. See on temperatuur, mille juures veeauru osarõhk on maksimaalne. Kastepunkt on temperatuur, mille juures õhu suhteline niiskus on 100%. Kastepunkti kasutatakse veeauru kondenseerumise mõõtmiseks tööstusprotsessides kõrgetel temperatuuriedel.
Temperatuuri-gradiendil põhinevad niiskusandurid
Psühromeetrilised niiskusandurid
Psühromeetrilist meetodit kasutatakse gaasi (peamiselt õhu) suhtelise niiskuse mõõtmiseks temperatuuridel üle 273К ja see põhineb kuiva ja niiske termomeetri näitude sõltuvusele õhuniiskusest. Niiske termomeetri näit sõltub niiskelt pinnalt vee aurustumise intensiivsusest.
Rida mõjureid: termomeetri täpsus, niisket termomeetrit ümbritsev õhuvoog, termomeetrite vastastikune asetus jne. mõjutavad meetodi täpsust ja töökindlust. Temperatuuritundlike elementidena kasutatakse termopaare, termistore, dioode jne.
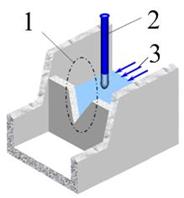
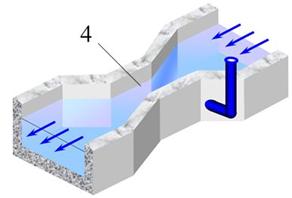
Kondensatsioon-niiskusandurid
Kondensatsiooni meetod põhineb jahutatud tahkel pinnal veeauru kondenseerumistemperatuuri ning veeauru kontsentratsiooni suhtele. Selle meetodi eelisteks on analüüsitava keskkonna niiskuse mõõtmine laias veeauru kontsentratsiooni, temperatuuri ja niiskuse vahemikus ning anduri kalibreerimine temperatuuri, mitte niiskuse alusel. Selle meetodi teostamisel tuleb detektori kondenseerivat pinda juhitult jahutada, fikseerides täpselt kondensaadi kihi tekkimise momendi ning samaaegselt registreerida kondenseeriva pinna temperatuur.
Kondensaadikihi tekkimise momendi kindlaksmääramiseks kasutatakse pinna akustilistele lainetele põhinevaid optoelektroonilisi ja elektrilisi tehnikaid.
Liitiumkloriidile põhinevad temperatuurigradiendi andurid
Nende andurite tööpõhimõte põhineb LiCl sisaldava soolalahuse kuumutamisele kuni lahuse aururõhk võrdsustub analüüsitava keskkonna veeauru rõhuga. Teades seda temperatuuri, võib määrata veeauru rõhu ja seega – kond AC voltage is fed to the electrodes and current flows in the solution, heats it and makes water evaporate.;Elektroodidele juhitakse vahelduvvool ja elektrivool liigub lahuses, soojendab seda ning aurustab vett.Pärast vee aurustumist elektroode läbiv vool väheneb järsult, kuna kristallilise LiCl voolujuhtivus on oluliselt madalam kui lahusel. Selle tulemusena anduri temperatuur langeb. Seega tekib tasakaal tahke LiCl ja selle lahuse vahel. See tasakaal tekib otsekohe veeauru rõhuga seotud temperatuuril. Temperatuuri mõõdetakse Pt100 anduriga, mis on anduri osaks. Õhu niiskusesisaldus on määratud selle temperatuuriga.
Imendumisel põhinevad niiskusandurid
Selle suure andurite grupi tööpõhimõte põhineb analüüsitavast meediumist niiskuse imendumise nähtusele. Niiskusesisalduse määramiseks kasutatakse keskkonnaga hüdrodünaamilises tasakaalus oleva tundliku elemendi füüsikalis-keemiliste või elektro-füüsikaliste omaduste muutusel.
{0>Sõltuvalt imendumise tüübile ja mehanismile eristatakse adsorptsiooni, absorptsiooni ja keemilise imendumise niiskusandureid.<}0{>Sõltuvalt imendumise tüübist ja mehhanismist eristatakse adsorptsiooni, absorptsiooni ja keemilise imendumise niiskusandureid.<0}
ensatsioonipunkti temperatuuri. Andur koosneb torust, mis on kaetud LiCl lahuses immutatud kangaga. Toru ümber onmähitud kaks korrosioonikindlast materjalist elektroodi.>Absorptsiooniandurites toimub veeauru imendumine mittepoorsel sorbendil või poorse sorbendi pooride pinnal.;Absorptsiooniandurites toimub veeauru imendumine mittepoorsel sorbendil või poorse sorbendi pooride pinnal.Absorptsiooni tüüpi andurites toimub niiskuse imendumine kogu sorbendi mahus. Absorptsiooni tüüpi andurites toimub niiskuse imendumine kogu sorbendi mahus. Keemilise imendumisega andurites imenduv vesi reageerib keemiliselt sorbendi materjaliga.
Adsorptsiooni ja absorptsiooni andurites kaasneb niiskuse imendumisele sorbendis selle massi ja elektro-füüsikaliste parameetrite, nagu takistuse, mahtuvuse, dielektrilise läbitavuse jne muutus. Sellega seoses on olemas pieso-imendumisandureid sisaldavad gravitatsioonilist tüüpi andurid, mis põhinevad sorbendi massi muutustel, ning impedantsiandurid, mis põhinevad sorbendi kogutakistusele (või ühele selle komponentidest).
Gravimeetrilised (pieso-imendumis-) niiskusandurid
Seda tüüpi andurites muutub niiskuse imendumisel sorbendi mass. Sorbent asetatakse pieso-kvartsresonaatori pinnale, mille tulemusel resonantssageduse muutus on Δf
(7.1)
k us f0 on kvartsresonaatori resonantssagedus, N on sageduskonstant, ρk on piesoelemendi tihedus, S on piesoelemendi pindala, Δm on sorbendi massi muutus.
Pieso-imendumisanduri väljundsignaal on määratud sorbendi imendumisaktiivsusega.
Pieso-kvartsresonaatorite kõrval toodetakse seda tüüpi andureid, mis põhinevadpinna akustilistele lainetele (surface acoustic waves) (SAW). Nende tööpõhimõte kasutab samuti enamasti polümeeri baasil toodetud niiskustundliku kihi massi muutust. Akustiliste lainete tüüp on määratud piesoelektrilise alusmaterjali omadustega ja elektroodi struktuuriga, mis moodustavad akustilise laine saatja ja vastuvõtja (joonis 7.1).
Joonis 7.1. Pieso-kvartsresonaator
Niiskustundliku kihi dielektrilise konstandi massi või elektrijuhtivuse suurenemine niiskuse imendumise tulemusel põhjustab pinna akustiliste lainete (SAW) kiiruse vähenemise. Anduri väljundi muutus võib põhineda laine kiiruse, sageduse või faasi muutusele.
Pinna akustiliste lainetele (SAW) põhinev andur, mis on valmistatud LiNbO3 alusele kantud niiskustundliku polüvinüül-alkoholile põhineva kihiga (PVA), on näidatud joonisel 7.2a.
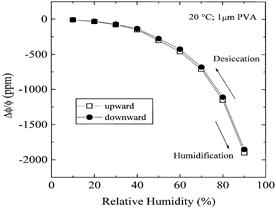
Joonis 7.2 Pinna akustiliste lainetele (SAW) põhinev andur
Imendumis-impedants-niiskusandurid
Väljundsignaali faasi muutus suhtelise niiskuse funktsioonina on kujutatud joonisel 7.3b.
Imendumisimpedantsi niiskusandurite töö põhineb niiskustundliku kihi impedantsile sõltuvalt imendunud niiskusest. Enamus juhtudel seda tüüpi andurite aseskeemi võib kujutada rööbiti ühendatud takisti ja kondensaatori kujul. Selle aseskeemi takistus on määratud järgmiselt:
(7.1)
kus Z on kogutakistus, R ja C on elektroodidevahelise sorbendikihi aktiivtakistus ja mahtuvus, f on toitepinge sagedus.
- Polümeerist niiskustundliku kihiga andurid
Praktiliselt kõigi orgaaniliste polümeermaterjalide füüsikalis-keemilised omadused muutuvad teatud määral niiskuse imendumisel. See võimaldab nende kasutamist niiskusandurites. Tundlikud polümeermaterjalid klassifitseeritakse polüelektrolüütilisteks ja dielektrilisteks. Nende materjalidega toodetud andurid on mahtuvuslikku, takistuslikku ja piesoelektrilist tüüpi.
Dielektrilist tüüpi andurites vee molekulid kinnituvad absorptsiooni ja desorptsiooni protsessis sobivates kohtades polümeervõrku. Polümeeri dielektriline konstant suureneb veemolekulide koguse kasvades. Sellel põhimõttel toodetakse kondensaatori struktuuriga niiskusandureid. Anduri mahtuvus muutub polümeeri dielektrilise konstandi muutuse tulemusel.
Iooniliste monomeeridega polümeerid klassifitseeritakse kui polü-elektrolüütilised. Seda tüüpi materjale iseloomustab iooniline elektrijuhtivus, mis suureneb niiskuse lisandumisel. Sellel põhimõttel toodetakse takistuslikke niiskusandureid.

Joonis 7.3 Polümeerist niiskustundliku kihiga andurid
Polüimiid on sageli kasutatav polümeer suure hulga võimalike materjalide hulgast. Selle põhjuseks on polüimiidi ühilduvus kaasaegsete pooljuhtide tehnoloogia protsessidega.
Teine polümeerist tundlikku kihti kasutav niiskusandurite tootmistehnoloogia põhineb piesoelektrilisele muundurile. Ränisse tekitatakse diafragma, millele kantakse polüimiidi kiht. Diafragma piesotakistid moodustavad Wheatstone silla. Selle anduri töö põhineb polüimiidi paisumise efektile niiskuse suurenemise mõjul. Niiskuse imendumine põhjustab polüimiidi paisumise ja rõhu tekkimise piesotakistile. Piesotakisti takistuse muutus on niiskuse muutuse informeeriv parameeter.
- Kileandurid anodeeritud Al2O3 baasil
Alumiiniumoksiidi kiht saadakse puhtast alumiiniumist anoodi oksüdeerimisel. Andur koosneb alumiinium-alusest, millele on elektrokeemilise oksüdatsiooniga formeeritud Al2O3kiht (joonis 7.4). Õhuke metallist (harilikult kullast) niiskuskindel kiht on teiseks elektroodiks.
Alumiiniumoksiid-andurite tunnusjooned on peamiselt määratud Al2O3 anoodkihtide omadustega, mis omakorda sõltuvad tugevasti elektrolüüdi koostisest ja anodeerimise tingimustest.
Joonis 7.4. Kileanduri tööpõhimõte [60]
Joonis 7.5 kujutab anduri mahtuvuse ja aktiivtakistuse sõltuvust suhtelisest niiskusest.

Joonis 7.5 mahtuvuse ja aktiivtakistuse sõltuvust suhtelisest niiskusest. [60]
- Poorsele ränile põhinevad niiskusandurid
Niiskusandurite tootmiseks saab mõningate täiendavate tootmisprotsessidega kasutada tavalisi integraallülituste tehnoloogiaid. Üks niiskusandurite valmistamise tehnoloogia põhineb poorse räni kasutamisele tundliku kihina. Poorne räni tekitatakse anodeerimisega. Anodeerimist saab teostada vesinikfluoriidhappe (HF) 25% lahuses, mis on segatud etanooliga. Selle protsessi järel räni muutub poorseks.
- Niiskusandurid, mis põhinevad MOS struktuuridele
Nende andurite eeliseks on madal hind tänu nende tootmisele suurtes kogustes tavalise integraallülituste tehnoloogiga ning parameetrite hea korratavus. Tundlike elementidena saab kasutada polümeere. Nende hulgas on polüimiid. See on ühilduv integraallülituste tootmise standardprotsessiga. Tundlik element on paigutatud MOS-transistori paisu piirkonda.
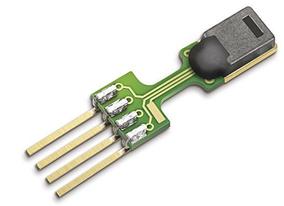
Joonis 7.6 Niiskusandurid, mis põhineb MOS struktuuridel
- Keraamilistele materjalidele põhinevad niiskusandurid
Sellesse gruppi kuuluvad andurid, milles tundlik element on valmistatud poorsest pooljuhist või dielektrilisest keraamikast, mis sisaldab ühte oksiidi või erinevate oksiidide segu. Keraamilisi niiskusandureid klassifitseeritakse vastavalt nende tööpõhimõttele ioonilisteks, pooljuhtivateks ja tahkele elektrolüüdile põhinevateks.
Enim kasutatakse ioonilisi andureid. Nende tunnusjoon on määratud takistuse ja niiskuse sõltuvusega. Sõltuvalt nende tootmisprotsessist jaotatakse seda tüüpi andurid pakett-, paksukile ja õhekile anduriteks. Pakettandureid toodetakse standardse keraamika tehnoloogiaga või selle modifikatsioonidega. Paksukile andureid valmistatakse spetsiaalse pasta kandmisega keraamilisele alusele, mis on tavaliselt valmistatud Al2O3-st. Õhekile andureid toodetakse lahustuva geeli (sol-gel) tehnoloogia põhjal. Pärast nõutavaid ettevalmistusi sünteesitakse formeeritud element kõrgel temperatuuril.
Ioonilist tüüpi andurites tundliku elementi kogutakistus väheneb suhtelise õhuniiskuse suurenedes, mis on määratud pinna füüsikalise adsorbtsiooniga ja vee molekulide kondenseerumisega mikrokapillaarides. Pooljuhtandurite juhtivuse algoritm sõltub võrdeliselt veeauru logaritmist. Sellisel juhtumil keraamilise pinnaga keemilise imendumise protsessiga seotud veemolekulid töötavad doonorite tsentritena, andes elektrone keraamikasse. Keraamiliste andurite peamised eelised on mehaaniline tugevus, keemiline takistus, temperatuuri- ja füüsikaline takistus, võime talitleda kõrgetel temperatuuridel.
Teistel füüsikalistel nähtustel põhinevad niiskusandurid
Sellesse gruppi kuuluvad niiskusandurid, mille talitlus põhineb senivaadeldutest erinevatele põhimõtetele. Esmalt on nendeks optilised niiskusandurid. Nendes muutuvad niiskustundliku kihi optilised omadused.
Teised niiskusandurite tüübid on toodetud optiliste kiudude baasil. Niiskustundliku kihiga kaetud kiu optilised omadused muutuvad. Seda tüüpi andureid toodetakse õhekile polümeeriga kaetud U-kujulise kvartskiu baasil.
Lisaks optilistele on veel mikrolaine, fotoakustilised ja magnetelastsed niiskusandurid. Mikrolainestruktuuriga andurid talitlevad mõne GHz sagedusel ja kasutavad tundliku kihina paksukile tehnoloogiaga valmistatud polüimiidkihti. Nad on välja töötatud töökeskkonna juhtimiseks raadiosageduslikes süsteemides.
2.9. OBJEKTI REGISTREERIVAD ANDURID
Kontaktandurid objekti registreerimiseks
Objekt registreerimise kontaktanduritena võib kasutada mehaanilisi lüliteid. Nad tekitavad sees/väljas-tüüpi signaale objektiga mehaanilise kontakti tulemusel. Kui objektilt rõhk eemaldada, siis lüliti tagastub algolekusse.
On olemas kahte tüüpi lüliteid: normaalselt avatud (NO) ja normaalselt suletud (NC). NO lülititel on avatud kontaktid ning kui neile rakendada mehaaniline jõud, siis nad sulguvad ja ühendavad elektriahela; NC lülititel on suletud kontaktid, mis avanevad mehaanilise jõu rakendamisel, ja katkestavad elektriahela.
Lüliteid saab kasutada mööduvate objektide kindlakstegemiseks. Seda saab teostada, kasutadesrullikut (joonis 8.1а) või kangi (joonis 8.1.b).
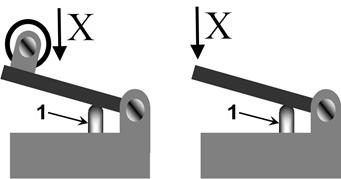
Joonis 8.1 Kontaktandurid
Kontaktandureid kasutatakse laialdaselt peamiselt nende odavuse tõttu ja kuna neid ei mõjuta objekti kuju, värvus ega materjal.
Lähedusmuundurid
Nendel muunduritel puudub kontakt liikuva objektiga. Nende väljundsignaal on funktsioon muunduri ja objekti vahelisest suhtelisest asendist. Sõltuvalt füüsikalisest tööpõhimõttest nad on:
- induktiivmuundurid;
- pöörisvoolumuundurid;
- mahtuvusmuundurid;
- ultrahelimuundurid jne.
Nende muundurite eeliseks on nende suur töökindlus, kuna objekti ja muunduri vahel pole mehaanilist kontakti, hõõrdumist, kulumist, müra ega takistuse muutumist.
Puuduseks on mittelineaarne muundusfunktsioon. Väljundsignaal sõltub tavaliselt mitte ainult objekti kaugusest, vaid ka selle kujust ja materjalist.
Need mõõtemuundurid võivad töötada nii analoog- kui digitaalrežiimis. Analoogrežimis on väljundsignaaliks pidev funktsioon anduri ja objekti vahelisest kaugusest. Digitaalrežiimis on kaks diskreetset taset – madal ja kõrge. Kõrge väljundtase vastab objekti olemasolule teatud kaugusel muundurist. Madal tase vastab objekti puudumisele või see on muundurist kaugel. Lähedusmuundurid talitlevad digitaalrežiimis.
Magnetilise takistuse muutmisega induktiivmuundur
Seda muundurit võib ette kujutada kui trafot, mille primaarmähis on ergutusmähiseks ja sekundaarmähis on muunduri mõõtemähiseks. Sellise trafo magnetahel sisaldab liikuvat objekti, mis peab olema ferromagnetiline või ferromagnetilise kattega.
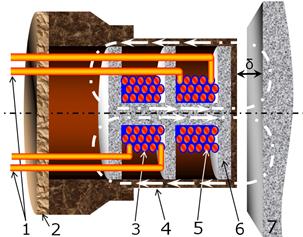
1 – ühendusjuhtmed mõlemale mähisele; 2– kaas; 3 – ergutus- mähis; 4 – mittemagnetiline kest; 5 – mõõte-mähis; 6 – karkass; 7 – ferromagnetiline objekt
Joonis 8.2 Magnetilise takistuse muutmisega induktiivmuundur [63]
Vahemaa d bjekti ja anduri vahel määrab magnetilise takistuse ja järelikult – magnetvoo läbi sekundaarmähise ning pinge selle klemmidel. See pinge sõltub mittelineaarselt >d -st,
(8.1)
kus E on algpinge, kui ![]() ; koefitsient a sõltub objekti magnetilisest läbitavusest, kujust ja mõõtmetest.
; koefitsient a sõltub objekti magnetilisest läbitavusest, kujust ja mõõtmetest.
Mida lähemal on objekt muundurile, seda kõrgem on mõõtemähise pinge.
Pöörisvooluandurid
Pöörisvooluandurite tööpõhimõte põhineb pooli aktiivtakistuse ja induktiivsuse muutusele voolujuhtiva objekti lähenemisel.
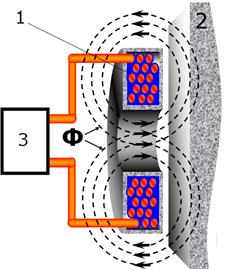
1 – mähis; 2 – juhtivast materjalist objekt; 3 – kõrgsagedusgeneraator
Joonis 8.2 Pöörisvooluandur [63]
Pooli läbiv vahelduvvool tekitab objektiga lõikuva magnetvälja, mis tekitab selles pöörisvoolud. Need tekitavad magnetvälja, mis on vastupidine tema tekkepõhjusele, s. t. mähise magnetväli väheneb. Mähise elektrilised omadused muutuvad: aktiivtakistus suureneb kadude suurenemise tõttu juhtivas keskkonnas ja mähise induktiivsus väheneb.
Mahtuvuslikud lähedusmuundurid
Mahtuvuslikud andurid kasutavad läheneva objekti võimet muuta anduri poolt mõõdetavat mahtuvust.
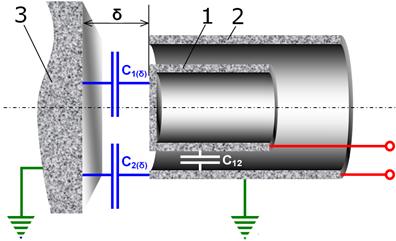
1 – silindriline osa;
2 – koaksiaalne toru ümbris;
3 – objekt
Joonis 8.3 Mahtuvuslikud lähedusmuundur
Elektriline aseskeem on kujutatud joonisel 8.4.
(8.2)
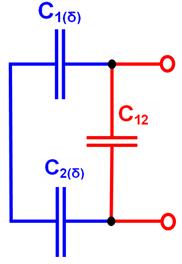
Joonis 8.4 Mahtuvuslikud lähedusmuunduri tööpõhimõte [60]
Punkt 2 ja objekt 3 on harilikult maandatud. Seega
(8.3)
s.t. ekvivalentne mahtuvus sõltub anduri ja objekti vahekaugusest.
Muundur on tavaliselt ühendatud vahelduvvoolusillaga.
Ultraheli-lähedusmuundurid
Seda tüüpi andurites kasutatakse ultraheli saatjat ja vastuvõtjat (joonis 8.5). Väljastatud ultraheli peegeldub objektilt ja tagastub vastuvõtjale.
>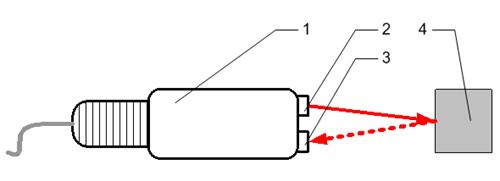
1- anduri kere, 2 – ultraheli saatja, 3 – ultraheli vastuvõtja, 4 – objekt
Joonis 8.5 Ultraheli-lähedusmuundur [60]
Ultraheliga objektide registreerimist ei mõjuta objekti optilised näitajad. Erinevalt induktiiv- ja pöörisvooluanduritest ultrahelil ole piiranguid registreeritava objekti materjalile.
Optilised andurid objekti registreerimiseks
Optoelektroonilised muundurid koosnevad elementide paarist: valgusallikast ja vastuvõtjast, mis reageerib temale langevale valgustugevusele. Enamus paljudest vaatlusmeetoditest põhineb valgusallika füüsikalisel paigutusel vastuvõtja suhtes.
Enamus optoelektroonilisi andureid kasutab valgusallikana valgusdioode (LED). LED on elektriliselt dioodisarnane pooljuhtkristall, mis erineb selle poolest, et ta kiirgab pärivoolu korral väikesel määral valgust. Rakendustes, kus vaadeldav värvus on kontrastne, võib olla oluline LED värvi valik.
Optoelektrooniline vastuvõtja kasutab tavaliselt ühte kolmest valgustundlikust elektroonilisest elemendist: fototakisti, fotodiood või fototransistor.
Valgusdioodid, välja arvatud infrapuna LEDid, väljastavad vähem valgust kui fluorestsents- või hõõgniidiga valgusallikad. Tavaliselt nad väljastavad vähem valgust kui ümbritsev valgustase. Andurite valgusvoo moduleerimine võimaldab nõutavat tundlikkust, mis on vajalik nõrga valguse töökindlaks tuvastamiseks.
Valgusdioode võib sisse ja välja lülitada (moduleerida) suure kiirusega, tavaliselt mitme kHz sagedusega (joonis 8.6). Modulatsioon võimaldab fototransistor-vastuvõtja võimendi häälestada modulatsioonisagedusele võimendama ainult selle sagedusega pulseerivaid valgussignaale.
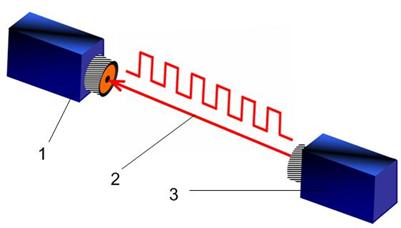
1 – vastuvõtja;2- moduleeritud signaal; 3 – muundur
Joonis 8.6 Optiline andur objekti registreerimiseks
Vastuvõtja ignoreerib ümbritsevat valgust ja vastab ainult oma moduleeritud valgusallikale. Seetõttu moduleeritud vastuvõtjat võib võimendada väga kõrge tasemeni. Sellest hoolimata võivad väga eredad valgusallikad takistada anduri normaalset tööd.
Infrapuna LEDe kasutatakse optilistes andurites kõige laialdasemalt, kuid kui tuleb määrata värvust, kasutatakse nähtavas spektrialas töötavaid valgusdioode.
Eristatakse optiliste anduritega objektide registreerimise kolme põhitehnikat: difusioon-, barjäär- ja reflektortehnikat
- difusiooni meetod
Seda meetodit kasutavates andurites objekt registreeritakse anduri eest möödumisel ja peegeldab valgusallika valgust tagasi vastuvõtjasse. Sel juhul on objekti värvusel tugev mõju. Mida heledam on objekti värvus, seda kaugemalt võib seda registreerida. Valgusallikas ja vastuvõtja on harilikult, kuid mitte alati paigutatud samasse ümbrisesse.
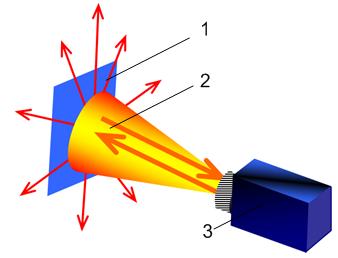
1- objekt; 2- valguskiir; 3 – andur
Joonis 8.7 Optiline anduri difusiooni meetod [63]
Difusioonimeetodil valgusallika valgus langeb objektile teatud nurga all. Sel hetkel valgus hajub objekti pinnalt erinevatesse suundadesse. Vastuvõtja võib olla eri nurga all ja sellesse jõuab nõrk hajunud valgus. Sellest vaatepunktist difusioonimeetod on suhteliselt ebaefektiivne objektide registreerimiseks. Veelgi enam, difusioonimeetodil on ülimalt tähtis, millisel määral registreeritava objekti pind peegeldab valgust. Heledaid valgeid pindu registreeritakse palju kaugema vahemaa tagant kui matte musti pindu. Suuremõõteline objekt, mis hõlmab kogu anduri voo, tagastab vastuvõtjale enam energiat kui väike objekt, mis hõlmab voogu ainult osaliselt. Enamus difusioonanduritel on läätsed väljastatava valguskiire suunamiseks, aga ka suurema hulga peegeldunud valguse fokuseerimiseks. Difusioonandurite läätsed võimaldavad pikemat registreerimisvahemaad ja suurendavad oluliselt koostenurka läikivate ja siledate objektide määramise rakendustes.
- registreerimise barjäärimeetod
Barjäärimeetodi korral (joonis 8.8) vastuvõtja ja allikas on paigutatud eri ümbristesse. Nad on paigaldatud üksteise vastu ja nende vahel on valgusvoog. Objekt tehakse kindlaks, kui ta läheb läbi vastuvõtja ja allika vahelt, katkestades vastuvõtjasse saadetava valgusallika valguse. Objekti registreerimisel optiliste anduritega on tõhusaim barjäärimeetod.
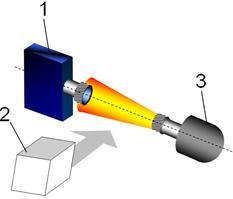
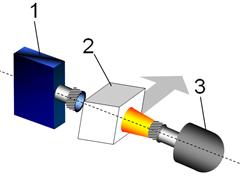
1- vastuvõtja; 2- objekt; 3- valgusallikas [63]
Joonis 8.8 Optiline anduri parjäär meetod
- registreerimise reflektormeetod
Reflektormeetodi korral (joonis 8.9) kasutatakse reflektorit, mis peegeldab tagasi temale langenud valguse. Valgusvoog tekib valgusallika, reflektori ja vastuvõtja vahel. See võib olla infrapuna või nähtav valgus. Kui objekt ristub valguskiirega, siis andurisse tagastuva peegeldunud valgusvoo tugevus väheneb ja objekt tehakse kindlaks.
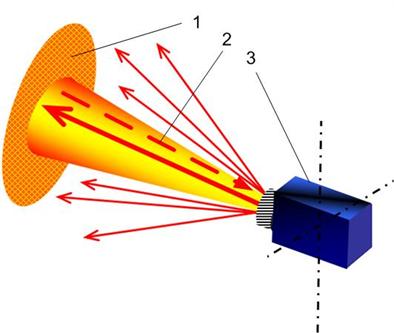
1- reflektor; 2- valguskiir; 3 – andur
Joonis 8.9 Optiline anduri reflektormeetod [63]
Läikivate objektide kindlakstegemiseks tuleb andur paigaldada sedasi, et valgusvoo langemisnurk oleks erinev 90°-st. Sellisel viisil peegeldunud valguse tugevus väheneb.
Teine tehnika läikivate objektide kindlakstegemiseks on polariseerivate filtrite kasutamine. Filtrid paigutatakse valgusallika ja vastuvõtja ette, kusjuures filtrite polarisatsioonitasandid on pööratud 90 °. Väljastatud polariseeritud valgus peegeldub reflektorilt, mis muudab ka selle polarisatsioonitasandit, nii et see saab läbida vastuvõtja polarisatsioonifiltrit. Kui väljastatud valgus peegeldub objektilt, siis selle polarisatsioonitasand ei muutu ja vastuvõtja polarisatsioonifilter ei edasta seda valgust ja see võimaldab objekti olemasolu tuvastada.
2.10. GAASIANDURID
Gaasiandurite tootmiseks kasutatakse arvukalt füüsikalisi põhimõtteid. Nende üldiseks omaduseks on, et tundlik element taastub pärast seda, kui gaasi enam ei esine. Gaasiandurite tundlikud elemendid põhinevad suurele hulgale materjalidele ja tehnoloogiatele. Praktikas kasutatavate gaasiandurite põhimõttelised tüübid on esitatud joonisel 9.1.
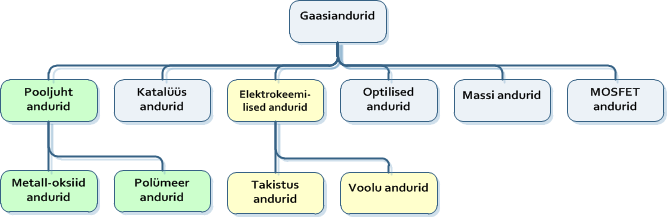
Joonis 9.1 Gaasiandurite põhimõttelised tüübid [60]
Pooljuht-gaasiandurid
Metall-oksiid pooljuhtgaasiandurid
Metall-oksiid gaasiandurite tundlike materjalidena kasutatakse erinevaid metallioksiide, nagu SnO2, ZnO, Fe2O3, WO3, Co3O4 jne. Nende tööpõhimõte põhineb tundliku elemendi pinnapiirkonna elektrijuhtivuse suurenemisele imendunud gaasi tulemusena. Sõltuvalt tundliku kihi koostisest andur reageerib erinevatele gaasidele, nagu C2H5OH, CO, CH4, H2, O2 jne. Töötemperatuur on vahemikus 200оС kuni 500оС.
Metall-oksiid pooljuhtgaasiandureid toodetakse tööstuslikult >tina dioksiidialusel erinevate lisanditega. Nende tööpõhimõte on takistuse muutus gaasi esinemisel. Kui SnO metall-oksiidkihti kuumutada teatud temperatuuril õhus, siis hapnik adsorbeerub kristalli pinnale negatiivse laenguga. Tekkinud pinnapotentsiaal toimib elektronide läbimisel potentsiaalibarjäärina (joonis 9.2а).
Joonis 9.2 Metall-oksiid pooljuhtgaasianduri tööpõhimõte [60]
Elektrivool kulgeb anduris läbi SnO2 mikrokristallide ühendusosade (terade piiri). Adsorbeerunud hapnik moodustab potentsiaalibarjääri piki terade piiri, mis väldib elektronide vaba liikumist. Anduri elektriline takistus sõltub sellest potentsiaalibarjäärist. Redutseeriva gaasi olemasolul negatiivselt laetud hapniku pinnatihedus väheneb ja seega barjääri kõrgus terapiiril väheneb (joonis 9.2b). Vähenenud kõrgus vähendab ka anduri takistust. Nende protsesside kiirus ja pööratavus sõltuvad temperatuurist, mille juures tundlik element töötab. Metalloksiidanduritel on suur tundlikkus gaaside suhtes isegi madalatel kontsentratsioonidel, kuna anduri takistuse ja gaasi kontsentratsiooni vaheline sõltuvus on logaritmiline.
Kaasaegsed seda tüüpi andurid on toodetud:
- paksukihi tehnoloogiaga;
- õhekile tehnoloogiaga;
Alumiiniumoksiidist alusele kantakse plaatinakontaktid ja need kaetakse tundliku materjali kihiga. Aluse vastasküljele tekitatakse õhekile plaatina takistuskütteelement. Andur võib talitleda erinevatel viisidel, kuid levinuim on takistuse mõõtmine konstantsel temperatuuril. Teine viis on temperatuurimodulatsioon ja takistuse mõõtmine eri temperatuuridel. Seda tüüpi anduri tundlikkust saab parandada filtrite kasutamisega ja tundlikku elementi erinevate materjalide lisamisega.
Polümeer-pooljuht gaasiandurid
Tundlike elementidena kasutatakse ftalotsüaniinidele põhinevaid kihte. Neil on kõrge soojuslik ja keemiline takistus. Need kihid on p-tüüpi pooljuhid ja hapnikul on tugev mõju nende elektrijuhtivusele. Gaasi olemasolul pinnakihi laeng muutub. Anduri tundlikkus suureneb, kui kihtidesse lisatakse raskemetalle.
Katalüütilised gaasiandurid
Katalüütiliste gaasiandurite pinnal vabaneb soojust katalüütiliste reaktsioonide tulemusena. See soojus põhjustab gaasianduri temperatuurimuutuse, mida mõõdetakse temperatuurianduriga. Neid nimetatakse ka pelistorideks. Oksiidmaterjalist plaati on manustatud plaatinamähis. Tundlik oksiidmaterjal on kaetud poorse plaatina või pallaadiumkatalüsaatoriga. Mähis talitleb takistusliku temperatuurianduri kütteseadmena. Kui uuritav gaas reageeri, siis vabaneb soojus anduri katalüütilisel pinnal. See tõstab plaadi ja sellesse manustatud mähise temperatuuri. Selle tulemusena mähise takistus suureneb, mida registreeritakse elektroonikaskeemiga.
Elektrokeemilised gaasianduri
Need andurid kuuluvad mitmeotstarbeliste gaasiandurite hulka. Sõltuvalt tööpõhimõttest elektrokeemilised gaasiandurid jaotatakse potentsiomeetrilisteks ja аmpermeetrilisteks Igal elektrokeemilisel gaasianduril on vähemalt kaks elektroodi (anood ja katood), mille vahel tekib keemiline reaktsioon. Elektroodid on valmistatud katalüütilisest metallist nagu plaatina ja pallaadium.
Potentsiomeetrilised andurid
Need põhinevad reagendi kontsentratsiooni efektile, mis mõjub oksüdatsiooni-reduktsiooni reaktsioonide vahelisele tasakaalule elektrokeemilise elemendi elektroodi ja elektrolüüdi vahel. Elemendi potentsiaali mõõtmine tehakse praktiliselt nullise vooluga. Selleks mõõtmiseks on vaja väga suure sisendtakistusega mõõteriista.
Ampermeetrilised andurid
Ampermeetrilist andurit läbiva voolu amplituud sõltub membraani läbiva gaasi kontsentratsioonist uuritavas keskkonnas. Ampermeetriline meetod on aluseks tahkele elektrolüüdile põhinevatele gaasianduritele, mida kasutatakse hapniku ja vääveldioksiidide sisalduse määramiseks. Elektrolüüdina kasutatakse tsirkooniumdioksiidi erinevate doonorlisanditega. Tundlik element (tahke elektrolüüt) talitleb temperatuuril üle 300 оС.
Optilised gaasiandurid
Nad põhinevad elektromagnetiliste lainete ja uuritava gaasi vastasmõjul. Selle tulemusena muutuvad mõned kiirguskarakteristikud: tugevus, polarisatsioon jne. Optilised gaasiandurid võib jagada mitmesse põhigruppi:
Optoelektroonilised andurid on valgusallika (valgusdioodi või pooljuhtlaseri) ja fotovastuvõtja (fotodiood, fototransistor) kombinatsioon. Nende vahel paikneb läbipaistev keskkond. Gaasi kontsentratsiooni mõõtmiseks kasutatava anduri väljundsignaali mõjutab keskkonna optiliste omaduste muutus uuritava gaasi mõjul;
Optilistele kiududele põhinevad andurid
Nendes andurites valgusallika ja vastuvõtja vaheline valgus kantakse edasi optilise kiuga, mille parameetrid sõltuvad uuritava gaasi kontsentratsioonist;
- Ultraviolett- ja luminestsents-spektroskoopiale põhinevad andurid;
- Infrapuna- ja Ramani spektroskoopiale põhinevad andurid;
- Pinna plasmaresonantsile põhinevad andurid.
Gravimeetrilised andurid
Need on andurid, milles süsteemi mehaanilised omadused muutuvad gaasi molekuli adsobtsiooni ja väga väikese massi muutuse tulemusena.. Neis ei teki keemilisi protsesse ja nende tööpõhimõte on puhtalt füüsikaline. Piesokristallidele põhinevad generaatorid on eriti tundlikud nende elektroodide massi muutustele. Sellel põhimõttel gaasiandurite valmistamiseks tuleb tagada uuritava gaasi molekulide adsorbtsioon elektroodipindadel, millele on kantud õhuke kiht adsorbeerivat materjali. Seega, kui uuritava gaasi kontsentratsioon keskkonnas tõuseb, siis suureneb piesokristalli pinda adsorbeerunud mass. Generaatori väljundsagedus väheneb sellega võrdeliselt.
MOS-struktuurilepõhinevad gaasiandurid
MOS-struktuuri, mille metallelektroodid on valmistatud siirdemetallidest (pallaadium, plaatina, nikkel), omadused muutuvad gaaside mõjul. MOS-transistori lävipinge muutub ning pinge-voolu tunnusjoon nihkub. MOS-kondensaatorites nihkub pinge-mahtuvuse tunnusjoon kuju muutmata piki pingetelge. Neid efekte kasutatakse eri ehitusega gaasiandurite tootmiseks (perforeeritud pais, jaotatud pais jne).
Vaadeldud anduritel on oma eelised ja puudused, mis suures osas määravad nende rakendusvaldkonnad. Optilised gaasiandurid on kõrge selektiivsusega ja tundlikkusega, kuid nad on kalleimad. Seetõttu neid rakendatakse portatiivsetes gaasianalüsaatorites. Metall-oksiid gaasianduritel on kõrge tundlikkus, madal hind, kiire reaktsioon, kuid neil on suhteliselt madal selektiivsus ning nende tööd mõjutavad keskkonna niiskus ja temperatuur. Neid kasutatakse gaasilekke kontrollsüsteemides, õhukvaliteedi seireks suletud ruumides ‘elektroonilise nina süsteemide arendamiseks ja tootmiseks jne.
Elektrokeemiliste pooljuhtanduritega mõõdetakse hapnikusisaldust automootorites, kus tuleb reguleerida vingugaasi, süsivesinike ja lämmastikoksiidide emissiooni. Neid kasutatakse ka katlaseadmetes põlemise juhtimiseks, metallurgias termotöötluse gaasi koostise juhtimiseks jne.
Katalüütilisi gaasiandureid kasutatakse tööstuses peamiselt plahvatusohtlike gaaside kindlakstegemiseks.
Gaasiandurite tootjad
Peamised metalloksiid-gaasiandurite tootjad on järgmised firmad: FIGARO Engineering Inc. (Jaapan), SYNKERA Technologies Inc. (USA), e2v Technologies (Suurbritannia), Sencera (Taiwan), Henan Hanwei Electronics (Hiina), Microsens (Šveits) jne. Mõningad metalloksiid-andureid keskkonna reguleerimiseks pakkuvad firmad on toodud tabelis 9.1. [60]
Tabel 9.1
| Tootja | Anduri tüüp | Mõõdetav gaas | Gaasi sisaldus, ppm | Energiatarve, mW |
| FIGARO | TGS2442 | CO | 50-1000 | 14 |
| TGS2444 | NH3 (ammoniaak) | 10-100 | 56 | |
| TGS825 | H2S (vesiniksulfiid) | 5-100 | 660 | |
| TGS 2611 | Metaan | 500-10 000 | 280 | |
| TGS 4161 | CO2 | 400-9 000 | 300 | |
| SYNKERA | 705 | NH3 (ammoniaak) | 25-10 000 | 975 |
| 706 | NOx | 0,5-10 | 500 | |
| 707 | VOCd | kuni 100 | 400 | |
| 714 | H2S (vesiniksulfiid) | 1-100 | 900 | |
| 711 | Metaan, propaan | 90-10 000 | 900 | |
| e2v tehnoloogiad | MiCS-2710 | NO2 | 0,05-5 | 50 |
| MiCS-5135 | VOCd | 10-1 000 | 120 | |
| MiCS-5525 | CO | 1-1 000 | 88 | |
| MiCS-5914 | NH3 (ammoniaak) | 0,1-10 | 88 | |
| Sencera | HS134 | CO | kuni 100 | 800 |
| HS811 | CO2 | 350-10 000 | 1 200 | |
| HS131 | Metaan, propaan | 1 000-5 000 | 800 |



 >
>

 >
>
2.11. Andurite liidesed
Sõltuvalt väljundsignaali tüübist eristatakse analoog-, sagedus- ja digitaalväljundiga andureid. Sõltuvalt signaali edastamise keskkonna tüübist jaotatakse andurite liidesed kahte rühma: juhtmega ja juhtmeta.
Analoog-pingeväljundiga andurid
Seda tüüpi andurite väljundsignaaliks on pinge, mis muutub koos anduri sisendsignaaliga. Pingeväljundiga andurite puudus: signaali ei saa edastada pikkade vahemaade taha juhtmete pingelangude tõttu ning samuti tekkivate mürahäiringute mõju liitub signaaliga ja suurendab seda. Müra võib pärineda lähedalasuvatest mootoritest, kontaktoritest ja igat tüüpi elektromehaanilistest seadmestikust. See mõjutab negatiivselt mõõtetäpsust ja sageli on vajalik mõõtemomendil müra eemaldada või vähendada, kasutades sobivaid analoog- või digitaalfiltreid.
Vooluväljundiga andurid
Vooluväljundiga (joonis 10.1) anduri liides tekitab väljundis voolu, mis muutub vastavalt mõõdetavale suurusele. Erinevalt pingeväljundiga anduritest võib vooluväljundiga anduri signaali edastada pikemate vahemaade taha ja häiringud mõjutavad seda vähem. Vooluväljundile on välja arendatud erinevaid standardeid, kuid enim rakendatav on 4-20 mA standard. Vähim väärtus anduri mõõtealas vastab 4 mA ja suurim – 20 mA väljundvoolule. Anduri näidud jäävad vahemikku 4 kuni 20 mA. Vooluväljund tagab alati nõutud voolu väljundahelas. Sedasi saab anduriga ühendatud seade voolu katkemisel kergesti tuvastada anduri probleemi (näiteks katkenud juhe). Signaali saab kergesti muuta pingeks 250 Ω takistiga, mille pingelang muutub vahemikus kuni 5 V ja seda saab kergesti mõõta programmeeritava kontrolleriga (PLC-ga) või digitaal-analoog-muunduriga.
Joonis 10.1. Vooluväljundiga andur [63]
Andurite andmevahetuseks 4-20 mA liidese baasil on välja töötatud HART protokoll. Infovahetuse digitaalinfo liidetakse analoogsignaalile.
Sagedussignaali ja pulsilaiusmodulatsiooniga (PWM) andurid
Sagedusväljundiga andureid võib lugeda pooldigitaalseteks ning nende väljundiks on sagedus, periood, lülituskestus, ajavahemik või faasinihe. Sagedusväljundiga andureid iseloomustavad järgmised eelised:
- suur häiringukindlus. Sagedussignaale saab, analoogsignaalidega võrreldes, edastada suuremate vahemaade taha ja nad säilitavad hea mürakindluse. Nad sobivad eriti hästi suurte häiringutega tööstuskeskkonna rakendustesse;
- signaaliedastus on energiasäästlik. Erinevalt analoogväljundiga anduritest, sagedusväljund säästab signaali energiat edastamisel suurte vahemaade taha, kuna pole tarvis eelvõimendust;
- sagedussignaalide mõõtmise kõrge täpsus. See saavutatakse laialt levinud kristallresonaatorite baasil, mis praktikas on stabiilsemad kui analoogpinge mõõtmisel kasutatavad tugipingeallikad.
Võrreldes pingeväljundiga anduritega, sagedusväljundiga andurid ei vaja signaali mõõtmiseks täiendavaid osi, nagu analoog-digitaal-muundureid. Nende viga sagedussignaali muundamisel digitaalkoodiks on tühiselt väike (0,001% suurusjärgus). Sedasama mõõdetud suuruse muundamist sagedussignaaliks võib vaadelda kui ajalise integreerimise protsessi, mille jooksul võimalikud mürad filtreeritakse välja. [60]
Sagedusväljundiga andurid
Sagedussignaal on signaali korduv jada etteantud aja jooksul. Signaali tsüklit nimetatakse perioodiks. Sageduse ja perioodi suhe on järgmine:

(10.1)
kus f on sagedus ja T on periood.
Sagedusväljundiga andurite väljund on sageli nelinurksignaal (joonis 10.2) ja selle sagedus muutub koos anduri sisendiga. Tekitatud sagedus näitab mõõdetava parameetri olekut.
Joonis 10.2 Sagedusväljundiga anduri nelinurksignaal
Pulsilausmodulatsioonväljundiga (PWM) andurid
Seda tüüpi andurite väljundsignaal on nelinurksignaal (joonis 10.3), mille lülitatud oleku kestus väärtus muutub. Lülituskestuse muutused annavad teavet anduriga mõõdetavast väärtusest.
 >
>
Joonis 10.3. Pulsilausmodulatsioonväljundiga (PWM) anduri väljundsignaal
Digitaalsed liidesed
Liidesed RS-485 baasil
RS485 standard on laialt levinud andmete kogumiseks ja juhtimiseks, võimaldades ühisesse võrku ühendada arvukalt seadmeid. Andmete edastamiseks kasutatakse kahejuhtmelist diferentsiaalsignaali (A ja B). Mürakindluse suurendamiseks kasutatakse keerupaarikaablit. (Joonis 10.4).
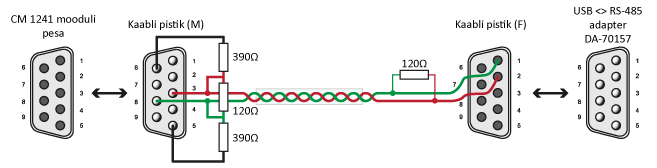
Joonis 10.4 Liides RS-485 baasil [60]
RS485 on eelistatud liides tööstussüsteemide kommunikatsiooniks ja eriti andurite ühendamiseks, kuna ühisesse võrku saab ühendada arvukalt ülem- ja alluvseadmeid.
Standardina saab ühisesse võrku ühendada kuni 32 seadet, kuid teatud momendil ainult üks seade on ülemseade ja ülejäänud on alluvseadmed. Seadmed ühendatakse ühtsesse võrku ja siini mõlemasse otsa ühendatakse takistid.
RS485 standardile põhineb arvukalt kõrgema taseme andmevahetusprotokolle, nagu Modbus, mis on automaatikas laialt levinud.
CAN liides
CAN protokoll töötati algselt välja autotööstusele, kuid hiljem rakendati seda laialdaselt tööstusautomaatikas. See on töökindel andmevahetusprotokoll, milles sõnumeid edastavad võrgu üksikud seadmed. Nende eelistus määratakse erilise sõnumitunnusega. Seadmed on ühendatud ühisesse võrku. Nn kokkupõrgete vältimiseks (see on juhtum, mil kaks seadet hakkavad edastama samaaegselt), rakendatakse CSMA/CD (Carrier Sense Multiple Access with Collision Detection) toimemehhanismi. Seadmed jälgivad, kas võrk on vaba, ja alustavad saatmist, kui teist sõnumit ei edastata. Kui samal momendil teine seade alustab edastamist, siis toimub võrgus bitikaupa arbitreerimine. Arbitreerimise võidab seade, mis edastab loogilise nulli, kusjuures seade, mis proovis edastada loogilist ühte, peatab edastamise ja ootab siini uut vabanemist. CAN protokolli baasil on välja arendatud kõrgema taseme CANopen protokoll, mis võimaldab ühendada erinevate tootjate andureid jm seadmeid.
Integreeritud andurite SPI ja I2C liidesed
Seda tüüpi liidest kasutatakse integreeritult toodetud andurites (kasutatakse integraalskeemidena) või trükkplaadile paigaldamiseks ettenähtud andurites. Mõlemal liidesel on ülemseade ning üks või enam sellega ühendatud alluvseadet. Ülemseade alustab kommunikatsiooni, valib seadme, millega andmevahetus toimub, ning juhib taktsignaali.
SPI liidese kommunikatsioon teostatakse neljal viisil: MISO – ülemseadme sisend – alluvseadme väljund (master input – slave output); MOSI – ülemseadme väljund – alluvseadme sisend (master output-slave input); SCLK – jadasignaali takt (serial clock); SS – alluvseadme valik (slave select) (aktiivse nulltasemega). Joonis 10.5 kujutab ülem- ja alluvseadme ühendusviisi.
Joonis 10.5 Ülem- ja alluvseadme ühendusviis [60]
I2C liides kasutab jada-andmevahetuseks kahte juhet: SDA – jada-andmed (serial data) ja SCL – jada-kell (serial clock) (joonis 10.6). Mõlemas juhtmes tuleb ühendada toitepingega nn pingetõstetakistid.
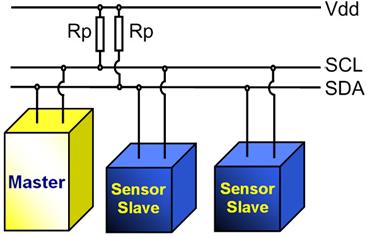
Joonis 10.6 SDA – jada-andmed (serial data) ja SCL – jada-kell (serial clock) [60]
IEEE 1451.4
IEEE 1451.4 on üks standarditest, mis kirjeldavad nutiandurite ühendamisviise. IEEE 1451.4 määratleb mitmed nutiandurite tähtsad elemendid, tuginedes nende tööpõhimõttele ja liidesele.
Standardi põhiidee on anduri võime säilitada teavet iseenda kohta, mis muudab tema kasutamise lihtsaks. Anduris säilitatav info puudutab seadme tüüpi, seerianumbrit, mõõtevahemikku, viimase kalibreerimise kuupäeva jne. Need andmed leiduvad anduri EEPROM mälus ja on korraldatud nn mõõtemuunduri elektrooniliste andmelehtedena (TEDS – Transducer Electronic Data Sheets).
Standardi IEEE 1451.4 (joonis 10.7) põhjal salvestatakse anduri analoogsignaal ja samal ajal lisatakse jadakommunikatsiooni võimalus TEDS-ist säilitatavate andmete lugemiseks.
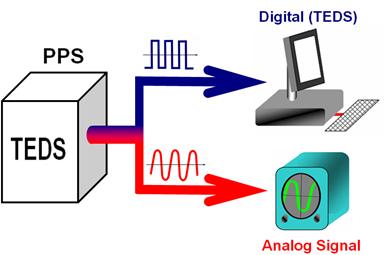
Joonis 10.7. TEDS süsteem [63]
Digitaalsed juhtmevabad liidesed
ZigBee
ZigBee standard on loodud juhtmevaba andmevahetusega jälgimis- ja juhtimissüsteemide töökindluse suurendamiseks. See on uus standard, mis põhineb standardil IEEE 802.15.4 ja see määratleb võrgukihi, turvakihi ja kasutuskihi. Sellega lihtsustub juhtmevabade seadmete välmimine ja võimaldatakse andmesidet erinevate tootjate toodete vahel.
IEEE 802.15.4 standard määratleb mitmete raadiosagedusribade füüsikalised ja kanalikihid, kaasa arvatud 868 MHz, 915 MHz ja 2,4 GHz. Standard on välja töötatud madala energiakuluga töökindla kommunikatsiooni tagamiseks. IEEE 802.15.4 on paketipõhine protokoll. ZigBee laiendab selle uue raadistandardi mahtusid, määratledes paindliku ja töökindla võrgukihi, mis toetab erinevaid arhitektuure töökindla juhtmevaba kommunikatsiooni tagamiseks.
Standardis on määratletud kolme tüüpi ZigBee võrku ühendatavad seadmed: ZigBee koordinaator – ZC; ZigBee ruuter – ZR ja ZigBee lõppseade (end device) – ZED. Igas ZigBee võrgus on üks koordinaator, mis praktiliselt tekitab võrgu ning ühendab või eemaldab seadmeid. ZigBee ruuter võib suunata sõnumeid võrgu naaberseadmetelt teistele seadmetele. ZigBee lõppseadmed ei saa suunata sõnumeid, kuid need võivad olla patareitoitega seadmed, mis lülituvad võrku lühikeseks ajaks, vahetavad infot teiste võrgus olevate seadmetega ning lülituvad vähese energiatarbega režiimi. ZigBee liidesega andurid talitlevad peamiselt lõppseadmetena ja nad on kohandatud patareitoitele.
ZigBee toetab kolme tüüpi võrguarhitektuure (joonis 10.8): täht (a), puu (b) ja silmus (c).
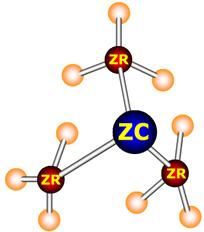
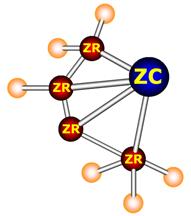
Joonis 10.8. ZigBee
ZigBee standardit võidakse tulevikus uuendada, kuid selle peamine eelis on juhtmevabade andurite võrkude ehitamise võimalus.
3. Andurite ja Mõõteseadmete Kalibreerimine ja Täpsus
3.1 Kalibreerimise olulisus Kalibreerimine on protsess, mille käigus anduri või mõõteseadme näidud kohandatakse vastavusse tuntud standardiga. See tagab mõõtmistulemuste täpsuse ja usaldusväärsuse. Kalibreerimata seadmed võivad anda eksitavaid tulemusi, mis võivad viia vigadele juhtimisprotsessis.
3.2 Mõõteseadmete täpsus Mõõteseadmete täpsus sõltub nii seadme enda kvaliteedist kui ka kalibreerimisest. Kõrget täpsust nõudvates rakendustes, nagu laboratoorsed mõõtmised või meditsiinilised seadmed, on äärmiselt oluline kasutada täpselt kalibreeritud ja kvaliteetseid mõõteseadmeid.
3.1. Andurite ja mõõteseadmete kalibreerimine ja täpsus
Andurite ja mõõteseadmete kalibreerimine on protsess, mille käigus seadme mõõtetäpsus tagatakse või korrigeeritakse, viies seadme näidud vastavusse kindlate viidetega. Täpsus viitab seadme võimele anda mõõdetavale suurusele väärtus, mis on võimalikult lähedane tegelikule väärtusele. Kalibreerimine ja täpsus on kriitilised aspektid, et tagada mõõtmiste usaldusväärsus ja kvaliteet, olgu tegemist tööstuslike protsesside, teaduslike katsete või meditsiiniliste rakendustega.
Kalibreerimise tähtsus
Kalibreerimine on oluline mitmel põhjusel:
- Täpsuse tagamine: Ilma kalibreerimiseta võivad mõõtmistulemused olla ebatäpsed, põhjustades vigu tootmises, teadustöös või meditsiinis.
- Konsistentsus: Tagab, et sama andur või mõõteseade annab eri aegadel ja tingimustes sarnased tulemused.
- Standarditega vastavus: Kalibreerimine on vajalik, et täita rahvusvahelisi ja tööstuslikke standardeid (nt ISO 9001), mis nõuavad kvaliteedikontrolli osana kalibreerimise dokumenteerimist.
3.2. Kalibreerimise protsess
Kalibreerimise käigus võrreldakse seadme näite viitemõõteseadme näitudega. Viitemõõteseade on kõrgema täpsusega ning selle kalibreering on jälgitav rahvusvahelistele standarditele, näiteks rahvuslike mõõteinstituutide (NIST, PTB, Metrosert) kaudu.
Kalibreerimise etapid:
- Ettevalmistus: Seade ja viitemõõteseade peavad olema töökindlad ja sobivates töötingimustes (temperatuur, niiskus, rõhk).
- Võrdlus: Andur või mõõteseade võrreldakse viitega, mille täpsus on vähemalt 10 korda suurem (mõõdetava suuruse puhul) kui kalibreeritaval seadmel.
- Hälvete määramine: Kui mõõdetud väärtused erinevad lubatud piiridest, tehakse vajalikud korrektsioonid või seadistus.
- Raport: Kalibreerimistulemused dokumenteeritakse ametlikus kalibreerimisprotokollis, kus esitatakse seadme täpsus ja kalibreerimise aeg.
3.3. Mõõteseadmete täpsus
Täpsus tähendab, kui hästi mõõteseade mõõdab tegelikku väärtust. Seda väljendatakse erinevates vormides:
- Absoluutne täpsus: Vahe seadme näidu ja tegeliku väärtuse vahel.
- Suhteline täpsus: Protsentuaalne erinevus tegeliku ja mõõdetud väärtuse vahel.
- Lineaarne täpsus: Viitab seadme võimele anda täpseid mõõtmistulemusi kogu mõõtepiirkonna ulatuses.
- Kordustäpsus: Viitab seadme võimele anda sarnaseid tulemusi, kui mõõtmist korratakse samades tingimustes.
Mõõteseadme täpsus on sageli määratud:
- Protsent viga täisskaalal: Näiteks, kui täisskaala ulatus on 100 ühikut ja täpsus on ±1%, võib mõõtmistulemus olla kuni ±1 ühik tegelikust väärtusest erinev.
- Erinevus tegelikust väärtusest: Näiteks täpsus 0,01 ühikut tähendab, et näit võib kõikuda tegelikust väärtusest 0,01 ühiku võrra.
3.4. Täpsust mõjutavad tegurid
- Temperatuur: Mõõteseadmed ja andurid võivad olla temperatuuri suhtes tundlikud. Näiteks, kui seade ei ole õigel temperatuuril, võib tema täpsus oluliselt väheneda.
- Hüsteerees: Mõõteseade võib anda erinevaid näitusid sõltuvalt sellest, kas mõõdetavat väärtust suurendatakse või vähendatakse.
- Lineaarne eksimus: Mõõtmistulemuste kõrvalekalle ideaaljoonest, eriti mõõtepiirkonna äärtes.
- Drift: Aja jooksul võib seadme täpsus muutuda, mistõttu on vajalik perioodiline uuesti kalibreerimine.
3.5. Andurite ja mõõteseadmete kalibreerimise meetodid
Kalibreerimismeetodid sõltuvad seadme tüübist ja mõõdetavast suurusest. Siin on mõnede levinud andurite ja seadmete kalibreerimise meetodid:
A. Temperatuuriandurid (nt termopaarid ja termistorid)
- Kuuma vanni kalibreerimine: Andur asetatakse täpse temperatuuri kontrollimiseks spetsiaalsesse temperatuurihoidmisvanni, mille temperatuur on teada ja stabiilne.
- Jääkpunkti meetod: Termopaari kalibreerimiseks kasutatakse jäävesi-vanni, kus temperatuur on täpselt 0°C.
B. Rõhuandurid
- Surnudkaalu tester: Kasutatakse mehhaanilist seadet, mis tekitab teadaolevat rõhku, millega võrreldakse rõhuanduri näitu.
- Manomeetriline meetod: Kasutatakse vedelikmanomeetrit, mis genereerib täpset rõhku.
C. Elektrilised mõõteseadmed (multimeetrid, vooluandurid)
- Elektrilised kalibraatorid: Kasutatakse täpseid kalibraatoreid, mis genereerivad teadaolevaid pingeid, voolusid ja takistusi, mille järgi saab mõõteseadme täpsust võrrelda.
D. Kaalud ja massiandurid
- Jälgitav masside kalibreerimine: Kaalud kalibreeritakse teadaolevate kaaluväärtustega, mis on sertifitseeritud rahvuslike või rahvusvaheliste standardite järgi.
3.6. Kalibreerimisintervallid
Kalibreerimine peab olema regulaarselt korduv protsess. Kalibreerimise sagedus sõltub:
- Seadme kasutussagedusest: Seadmeid, mida kasutatakse pidevalt, tuleb kalibreerida sagedamini.
- Keskkonnatingimustest: Raske või muutliku keskkonnaga seadmeid tuleb kalibreerida tihedamalt (nt kõrge temperatuur, vibratsioon, niiskus).
- Seadme kriitilisusest: Seadmed, mida kasutatakse täppismõõtmistes (nt meditsiinilised instrumendid), vajavad sagedasemat kalibreerimist.
Tavaliselt kalibreeritakse seadmeid vähemalt kord aastas, kuid kriitiliste süsteemide puhul võib intervall olla lühem.
3.7. Jälgitavus ja sertifitseerimine
Mõõteseadme kalibreerimine peab olema jälgitav rahvusvaheliste standarditeni. See tähendab, et kõik kalibreerimised peavad olema dokumenteeritud ja viidatud kõrgema täpsusega viitestandarditele. Sertifitseeritud kalibreerimislaborid pakuvad ametlikke kalibreerimistunnistusi, mis on vajalikud näiteks kvaliteedisüsteemide jaoks (ISO, EN standardid).
Kokkuvõte
- Kalibreerimine on mõõteseadmete ja andurite täpsuse tagamise protsess, mille käigus võrreldakse seadme näite kõrgema täpsusega viitestandarditega.
- Täpsus viitab seadme võimele mõõta tegelikku väärtust minimaalsete kõrvalekalletega.
- Täpsust mõjutavad tegurid hõlmavad keskkonnatingimusi, seadme lineaarset eksimust, hüstereesi ja driftimist.
- Regulaarsed kalibreerimisintervallid ja sertifitseeritud kalibreerimine on kriitilised, et tagada seadme töökindlus ja usaldusväärsus.

Ülesanne 1: Kalibreerimise etappide järjestamine Järjesta järgmised sammud õiges järjekorras:
- Seadme ja viitemõõteseadme ühendamine.
- Kalibreerimisprotokolli dokumenteerimine.
- Tulemuste võrdlemine viitega ja hälvete määramine.
- Keskkonna tingimuste kontroll ja seadme ettevalmistus.
Ülesanne 2: Kalibreerimise tulemuste analüüs Sul on järgmised andmed rõhuanduri kalibreerimisest:
- Viite väärtus: 1000 Pa
- Anduri näit: 1015 Pa
Arvuta hälve ja otsusta, kas see on lubatud ±1% täpsuspiirides. Kas andur vajab kalibreerimist?
Ülesanne 3: Temperatuurianduri täpsuse parandamine ja hälvete analüüs. Termopaar näitab jääveevannis temperatuuriks 0.3°C. Kirjelda, milliseid samme tuleks võtta, et termopaari kalibreerida, ja kuidas tagada, et edaspidi näit oleks täpne.
Sul on järgmised andmed jääveevanni katsest:
- Viite temperatuur: 0°C
- Termopaari näit: 0.3°C
- Lubatud täpsus: ±0.1°C
- Arvuta hälve ja analüüsi, kas termopaari näit jääb lubatud piiridesse.
- Kirjelda, milliseid samme tuleks võtta, et termopaari näit oleks täpne. Mida tuleks teha, kui hälve on suurem kui lubatud?
- Korrigeerimine: Kui termopaari kalibreeritakse, kontrollitakse tulemusi uuesti. Kirjelda, kuidas veenduda, et andur on täpselt kalibreeritud ja ei vaja täiendavaid parandusi.
Need ülesanded ja joonised aitavad paremini mõista kalibreerimise protsessi ja selle olulisust. Kas sooviksid mõnda konkreetset joonist või ülesannet põhjalikumalt lahendada?
4. Andurite ja Mõõteseadmete Rakendused
Andurid ja mõõteseadmed on kriitilised komponendid paljudes süsteemides ja tööstusharudes, kus on vaja jälgida, mõõta ja kontrollida erinevaid füüsikalisi suurusi. Need seadmed võimaldavad täpselt tuvastada muutusi keskkonnatingimustes, masinate seisundis, tootmisprotsessides ja palju muud. Järgnevalt käsitleme mõningaid peamisi valdkondi ja rakendusi, kus andurid ja mõõteseadmed mängivad keskset rolli.
4.1. Tööstuslik automaatika ja kontroll
Tööstuslikes rakendustes kasutatakse andureid ja mõõteseadmeid peamiselt masinate ja tootmisprotsesside automaatseks juhtimiseks. Temperatuuriandurid, rõhuandurid, vooluandurid ja asendiandurid aitavad jälgida ja optimeerida tootmist, tagades ressursside efektiivse kasutamise ja toote kvaliteedi.
- Näide: Toiduainetööstuses kasutatakse temperatuuriandureid, et tagada pastöriseerimisprotsesside temperatuuride täpsus, mis on oluline toidu ohutuse tagamisel.
4.2. Tervishoid
Meditsiinilised andurid on elulised patsientide jälgimisel ja diagnostilistes seadmetes. Nendeks anduriteks on südame löögisageduse monitorid, vere glükoosimõõtjad ja vererõhumõõtjad. Need andurid aitavad jälgida patsientide seisundit reaalajas ja võivad päästa elusid.
- Näide: Kaasaskantavad glükoosimõõturid kasutavad biokeemilisi andureid, et diabeetikutel aidata jälgida nende veresuhkru taset.
4.3. Transpordi ja logistika
Andurid on fundamentaalsed komponendid transpordiinfrastruktuuris, alates sõidukite jõudluse jälgimisest kuni liiklusohutuse tagamiseni. Kiiruseandurid, asukoha määramise seadmed (GPS) ja kiirendusmõõturid on mõned näited anduritest, mis on laialdaselt kasutusel nii isiklikus kui kaubanduslikus transpordis.
- Näide: Kaasaegsed sõidukid kasutavad rõhuandureid rehvides, et hoiatada juhti rehvirõhu languse eest, mis võib mõjutada sõiduki juhitavust ja ohutust.
4.4. Energeetika
Energiasektoris kasutatakse andureid nii tootmisprotsessides kui ka energia jaotamisel. Andurid aitavad jälgida elektrijaamade seisundit, tuulegeneraatorite toimimist ja päikesepaneelide tõhusust.
- Näide: Tuuleturbiinid kasutavad asendiandureid ja kiirendusmõõtureid, et optimeerida labade asendit vastavalt tuule kiirusele ja suunale, mis maksimeerib energiatootmist.
4.5. Keskkonnaseire
Andurid on üliolulised keskkonna seisundi ja muutuste jälgimisel. Temperatuuri, niiskuse, õhukvaliteedi ja veekvaliteedi andurid aitavad jälgida ja dokumenteerida keskkonnamuutusi, mis on olulised kliimamuutuste analüüsimisel ja ökosüsteemi tervise hindamisel.
- Näide: Veekvaliteedi andurid jõgedes ja järvedes võivad tuvastada saasteainete taset, aidates jälgida ja reguleerida veekogude seisundit.
Kokkuvõte
Andurite ja mõõteseadmete rakendused on äärmiselt laiaulatuslikud ja hõlmavad peaaegu kõiki tööstusharusid ja eluvaldkondi. Need seadmed on olulised mitte ainult tehnoloogilise arengu ja innovatsiooni jaoks, vaid ka igapäevaelu ohutuse, mugavuse ja tõhususe tagamisel. Tänu nende võimele pakkuda täpset ja ajakohast teavet, on andurid ja mõõteseadmed saanud asendamatuks osaks kaasaegses maailmas.
5. Linkide ja kirjanduse soovitused
5.1 Linkide Soovitused
- Andurid ja mõõteseadmed TTHK lehelt: TTHK põhjalik ülevaade anduritest ja mõõteseadmetest, mis sisaldab detailset infot erinevate anduritüüpide ja nende tööpõhimõtete kohta.
- National Instruments: Introduction to Sensors: Põhjalik juhend erinevatest anduritüüpidest ja nende rakendustest.
5.2 Soovitatav Kirjandus
- “Measurement and Instrumentation: Theory and Application” autorid: Alan S. Morris ja Reza Langari. See raamat pakub laiaulatuslikku ülevaadet mõõteseadmetest ja anduritest, sealhulgas nende tööpõhimõtetest ja rakendustest.
- “Sensors and Transducers” autor: Ian Sinclair. Käsitleb põhjalikult erinevaid anduritüüpe ja nende rakendusi.
- “Principles of Measurement Systems” autor: John P. Bentley. Keskendub mõõteseadmete süsteemsele lähenemisele ja pakub praktilisi näiteid.
Andurid ja mõõteseadmed on üliolulised tööriistad mitmesugustes valdkondades, alates tööstusautomaatikast kuni meditsiinini. Nende seadmete täpne mõistmine ja kasutamine on oluline, et tagada protsesside usaldusväärsus ja ohutus. Läbi selle materjali on sul võimalus saada süvitsi teadmisi erinevatest anduritest ja mõõteseadmetest, õppida nende tööpõhimõtteid ja mõista nende praktilist rakendamist.
Kontrollerid ja regulaatorid
Programmeeritavate kontrollerite rakendamine
Automatiseeritud töömasina juhtimissüsteemi kõige olulisemad osad on programmeeritav kontroller (PLC) ja selle juhtimisprogramm (kasutaja programm).
Iga automatiseeritud süsteem või masin omab kontrollerit. Sõltuvalt kasutatavast tehnoloogiast saab kontrollerid jagada pneumaatilisteks, hüdraulilisteks, elektrilisteks ja elektroonilisteks kontrolleriteks. Tihti kasutatakse nende kombinatsioone. Tehakse vahet riistvaraliselt (nt elektro-mehaaniline) ja tarkvaraliselt programmeeritavatel kontrolleritel. Esimest kasutatakse juhtudel, kus töömasina mistahes ümber-programmeerimine ei tule kõne allagi ja töö nõuab spetsiaalse kontrolleri väljatöötamist.
Kui aga teostatav töö ei nõua spetsiaalse kontrolleri väljatöötamist või kui kasutaja peab tegema programmis muudatusi, siis eelistatakse kasutada universaalset kontrollerit, mille programm salvestatakse elektroonilisse mällu. PLC on selline universaalne kontroller, millega saab süsteemi (protsesse) või töömasina funktsioone automaatselt juhtida aktiveerides neid loogilises järjekorras.
PLC algne ülesanne oli sisendsignaalide ühendamine vastavate väljunditega kindlaksmääratud programmi järgi. Binaaralgebra moodustab matemaatilise baasi selle operatsiooni (tehte) jaoks, mis tunnistab täpselt muutuja kahest määratletud olekust 0 ja 1 ainult ühte. Seega saab PLC väljund omada ainult neid kahte olekut.
Tänapäeva PLC ülesannete hulk on märgatavalt suurenenud: kontrollerid on võimelised teostama taimerite ja loendurite funktsioone, mälu väärtuste seadmist ja lähtestamist (nullimine), kõiki matemaatilised arvutusi.
Standard IEC 61131 defineerib PLC kui:
Digitaalselt toimiv elektrooniline süsteem, mis on mõeldud kasutamiseks tööstuslikus keskkonnas, mis kasutab kasutaja juhiste ja funktsioonide nagu loogika, järjestus, ajastus, loendus ja aritmeetika salvestamiseks programmeeritavat mälu ning kontrollib läbi digitaal- või analoogsisendite ja -väljundite mitmesuguseid masinaid või protsesse. Nii PLC kui ka sellega seotud välisseadmed on projekteeritud nii, et neid saab hõlpsasti integreerida tööstusliku juhtimissüsteemi ning neid saab kargelt kasutada kavandatud funktsioonide teostamiseks. [3]
PLCle esitatavad juhtimise, visualiseerimise ja üksiksüsteemide sidumise nõudmised üha kasvavad. Mitmed PLCd ühendatakse ühte võrku spetsiaalse andmeside liideste abil.
70. aastate lõpus täiendati PLCd. Olemasolevate binaarsete sisendite ja väljundite kõrvale lisati analoogsed sisendid ja väljundid. Paljud tänapäeva tehnilised rakendused vajavad analoogsignaalide töötlemist, mis võimaldab võrrelda suuruste etteantud analoogväärtusi tegelike mõõdetud analoogväärtustega.
Praegu turul pakutavad PLCd on kohandatud kliendi kasvanud nõudmistele ja on kasutatavad peaaegu igas rakenduses. Paljusid PLCd saab laiendada näiteks digitaal/analoog sisend/väljundmoodulitega, positsioneerimis- ja andmesidemoodulitega. Erilised PLCd on saadaval ohutustehnoloogia, laevandus- ja kaevandusülesannete jaoks. Peale selle on PLCd võimelised töötlema mitut programmi korraga ja on ühendatavad teiste automaatika komponentidega, kattes laia osa tootmise automatiseerimise rakendusest.
Programmeeritava kontrolleri riistvara
PLC on lühend kontrollerile, millega tähistatakse arvutit, mis on seotud töömasina andurite ja täituritega ning mis on kohandatud teatud tüüpi juhtimisülesannete jaoks. Lihtne PLC koosneb toite-, keskjuhtimis- ja signaalimooduli(te)st.
Toitemoodul (PS) varustab PLCd toitepingega, mis saadakse 120/230 V vahelduvvooluvõrgust (AC) või 24 V alalisvooluvõrgust (DC). Mõned PLCd ei vaja oma koosseisu toitemoodulit kui keskjuhtimismoodul saab 24 V DC toitepinge välisest toiteallikast (PLC saab elektrit eraldi toiteklemmide kaudu).
Keskjuhtimismoodul (CPU) on PLC aju mis töötleb automatiseeritud protsessi või masina juhtimisprogrammi, mis on salvestatud sisseehitatud programmimälusse. Peale juhtimisprogrammi töötlemist määrab CPU teiste PLCs olevate moodulite parameetreid, haldab andmesidet programmeerimisseadmega, PLC laiendusmoodulitega, teiste PLC(de)ga ja/või teiste seadmetega nagu näiteks operaatoripaneel. Keskjuhtimismoodul võib omada eraldi toitesisendit, mälulaienduspesa (SD kaardi jaoks) ja andmesideliidest.
Keskjuhtimismoodulil on spetsiaalne lüliti PLC töörežiimi valikuks. Praegused Siemensi PLCd omavad kaht töörežiimi: TÖÖ (RUN) režiim kasutaja programmi täitmiseks, ja STOPP (STOP) režiim, mil kasutaja programmi täitmine on peatatud. Mõlema töörežiimi ajal saab PLCst laadida üles programmeerimisseadmesse (personaalarvuti) või sealt alla PLCsse masina juhtimisprogrammi. Vanad Siemensi PLCd omasid ka kolmandat töörežiimi, mida kutsuti TÖÖ-P (RUN-P) režiimiks. Selliste PLCde puhul sai kasutaja laadida programme üles ainult STOPP või TÖÖ-P režiimis. TÖÖ režiimis täideti ainult kasutaja programmi ja samas ei saanud kasutaja programmi muuta (TÖÖ-P režiimis sai seda teha).
Signaalimoodulid (SM) on sisend-väljundmoodulid (I/O) digitaal- (DI, DO) ja analoogsignaalide (AI, AO) jaoks, mis tulevad anduritest kontrollerisse või lähevad sealt lülititesse, täituritesse ja teistesse seadmetesse. Signaalimoodul teisendab saabuvad signaalid niisugusesse vormi, mida PLC suudab töödelda ning toimetab vastupidiselt väljuvate signaalidega. Enamasti kasutavad digitaal-signaalimoodulid oma töös 24 V DC ja 120/230 V AC pinget. Analoog-signaalimoodulite juures on kasutusel alalispinge väärtusega kas ±10 V, 0 – 10 V või 1 – 5 V ja alalisvool väärtusega kas 4-20 mA või 0- 20 mA. Digitaal-väljundmoodulitest väljuvate signaalide muutmiseks on kasutusel optronid, transistorid ja releed, mis peavad kaitsma signaalmoodulit lühise, ülepinge ja ülekoormuse eest. Releedega saab lülitada erinevaid pingeid (DC ja AC) ja suuremaid voole kui transistoridega, kuid relee lubatud lülituste arv on tunduvalt väiksem kui transistoril. Üks digitaal-signaalimoodul võib omada 8, 16 või 32 sama tüüpi sisendit ja/või väljundit ning analoog-signaalimoodul kuni 2, 4, 6 või 8 sama tüüpi sisendit ja/või väljundit.
Peale eespool loetletud moodulite võib PLC omada veel kassetti/siin (millesse ehitatud andmeside siiniga ühendatakse PLC moodulid); liidesmoodulit (IM), mis ühendab mitmed eraldiseisvad kassetid üheks PLCks; funktsioonimoodulit (FM), mis tegeleb keeruliste või aeg-kriitiliste protsessidega CPUst sõltumatult (nt kiire loendamine, PID- ja positsioonjuhtimine), andmeside moodulit (CP), mis ühendab PLC tööväljasiiniga (nt Industrial Ethernet, PROFIBUS, ASi liides), jadaühendusmooduleid, kasutajaliidese 16 moodulit (nt operaatoripaneel); hajutatud sisend-väljund mooduleid; kiiretoimelisi signaalimooduleid.
Iga PLC moodul omab lihtsat kasutajaliidest andmeside, patarei, I/O, PLC operatsiooni jne olekute ning vigade näitamiseks. Kasutatakse ka väikseid vedelkristallekraane (LCD) või valgusdioode (LED).
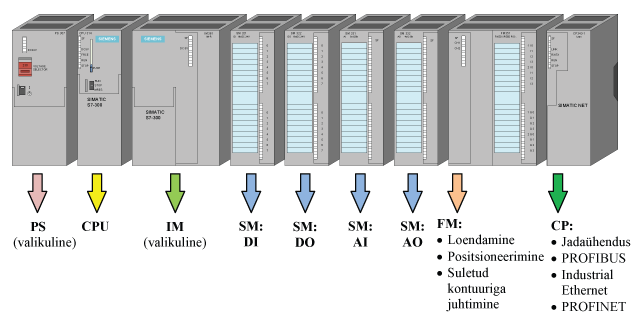 Joonis 2.1. Siemensi S7-300 PLC riistvaraline ülesehitus
Joonis 2.1. Siemensi S7-300 PLC riistvaraline ülesehitus
Joonisel 2.1 on kujutatud Siemens S7-300 kontrolleri koosseis [4]. PLC esimeses pesas peab olema PS, teises pesas CPU ja kolmandas pesas IM. Antud moodulite järjekorda Siemensi PLCs ei saa muuta. Nendele järgnevad (alates neljandast pesast) SM, FM ja CP moodulid (neid võib ühel siinil olla kokku 8 tükki). Nende moodulite omavaheline järjestus pole oluline. Üks Siemensi S7-300 PLC võib koosneda neljast eraldi seisvast siinist ja igal siinil võib olla kuni 11 moodulit.
Mõned Siemens PLCd ei vaja vahetult protsessorimooduli kõrvale toitemoodulit, kui automatiseeritud süsteem omab eraldi 24 V DC toiteseadet, mille väljund on ühendatud CPUga. Samuti võib loobuda IM moodulist, kui PLC kasutab ainult ühte siini.
Mõne firma PLCde juures pole CPU ja toitemoodulite omavaheline asetus oluline. Näiteks Allen-Bradley CompactLogix PLCs võib PS paikneda siinil erinevas pesas (enne PS võib paikneda kuni 4 moodulit), kuid CPU peab paiknema esimeses pesas.
PLC tüübid
Sõltuvalt sellest, missugune on CPU mooduli ehitus ja kuidas see on ühendatud teiste moodulitega, saab PLC jagada järgmisteks tüüpideks: kompaktne PLC, moodul-PLC, kassett-PLC, operaatorpaneeliga PLC, tööstusarvuti, kaart-PLC ja tarkvaraline PLC.
Kompaktses PLCs on CPU, PS ja SM paigutatud ühte väikesesse korpusesse. Sellisel PLC-l on kindel arv digitaal I/Osid (mitte üle 30), üks või kaks andmesideliidest (üks PLC programmeerimiseks ja teine tööstusandmesideks) ning HMI liides. Kompaktse PLCga saab ühendada lisamooduleid sisendite-väljundite arvu suurendamiseks. Lisamoodulid paiknevad samasuguses korpuses nagu kompaktne PLC [5].

Kompaktseid PLCsid kasutatakse automatiseerimisel releede asendusena. Üks PLC ei maksa rohkem kui käputäis releesid. Selle programmeerimine on sama paindlik kui juhtmetega releeskeemi koostamine. Sellist tüüpi PLC nõrgaks küljeks on vähene mälu programmi ja andmete jaoks, nõrk protsessori jõudlus, taimerite ja loendurite väike arv ning mõned puuduvad andmetüübid (nt komakohaga arv, string). Kallimad kompakt- PLCd omavad samu funktsioone nagu teised PLCd. Nende ainsaks puuduseks on kindel arv I/Osid.
Moodul-PLC on võimsam ja omab rohkem funktsioone kui kompakne PLC. Tema osad nagu näiteks CPU, SP, SM, servo-mootori juhtimismoodul, positsioneerimismoodul, CP moodul paiknevad eraldi korpustes. Moodul-PLC osad paigutatakse DIN-liistule või spetsiaalse kujuga kinnitusliistule ning need suhtlevad CPUga läbi sisese siinisüsteemi. Siinisüsteem võib olla üks osa CPUst, omada eraldi korpust või olla lamekaabel. Siinisüsteemi pesade arv on piiratud, kuid seda saab laiendada kasutades spetsiaalseid siinisüsteemi mooduleid (nt IM). Seega saab moodul- PLC koostada erinevatest moodulitest nii nagu automatiseeritav masin või protsess seda nõuab.

{kind=link}
Võrreldes kompakt-PLCga on moodul-PLC võimeline kasutama suuremal arvul sisendeid ja väljundeid, toetab suuri tööprogramme, suurte andmemahtude salvestamist ning on võimeline lahendama mitut erinevat ülesannet (tööprogrammi) korraga.
Moodul-PLC kasutatakse tänapäeval järgmiste ülesannete jaoks: masina automaatjuhtimine, -reguleerimine, positsioonjuhtimine, arvutamine, andmete töötlemine ja haldus, andmeside, jälgimine, veebi-server jne [5]. Moodul-PLC alla kuuluvada Siemensi S7-300 ja Allen-Bradley CompactLogix PLC (joonis 2.3).
Kassett-PLC omab peaaegu samu funktsioone ja võimalusi kui moodul-PLC. Ainuke erinevus seisneb kassetis või siinis, kuhu PLC moodulid paigutatakse. Kassett-PLCs kasutatav kassett omab pesasid PLC moodulite jaoks ja sisest siinisüsteemi, mis on integreeritud tagaseina ning mis võimaldab vahetada informatsiooni eri moodulite vahel. PLC moodulid omavad esipaneeli koos HMIga, nende korpuse tagumises osas on pistikud. Kassett-PLC eelisteks on kiirem andmeside PLC moodulite vahel ja moodulite kiirem toimimine [5].



Nagu operaatorpaneeliga PLC (OPLC) nimi juba ütleb, omab antud seade lisaks kontrollerile ka HMI liidest automatiseeritud protsesside või masinate juhtimiseks ja nende töö jälgimiseks. HMI osa koosneb enamasti ekraanist ja klaviatuurist või puuteekraanist. HMI ekraan võib olla tekstipõhine või graafiline. Sellise süsteemi eeliseks võrreldes tavalise PLCga, mis kasutab eraldiseisvat operaatorpaneeli, on see, et operaatorpaneeli ei pea eraldi programmeerima. Süsteemi juhtimisprogramm ja HMI liides koostatakse ühes tarkvarakeskkonnas. See aitab kokku hoida süsteemi arendamise aega. OPLC alla kuuluvad Unitronics M-90 ja Vision (joonis 2.5).
Tööstusarvuti on tavaline personaalarvuti, millesse on integreeritud PLC funktsionaalsus. PLC osa antud süsteemis võib põhineda riistvaral (kaart-PLC) või tarkvaral (virtuaalne PLC). Tööstusarvuteid kasutatakse keskmistes või suurtes automatiseerimisrakendustes, kus on oluline kiire protsessijuhtimine, kiire andmete kogumine ja vahetus koos OPC ja/või SQL serveritega (paigaldatud tööstusarvutisse), süsteemi hea jälgitavus ning selle pikk eluiga. Enamikel juhtudel kasutab tööstusarvuti andmesidet automatiseeritud protsesside ja/või masinate juhtimiseks. Samas võib omada sisseehitatud I/Osid ja teisi PLC mooduleid.
Tööstusarvuti oluliseks puuduseks on see, et teatud aja möödudes pole võimalik saada varuosi (nt mälu, protsessor, videokaart jne). See tähendab, et tootmises on uued paremad komponendid ja vanu komponente enam ei toodeta.
Kaart-PLC on spetsiaalne arvutisse paigaldatav kaart, mis omab kõiki tavalise PLC CPU funktsioone. Enamasti paigutatakse see arvuti emaplaadil olevale PCI pessa, mis võimaldab otsest andmevahetust arvutis oleva HMI ja/või teiste tarkvaraliste rakendustega. Kaart-PLCl on vähemalt üks andmesideliides tema ühendamiseks otse tööstuslikku andmesidevõrku (vahetada andmeid hajutatud I/O-dega või muude PLC seadmetega).
Tarkvaraline PLC on virtuaalne PLC, mis töötab tavalises personaalarvutis ja emuleerib riistvaralist kontrolleri CPUd. Automatiseeritud protsesside või masinate juhtimiseks kasutab see arvutis olevaid andmesideliideseid (Ethernet kaart, COM pesa) või arvutisse asetatavaid spetsiaalseid andmesidekaarte suhtlemaks hajutatud I/Odega ja teiste automaatseadmetega. Tarkvaralise PLC puuduseks on lisamälu puudumine andmete salvestamiseks. Toitepinge katkemisel (kadumisel) kaotatakse kõik protsessi juhtimisandmed, kuid sellest saab üle energiasalvestiga. Lisaks on arvuti operatsioonisüsteemi vahetumisel oht, et tarkvaraline PLC ei tööta uues süsteemis. Peale selle puudub garantii, et tarkvaralise PLCga samal ajal töötavad teised tarkvaralised rakendused (HMI või OPC server) ei mõjuta PLC tööd (nt protsessi juhtimise kiiruse vähenedamine, andmeside katkestused jne).
Tööstusarvutite alla kuuluvad Siemens kassett-tööstusarvuti (paigutatav 19 tollise kasseti sisse), tavaline tööstusarvuti ja tööstusarvuti operaatorpaneeliga (joonis 2.6). Tarkvaralise PLCna pakub Siemens SIMATIC WinAC RTX, mis vajab arvuti jaoks spetsiaalset andmeside võrgukaarti.


Joonis 2.6. Firma Siemens tööstusarvutid (vasakul on kassett-tööstusarvuti, keskel tööstusarvuti koos operaatorpaneeliga ja paremaltavaline tööstusarvuti ) [20]
{kind=link}
PLC poolt töödeldavad signaalid
Automatiseeritud protsessis mõõdetakse füüsikalisi suurusi nagu temperatuur, rõhk ja elektripinge. Samas PLC mõistab ja annab välja ainult elektrilisi signaale. Seetõttu vajavad signaalimoodulid füüsikaliste suuruste väärtuste vastuvõtmiseks ja väljasaatmiseks signaali muundureid. PLC puhul eristatakse kolme tüüpi signaale, millega ta on võimeline töötama: binaar-, digitaal- ja analoogsignaalid [6].
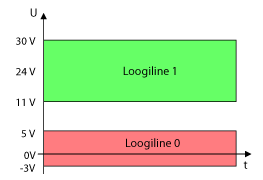
Joonis 2.7. 24 V DC binaarsignaali olekud
Binaarsignaal on 1 bitt signaal, mis omab ainult kahte väärtust (signaali olek 0 – madal, vale, ja signaali olek 1 – kõrge, õige). Binaarsignaali väljastavad näiteks surunupp ja lüliti, kui need ühendada pingestatud vooluahelasse. Normaalselt avatud kontakt (välist jõudu rakendamata püsib selline kontakt avatuna) edastab vooluahelas (loogika) signaali väärtusega 1 siis kui kontakt jõuga sulgeda ja (loogika) signaali väärtusega 0 kui kontakt jälle avada. Elektriseadmetes tuleb siiski arvestada teatud hälvetega. Seetõttu on standardis IEC 61131 määratud pinge väärtuse vahemikud loogika signaalile 0 ja loogika signaalile 1. IEC 61131 määratleb 24 V DC toitepingega kontaktivabade andurite väljundis pingevahemikku -3 – +5 V kui loogika signaali 0 ja pingevahemikku väärusega 11 – 30 V kui loogika signaali 1 (joonis 2.7). 230 V AC puhul annab pingevahemik 0 – 40 V loogilise väärtuse 0 ja pingevahemik 164 – 253 V loogilise väärtuse 1 [7].
Digitaalsignaal on binaarsignaalide jada, mis moodustab ühe terviku. Igat kohta digitaalsignaalis kutsutakse bitiks. Tüüpilised digitaalsignaali vormid on: terta – 4 bitti (ei ole laialdaselt kasutusel), bait – 8 bitti, sõna (word) – 16 bitti, topeltsõna – 32 bitti, topelt pikk sõna – 64 bitti (ei ole laialdaselt kasutusel). Tüüpiline digitaalsignaali kodeerimisseade on digitaalne numbrinäitaja.
Analoogsignaal esitab mingi suuruse (näiteks võimsuse) kohta mõne teise füüsikalise suuruse väärtuse, näiteks pinge 0 – 10 V. Nüüdisaegsed PLCd pole veel võimelised töötlema reaalseid analoogsignaale, seetõttu muundatakse kontrollerisse sissetulev analoogsignaal digitaalsignaaliks ja väljuv digitaalsignaal muundatakse analoogsignaaliks. Signaalimuundamine toimub analoog SMs. Kui digitaalsignaalis kasutatakse rohkem bitte (nt 8 biti asemel 13 bitti), saavutatakse suurem eraldusvõime ja analoogsignaali suurem täpsus. Tüüpilise 0 – 10 V väärtusega analoogsignaali viga võib digitaalsignaaliks muundamise järel olla 0,1 V, 0,01 V või 0,001 V (vastavalt digitaalsignaalis kasutatavate bittide arvule) [8].
Kuidas PLC töötab?
PLC toimib tsükliliselt (joonis 2.8). Iga PLC sisene tsükkel algab PLC sisese hooldustööga nagu mälu haldamine, diagnostika jne [9]. See osa tsüklist tehakse operatsioonisüsteemi abil nii kiiresti, et kasutaja ei märka seda.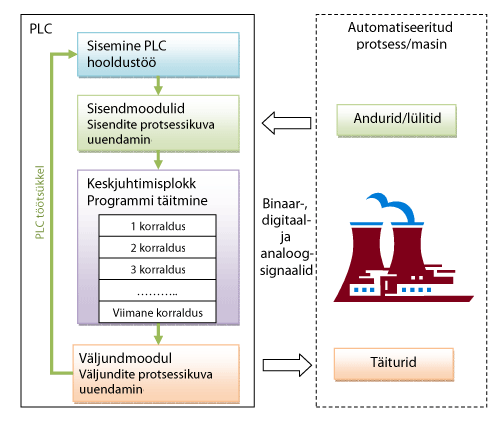
Joonis 2.8. PLC töötsükkel
Järgmine samm on PLC sisendite pildi ehk protsessikuva uuendamine. SM moodulites mõõdetakse sisendite väärtused ja muudetakse binaar- või digitaalsignaalideks. Need signaalid saadetakse sisese siinisüsteemi kaudu CPUsse ja salvestatakse sisendite andmemälus (sisendite protsessikuva). Peale seda hakkab CPU täitma programmimälus olevat kasutaja programmi (korraga täidetakse üht korralduserida), mis on MC7 masinkoodis (sarnaneb Siemens PLC programmeerimiskeelega käsulist) [10]. See tähendab, et kõik teistes PLC programmeerimis keeltes kirjutatud programmid tõlgitakse MC7 keelde enne nende salvestamist PLCsse. Programmi (korralduserea) täitmise käigus määratakse väljundsignaalidele uued väärtused ja need salvestatakse väljundite andmemällu (väljundite protsessikuva).
Viimane samm on väljundite väärtuste uuendamine. Pärast programmi viimase korralduserea täitmist saadetakse väljundite andmemälus olevad binaar- või digitaalsed signaalid SM moodulitesse, kus need muundatakse täituritele arusaadavasse vormi (nt analoogsignaalideks) ja saadetakse sealt edasi täituritele. Kui PLC töötsükkel on läbi saanud, siis PLC alustab uue tsükliga. Nii töötab Siemens S7-300 PLC.
Siemens PLC S7-300 PLC täidab kohe käivituse järel (esimese tsükli kestel) spetsiaalset käivitusprogrammi ,mida nimetatakse külmkäivituseks “cold start” või soekäivituseks “warm start”. Peale esimest tsüklit hakkab Siemens PLC täitma (kasutaja) põhiprogrammi. Mõnikord katkestatakse põhiprogrammi täitmine mingi sündmuse toimumise tõttu (nt vajutati hädaavarii nuppu, SM riistvara läks katki või mingi ajavahemiku järel tuleb täita teatud kindlat programmilõiku). Peale katkestuste poolt käivitatud programmi täitmist jätkab PLC jälle põhiprogrammi täitmisega.
Teiste ettevõtete PLC töötsüklid võivad olla teistsuguse ülesehitusega. Nt Allen-Bradley CompactLogic PLCs toimub I/O signaalide väärtuste uuendamine programmi täitmise ajal, mitte enne või pärast seda.
Multitegumtöö
Tänapäeva PLCd on võimelised täitma automatiseeritud protsessi juhtimisel korraga mitut ülesannet. Iga ülesanne võib koosneda mitmest eraldi programmist. Tegelikult täidab PLC iga protsessor korraga ainult üht ülesannet (selle mingit programmi). Kuna protsessorid töötavad väga kiiresti, või kasutajale näida, et PLC täidab mitut ülesannet korraga.
Standard IEC 61131 määratleb ülesannet kui hierarhiliselt kõrgemat juhtimistasandit PLC programmide täitmisel. PLC on võimeline aktiveerima ülesande kas ajaperioodi (kutsutakse perioodiliseks ülesandeks) või sündmuse baasil (kutsutakse mitteperioodiliseks ülesandeks) ning selles mingi kirjutatud programmi (korralduste kogumiku) täitmist [11]. Perioodilisi ülesandeid täidetakse tsükliliselt programmeerija poolt määratud aja möödudes. Mitteperioodilisi ülesandeid täidetakse käimasoleva ülesande koosseisus oleva programmi töös konkreetse sündmuse ilmnemisel (nt mingi andmeelemendi või signaali väärtus muutub 0 → 1).
Tootmisprotsessis multitegumtöö organiseerimisel määrab ülesannete tähtsuse ehk prioriteedi programmeerija. Prioriteedinumbri väärtus algab nullist ja see tähistab kõrgeimat prioriteeti. Suurem prioriteedinumber tähendab täitmisel väiksemat prioriteeti. Kui PLC töös püüavad mitu ülesannet kasutada CPU protsessorit samal ajal, siis määrab ülesande prioriteedinumber esimesena täidetava ülesande. Alustatakse kõige kõrgema prioriteediga ülesande täitmisest ja teised jäävad ootama. Kui mitmel täitmist ootaval ülesandel on sama prioriteet, siis peale eelmise ülesande täitmise lõpetamist (CPU protsessor saab vabaks) alustatakse pikima ooteajaga ülesande täitmist.
Kui mingi programm PLCs ei ole seotud ühegi ülesandega, siis omab see programm kõige madalamat prioriteeti ja seda täidetakse ainult siis, kui protsessor pole hõivatud [5].
Multitegumtöö jagatakse vastavalt ülesande täitmise katkestusele kaheks: eesõiguseta ja eesõigusega multitegumtöö. Eesõiguseta multitegumtöös täidetakse ülesanne lõpuni isegi siis, kui kõrgema prioriteediga ülesanne nõuab täitmist. Järgmisena jätkatakse kõige kõrgema prioriteedi ja pikima ooteajaga ülesande täitmisega. Eesõigusega multitegumtöös täidetakse mingit ülesannet seni, kuni kõrgema prioriteediga ülesanne muutub aktiivseks ja katkestab eelmise ülesande tegevuse. Seega väiksema prioriteediga ülesande täitmine on ooterežiimis seni, kuni kõrgema prioriteediga ülesande tegevus on täidetud. Eesõigusega multitegumtöös sama või väiksema prioriteediga ülesanded ei saa katkestada täidetavat ülesannet. Need peavad ootama kuni käesolev ülesanne on täidetud/lõpetatud. Peale katkestatud ülesande täitmise lõpetamist jätkatakse kõige kõrgema prioriteedi ja pikima ooteajaga ülesande täitmist.
Standard IEC 61131 määrab kindlaks ülesannete täitmise reeglid. Programmeerija peaks neid reegleid teadma [5,11].
- Ülesannet täidetakse, kui see on välja kutsutud (perioodiliselt või mingi sündmuse aktiveerumisel), ja teised allpool esitatud tingimused ei ole aktiivsed. See tähendab, et PLCl on vaba aega ülesande täitmiseks.
- Kui ootel on rohkem kui üks ülesanne, võetakse täitmisele neist kõrgema prioriteediga ülesanne. Eesõigusega multitegumtöös katkestatakse ülesande täitmine, kui uus aktiveeritud ülesanne omab täidetavast ülesandest kõrgemat prioriteeti. Eesõiguseta multitegumtöös peab uus aktiivne ja kõrgema prioriteediga ülesanne ootama täidetava ülesande tegevuse lõpetamist. Kui väljakutsutud ülesanne (kehtib mõlema multitegumtöö puhul) omab võrreldes täidetava ülesandega sama või väiksemat prioriteeti, siis antud ülesanne peab ootama täidetava ülesande tegevuse lõpetamist. Kui täidetav ülesanne ja täitmist ootav ülesanne jagavad mõningaid programmilõike (programm, funktsiooni plokk, funktsioon), siis täidetakse neid programmilõike. Teisi täitmist ootava ülesande programmilõike ei täideta.
- Kui PLCs on ootel mitu sama prioriteediga ülesannet, siis vaba CPU protsessori korral hakatakse täitma pikima ooteajaga ülesannet.
- Programmid (-osad/lõigud), mis pole seotud ühegi ülesandega, omavad kõige madalamat prioriteeti. Neid täidetakse, kui muude ülesannete tegevus või nende endi tegevus on lõpetatud.
Mõned PLCd võivad omada kahte või enamat protsessorit CPUs. Sellised PLCd saavad täita mitut ülesannet üheaegselt (multitegumtöö reaalajas) ilma ajalise viivituseta. See võimaldab kiirelt reageerida protsessi või masina mitte regulaarsele käitumistele.
PLC programmeerimine
Standard IEC 61131-3
Modernsed programmeerimistööriistad peavad vastama teatud nõudmistele, et nendega saaks luua odavaid ja piisava funktsionaalsusega tehnilisi rakendusi. Arendustöö efektiivsuse tõstmiseks erineva otstarbega automatiseeritud seadmete loomisel kasutatakse tihti erinevaid programmeerimiskeeli. Rakenduse programmide loomiseks ja kergeks muutmiseks on vajalikud sellised võimalused nagu rakendamiseelne (Offline) programmi testimine ja simuleerimine, programmi muutmine PLCs tehnilise rakenduse töö ajal (Online) ning PLCs oleva tegeliku programmi dokumenteerimine. PLCs olevad programmilõigud peavad pärast dokumenteerimist olema korduskasutatavad. Arendusel tuleks kasutada avatud (standardse) liidesega programmeerimissüsteemi. Rahvusvahelise standardi IEC 61131 kasutuselevõtmisega astuti suur samm edasi nende nõudmiste täitmisel. Selle standardi eesmärgiks on vähendada väljaõppekulusid, samuti suurte komplekssete programmisüsteemide loomise ja rakendamise kulusid.
Kuna see standard on väga detailirohke, siis ei rakenda eri firmad oma programmeerimissüsteemides kõiki selles standardis kirjeldatud võimalusi. Standard pakub välja võimaluse kirjeldada funktsionaalseid nõudmisi tabeli abil. Tootja peaks tabelis ära märkima need funktsioonid, mida nende tarkvaratööriist täidab ja missuguses ulatuses. Paljud PLC tootjad toetavad standardit, kuid nende tööriistade vastavus standardi nõudmistele kõigub laias ulatuses. Eri firmade programmeerimistööriistade täieliku vastavuse saavutamine ei ole kerge ülesanne.
Standardi kolmandas osas (IEC 61131-3) kirjeldatakse PLC programmeerimiskeeli. Tekst ühtlustab laialdaselt kasutatud programmeerimiskeeled üheks harmoniseeritud versiooniks pidades silmas ka tuleviku võimalusi [11].
Programmi ülesehituse plokk
Standardis IEC 61131-3 nimetatakse funktsionaalseid plokke, millest moodustatakse kõik programmid ja projektid, nn programmi ülesehituse üksusteks (POU-deks). Tavapärases programmeerimiskeskkonnas vastavad nendele programmiplokid, juhtimisplokid, järjestusplokid ja funktsiooniplokid [12]. Standardi üks oluline eesmärk on piirata eri plokitüüpide mitmekesisust ja seega lihtsustada nende kasutamist. Standard määratleb järgmised POU tüübid: funktsioon (FUN), funktsiooniplokk (FB) ja programm (PROG).
Funktsioon on POU, mis võib omada määratud väärtustega parameetreid, kuid mitte staatilisi muutujaid, st funktsiooni muutujate väärtusi ei peeta meeles (mälus) – samade sisendväärtuste puhul annab funktsioon alati ühesugused väljundväärtused. Sellised on näiteks analüütilised funktsioonid.
Funktsiooniplokk on POU, mis omab staatilisi muutujaid ja tema väljundite väärtus sõltub sisendmuutujate väärtustest, samuti ka plokisisestest muutujatest ja nende väärtustest. Plokisiseste muutujate väärtused peetakse funktsiooniploki töö vaheajal meeles (hoitakse mälus). PLC programm koosneb peamiselt just funktsiooniplokkidest.
Programm on loogiliselt kõrgematasemeline POU, mida tavalises PLCs kutsutakse peaprogrammiks. Multitegumtöö võimekusega PLCs saab üheaegselt täita mitut peaprogrammi ehk teisiti öeldes mitut ülesannet. Kõik kontrolleri füüsiliste aadressidega seotud muutujad (milleks on näiteks PLC sisendid, väljundid ja mälumuutujad) tuleb siin deklareerida. Muudes aspektides käitub see POU nagu FB.
Firma Siemens lõi programmeerimistööriista STEP 7 oma kontrolleriseeriate S7-300 ja S7-400 programmeerimiseks [9]. Programmeerimiskeskkonnas STEP 7 on POUd natuke teistmoodi koostatud. Funktsioon (FC) on samasugune kui standardis IEC 61131-3. Funktsioonplokiga seotakse aga eraldi (piirkonnas) salvestatud andmete plokk – (DB), mis standardis IEC61131-3 on defineeritud kui funktsiooniploki sisene osa. Programmi nime kasutamise asemel kasutab STEP 7 niinimetatud juhtplokke tähisega OB, mida aktiveeritakse tsükliliselt PLC operatsioonisüsteemi poolt ja mis moodustab liidese kasutaja programmi ja PLC operatsioonisüsteemi vahel.
OB on kontrolleri struktuuris (ülesehituses) eriline vahend programmi töötlemisnõuete täitmiseks. OB sees oleva programmi kirjutab programmeerija, kuid see aktiveeritakse (hakatakse täitma) PLC operatsioonisüsteemi poolt teatud tingimuste korral. Nt iga CPU käivitamisel (lülitades TÖÖ režiimi) täidetakse OB 100 või OB 101 kirjutatud programmi. Seega reageerib kontrolleri operatsioonisüsteem kindlale sündmusele aktiveerides sellele vastava OB. Tabelis 3.1 on ära toodud erinevad OB tüübid vastavalt nende funktsionaalsusele ja aktiveerimise tingimustele. Tabel 3.1. STEP-7 juhtplokid
| OB tüüp | OB number | Aktiveerimise sündmus ja rakenduse kirjeldus |
|---|---|---|
| Tavaliselt tsükliliselt täidetav | 1 | Aktiveeritakse peale iga CPU käivitamist ja selle järel tsükliliselt, et töödelda peamist kasutaja programmi. |
| Kellaaeg-päev katkestus | 10 – 17 | Aktiveeritakse kasutaja poolt määratud ajal ja päeval, et töödelda kasutaja programmi mingil kindlal päeval ja kellaajal. |
| Ajaline viivitus katkestus | 20 – 23 | Programmi osade täitmine aktiveeritakse kasutaja poolt määratud ajavahemiku möödumisel. |
| Tsükliline katkestus | 30 – 38 | Aktiveeritakse tsükliliselt määratud ajaintervallide (nt 500 ms) järel, et täita programmi (nt PID kontuur) kindla intervalli järel. |
| Riistvaraline katkestus | 40 – 47 | Aktiveeritakse siis kui esineb protsessiseadme või mooduli algatatud katkestus, et täita kasutaja ettekirjutatud hooldusrutiini. |
| Paralleelarvutuse katkestus | 60 | Aktiveeritakse katkestuse esinemisel, mille tekitab üks CPU mitme CPU-ga süsteemis, et täita kasutaja poolt kirjutatud sünkroonseid tegevusi. |
| Varunduse nõudest tingitud katkestus | 70 – 73 | Aktiveeritakse S7-400 H süsteemis varunduse vea ilmnemisel (üks PLC omab mitut CPUd), et täita kasutaja kirjutatud reaktsiooni. |
| Asünkroonse vea katkestus | 80 – 87 | Aktiveeritakse PLC süsteemiga seotud vea ilmnemisel (nt toitemooduli rike, mooduli tõrge), et täita kasutaja poolt määratud hooldusrutiini. |
| Vähetähtsa programmi töötlemine | 90 | Aktiveeritakse, et täita mittekriitilist programmi, kui PLC antud hetke tsükliaeg on väiksem kui kasutaja poolt määratud väikseim tsükliaeg. |
| CPU käivitused | 100 – 101 | Aktiveeritakse iga kord CPU käivitamisel enne OB 1, et täita initsialiseerimise programmi üks kord igal CPU käivitamisel. |
| Sünkroonne vea katkestus | 121 – 122 | Aktiveeritakse programmi tsüklilise täitmisega seotud vigade ilmnemisel, et täita kasutaja poolt kirjutatud hooldusrutiine. |
STEP 7 funktsiooniplokid (FB) on mõeldud algoritmide koostamiseks. Funktsiooniplokis loodud või kasutatud andmed peavad olema kättesaadavad selle ploki igakordsel aktiveerimisel. Sellise nõude täitmiseks tuleb kasutada andmete plokke (DB) koos funktsiooniplokkidega. Ühe FBga võib vajadusel siduda mitu DBd.
Peale programmeerija poolt programmis kasutamiseks mõeldud plokkide (OB, FB, FC ja DB) on STEP 7-s veel kolme eritüüpi süsteemiplokke (SFB, SFC ja SDB), mis on integreeritud PLC operatsioonisüsteemi. Kasutaja saab neid kasutada (aktiveerida) oma programmis. Need süsteemiplokid võimaldavad lahendada paljusid tavalisi ülesandeid ja funktsioone ning vähendavad seetõttu oluliselt programmi arendamise aega. Süsteemiplokkide sisu ei saa muuta ja vaadata (need on vastavate tegevuste eest kaitstud).
Kuna FC saab defineerida ainult ajutisi muutjaid (FC järgmise aktiveerimise ajaks on nende muutujate väärtused mälus kustutatud), siis ei seota DB STEP 7 FCga. FC (nagu FB) on võimeline lugema ja kirjutama andmeid globaalses DBs. STEP 7 võimaldab aktiveerida FBdes ja FCdes olevaid alamprogramme OB, FC ja FB plokkide abil (joonis 3.1).
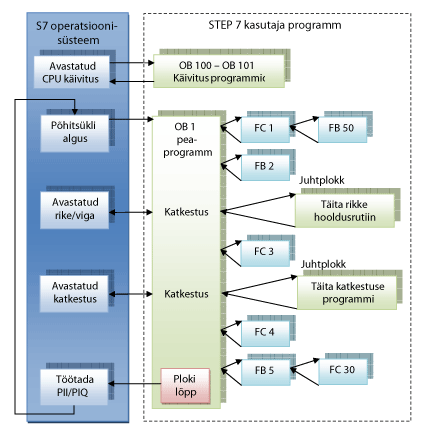
Joonis 3.1. Tsükliline programmi täitmine PLCs
Iga STEP 7-s kasutatav plokk koosneb segmentidest (Network). Blokis võib olla kuni 999 segmenti ja ühes segmendis saab olla kuni 2000 korraldust (STL keeles käsurida).
S7-300 ja S7-400 PLCs toimub rakenduse (tavalise) programmi tsükliline täitmine OB1 kaudu. Pärast toite sisselülitamist ja CPU lülitamist TÖÖ režiimi aktiveeritakse ja täidetakse OB 1 igal PLC tsüklil kuni CPU TÖÖ režiim katkestatakse või toide lülitatakse välja. Kuna OB 1 täidetakse tsükliliselt, siis tuleb teised plokid selle abiga aktiveerida (välja kutsuda). Kui mingi plokk oli aktiveeritud OB 1 poolt ja see lõpetas oma tegevuse, siis antakse programmi juhtimine tagasi OB 1le. Siemensi PLC kasutab OB juures prioriteedinumbreid. Kõrgema prioriteediga OB katkestab madalama prioriteediga OB täitmise. PLC programmi tsükliline täitmine on piltlikult esitatud joonisel 3.1.
PLCs kasutatavad andmetüübid
Standardis IEC 61131-3 on määratletud grupp andmetüüpe üldnimega elementaarsed andmetüübid. Nende tähised on esitatud tabelis 3.2. Andmetüüpe iseloomustavad kasutatud bittide arv ja võimalik numbriliste väärtuste vahemik. Tabel 3.2. IEC 61131-3 elementaarsed andmetüübid
PLC-süsteemides kasutatavad andmetüübid on olulised, et täpselt määratleda, milliseid andmeid töötletakse ja salvestatakse. Siin on nimekiri PLC-s (programmjuhtimiskontrollerites) kasutatavatest levinud andmetüüpidest koos ingliskeelsete vastetega:
- BOOL (Boolean) – Tõeväärtus, mis võib olla True (tõene) või False (väär).
- INT (Integer) – Täisarv, tavaliselt vahemikus -32768 kuni 32767 (16-bitine).
- DINT (Double Integer) – Laiendatud täisarv, tavaliselt 32-bitine täisarv.
- REAL (Real Number) – Ujukomaarv (kahekomaarv), kasutatakse numbrite jaoks, mis sisaldavad murdosa.
- SINT (Short Integer) – Väike täisarv, mis võib olla 8-bitine täisarv (vahemikus -128 kuni 127).
- BYTE – 8 bitti ehk üks bait, mis sisaldab täisarvu või bitimustrit.
- WORD – 16 bitti (2 baiti), mis võib sisaldada kahendandmeid või täisarvu.
- DWORD (Double Word) – 32 bitti (4 baiti), kasutatakse suuremate andmete või numbrite salvestamiseks.
- TIMER – Taimeri andmetüüp, mida kasutatakse aja jälgimiseks ja juhtimiseks.
- COUNTER – Loenduri andmetüüp, mida kasutatakse sündmuste või tsüklite loendamiseks.
- STRING – Märgijada, mis sisaldab tähemärkide järjestust (tekstiline andmetüüp).
Need on põhilised andmetüübid, mida kasutatakse PLC-des erinevate ülesannete ja protsesside juhtimiseks. Konkreetne andmetüüp valitakse vastavalt rakendusele ja sellele, millist teavet on vaja töödelda.
| Boole | Märgiga täisarv | Märgita täisarv | Reaalarv | Aeg, kestus, kuupäev ja tähemärgi rida |
|---|---|---|---|---|
| BOOL BYTE WORD DWORD LWORD | INT SINT DINT LINT | UINT USINT UDINT ULINT | REAL LREAL | TIME DATE TIME_OF_DAY DATE_AND_TIME STRING |
Lisaks nendele saab kasutaja tuletada (luua) uusi andmetüüpe ja kasutada neid nagu elementaarseid andmetüüpe.Tabel 3.3. STEP 7 olevad andmetüübid
| Tüüp ja kirjeldus | Bittide arv | Formaat | Vahemik ja arvu tähistus (Väiksemast suurema väärtuseni) | Näide |
|---|---|---|---|---|
| BOOL (bitt) | 1 | Binaartekst | TRUE (signaal “1”)/FALSE (signaal “0”) | TRUE |
| BYTE (bait) | 8 | Kuueteist-kümnendarv | B#16#0 – B#16#FF | B#16#10 |
| WORD (sõna) | 16 | Kahendarv | 2#0 – 2#1111_1111_1111_1111 | 2#0001_0000_0000_0000 |
| Kuueteist-kümnendarv | W#16#0 – W#16#FFFF | W#16#1000 | ||
| BCD | C#0 – C#999 | C#998 | ||
| Märgita kümnendarv | B#(0,0) – B#(255,255) | B#(10,20) | ||
| DWORD (topelt sõna) | 32 | Kahendarv | 2#0 – 2#1111_1111_1111_1111_1111_1111_1111_1111 | 2#1000_0001_0001_1000_1011_1011_0111_1111 |
| Kuueteist-kümnendarv | DW#16#0000_0000 – DW#16#FFFF_FFFF | DW#16#00A2_1234 | ||
| Märgita kümnendarv | B#(0,0,0,0) – B#(255,255,255,255) | B#(1,14,100,120) | ||
| INT (Integer) | 16 | Märgiga kümnendarv | -32768 – 32767 | 1 |
| DINT (Int, 32 bitti) | 32 | Märgiga kümnendarv | L#-2147483648 – L#2147483647 | L#1 |
| REAL (komakohaga arv) | 32 | IEEE koma-kohaga arv | Ülemine piir: +/-3.402823e+38 Alumine piir: +/-1.175495e-38 | 1.234567e+13 |
| S5TIME (Simatic-aeg) | 16 | S7-aeg 10 ms sammudega | S5T#0H_0M_0S_10MS – S5T#2H_46M_30S_0MS ja S5T#0H_0M_0S_0MS | S5T#0H_1M_0S_0MS S5TIME#1H_1M_0S_0MS |
| TIME (IEC-Time) | 32 | IEC-aeg 1 ms sammudega, märgiga täisarv | -T#24D_20H_31M_23S_648MS – T#24D_20H_31M_23S_647MS | T#0D_1H_1M_0S_0MS TIME#0D_1H_1M_0S_0MS |
| DATE (IEC-kuupäev) | 16 | IEC-kuupäev 1 päeva sammudega | D#1990-1-1 – D#2168-12-31 | DATE#1994-3-15 |
| TIME_OF_DAY (aeg) | 32 | Aeg 1 ms sammudega | TOD#0:0:0.0 – TOD#23:59:59.999 | TIME_OF_DAY#1:10:3.3 |
| CHAR (kirjamärk) | 8 | ASC II -kirjamärk | “A”, “B” jne. | “O” |
STEP 7 abil PLC programmeerimisel kasutatavad elementaarsed andmetüübid on kirjeldatud tabelis 3.3 [13]. Mõned standardi IEC 61131-3 elementaarsed andmetüübid on STEP 7 keskkonnas määratud kui komplekssed andmetüübid. See võimaldab määratleda andmetüüpe, mis koosnevad rohkem kui ühest erinevast elementaarsest andmetüübist. Peale selle on STEP 7-s olemas parameeter andmetüübid, mis võimaldavad kasutada taimereid, loendureid ja plokke FCs ja FBs ametlike parameetritena.
Muutujate adresseerimine STEP 7 kohaselt
Muutujad deklareeritakse koos andmetüüpidega. PLC mälus on muutujad justkui kohahoidjad rakenduse spetsiifiliste andmete väärtuste salvestamiseks. Et paremini mõista konkreetset programmi ja selle muutujaid, kasutatakse sümboolset adresseerimist. See võimaldab määrata absoluutsele aadressile sümboolse nime. Globaalsete muutujate sümbolid deklareeritakse STEP 7 sümbolitabelis ja neid saab kasutada programmi kõikides plokkides. Muutuja nimi (sümbol) peab olema ainulaadne ja see võib esineda selles sümbolitabelis ainult üks kord. Plokkide (OB, FC ja FB) kohalikud muutujad ja nende sümbolid deklareeritakse vastava ploki deklaratsiooniosas. Neid muutujaid saab kasutada ainult selles plokis, kus ta deklareeriti. Sama nime võib vabalt uuesti kasutada mingis teises plokis, kui see seal uuesti deklareerida.
S7-300 PLC mooduli pesa numbrid siinil lihtsustavad I/Ode adresseerimist – mooduli asukoht (positsioon) siinil määrab esimese aadressi moodulis [14]. Pesa number 4 on esimene, mida saavad kasutada I/O moodulid. Seejuures neljandas pesas oleva digitaalsisendi (DI) mooduli andmete baidi aadress algab 0ga. Meeles tuleb pidada, et 16 sisendiga DI mooduli kasutamisel jääb aadressiväljal kaks baiti kasutamata. Järelikult algab järgmise mooduli andmete baidi aadress numbriga 4. Joonisel 3.2 on näidatud Siemens S7-300 PLC moodulite adresseerimine.
S7 mälu piirkondade adresseerimine
S7 PLC mälus on piirkonnad, mille poole saab kasutaja programmist pöörduda. S7-300 PLCs on need mälupiirkonnad: sisendite protsessikuva (I), väljundite protsessikuva (Q), mälubitt (M), perifeeria sisend (PI), perifeeria väljund (PQ), kohalik muutuja (L), taimer (T) ja loendur (C).
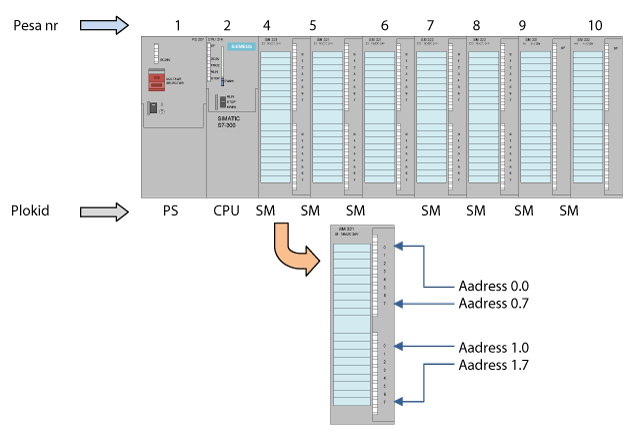
Joonis 3.2. Siemensi S7-300 PLC plokkide adresseerimine
Iga mälupiirkond on jagatud baitideks ja selles on võimalik ligipääs ka bittidele, baitidele (8 bitti), sõnadele (16 bitti) ja topeltsõnadele (32 bitti). Seejuures kasutab üks topeltsõna ära 4 baiti alates n baidist kuni n+3 baidini. Biti aadressile viidatakse alati unikaalse sümboliga, mis koosneb mälupiirkonna tähisest, millele järgnevad baidi ja punktiga eraldatud biti numbrid (nt I 28.3). Kui adresseerimisel viidatakse mälupiirkonnale nagu bait, sõna ja topeltsõna, siis lisatakse mälupiirkonna tähisele täht B, W või D (nt IB 7, IW 7, ID 7). Igast plokist saab ligi kõikidele mälupiirkondadele väljaarvatud kohaliku muutuja mälupiirkond. Joonisel 3.3 on kujutatud digitaalsete andmete jagunemine tüüposadeks ja nende paiknemine mälupiirkondades. Nagu näha, tuleb mälupiirkondade adresseerimisega ja kasutamisega olla väga ettevaatlik, et mitte kogemata üle kirjutada teiste andmete baite, kasutades nt programmis sisendite protsessikuva IW 0 ja IW 1. Kui programm muudab IW 0 väärtust, siis muutub ka IW 1 väärtus, kuigi programmis seda ei soovitud teha. Selle vältimiseks tuleks kasutada IW 1 asemel IW 2.

Joonis 3.3. Mälupiirkonna jagunemine ja andmestruktuuride paiknemine
PLC loeb programmi iga tsükli alguses sisendite olekud ja salvestab need sisendite protsessikuvasse (PII). Edasi määratakse programmi igas tsüklis ka väljundi olekud ja salvestatakse väljundite protsessikuvasse (PIQ). Programmi iga tsükli lõpus edastatakse saadud tulemused (väljundite väärtused) signaalimoodulitele, et teostada programmi käigus saadud tulemused reaalselt.
Perifeeria mälupiirkond (PI/PQ) võimaldab lugeda ja kirjutada andmeid otse PLC moodulitest(sse). Selle võttega kõrvaldatakse töötsüklis I/O olekute uuendusega seotud viivitused. Perifeeria mälupiirkonda kasutatakse ka analoogmoodulite andmete lugemiseks ja kirjutamiseks. Tsüklite vahel analoogmoodulite andmeid PLC mälus automaatselt ei värskendata.
Iga taimer kasutab STEP 7 keskkonna PLC taimeri mälupiirkonnas (T) üht sõna. Selle sõnaga antakse ajabaas ja etteantud aja väärtus. Taimerite adresseerimine algab T0-ga, siis T1 jne. Loenduri mälupiirkond (C) sisaldab loenduri juhiseid ja loendurit adresseeritakse samamoodi nagu taimerit: C0, C1 jne. Taimeri ja loenduri aadresse saab kasutada Boole operatsioonides nende olekute (töötavad, ei tööta) ja sõna operatsioonides taimeri või loenduri hetkväärtuse kontrollimiseks.
Konkreetset taimeri mälupiirkonda saab kasutada mingi taimeriga ainult üks kord. Kui see mälupiirkond antakse teisele taimerile, siis võib selguda, et mõlemad taimerid ei tööta või nad käituvad ettearvamatult. See kehtib ka loenduri mälupiirkonna kohta.
Lokaalset mälupiirkonda (L) kasutatakse ajutiste muutujate väärtuste haldamiseks. Kui ploki töö on lõpetatud, siis saab seda mälupiirkonda uuendada ja kasutada teise ploki juures. Selle adresseerimine sarnaneb sisendite ja väljundite protsessikuvale (nt L 31.5, LB 3, LW 3, LD 3).
PLC programmeerimiskeeled
Standardis IEC 61131-3 võimaldab kasutada PLC programmeerimiseks viit erinevat programmeerimiskeelt.
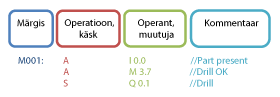
Joonis 3.4. IL (ka STL) struktuur
Käsulist (instruction list – IL) on masinale kohaldatud programmeerimiskeel, mida toetab enamus programmeerimistarkvarasid. Seda kasutatakse ka vahekeelena programmide tõlkimisel teistesse keeltesse. IL keeles programmi üks rida kirjeldab üht korraldust, mis PLC jaoks on üks täidetav käsk. See rida koosneb joonisel 3.4 kujutatud elementidest. Korraldus algab operatsiooni või käsu sümboliga, millele järgneb üks või mitu komadega eraldatud operandi/muutujat. Enne korraldust võib olla märgis kooloniga. Märgis tähistab programmisisest hüppe aadressi. Kui reas on kommentaar, siis kirjutatakse see rea lõppu ning ümarsulgude ja tärnide (* .. *) vahele. STEP 7-s kasutatakse kommentaari alguse tähistamiseks reas kaht kaldkriipsu //.
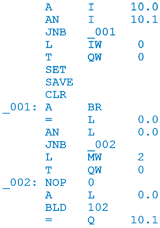
Joonis 3.5. STEP 7 STL keele näide
Märgiseid kasutatakse programmisisesteks hüpeteks ühelt programmi realt teisele, jättes mitu rida vahele. Standardis ei ole kirjeldatud hüpped programmi sees, kuid see on lubatud paljudes programmeerimissüsteemides, et parandada programmi täitmist ja lühendada selle aega.
STEP 7-s kutsutakse seda keelt Statement List’iks (STL). Programmiteksti näide on esitatud joonisel 3.5.
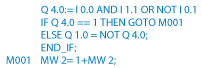
Joonis 3.6. STEP 7 SCL keele näide
Struktureeritud tekst (structured text – ST) on kõrgtasemeline programmeerimiskeel ülesannete juhtimiseks ja keeruliste matemaatiliste arvutuste tegemiseks. Selle keele eelised IL ees on väga lühikesed ja selged programmilõigud ning võimsad programmi käskude voo juhtimise elemendid. ST algoritm jagatakse mitmeteks sammudeks (avaldusteks), mida kasutatakse väärtuste arvutamiseks ja määramiseks, programmi juhtimiseks ning POUde kutsumiseks või katkestamiseks. Erinevalt ILst võib ST avaldus võtta enda alla mitu rida või on mingi programmilõik koondatud ühele reale.
Standard lubab kasutada ka teisi programmeerimiskeeli (nt C++), kui need täidavad standardis määratud algnõudeid.
STEP 7-s kutsutakse seda keelt struktureeritud juhtimiskeeleks (Structured Control Language – SCL). See sarnaneb programmeerimiskeelele PASCAL (joonis 3.6)
Funktsiooniplokkskeem (function block diagram – FBD) on graafiline keel aritmeetika, Boole või teiste funktsioonielementide ja -plokkide ühendamiseks. FBD keel on pärit signaali töötluse valdkonnast, kus on olulised reaal- või täisarvud. Praeguseks on sellest saanud universaalne programmeerimiskeel enamuse PLC jaoks.
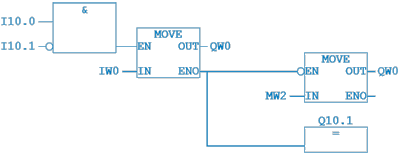
Joonis 3.7. STEP 7 FBD keele näide
FBDs kirjutatud programmi kood on jagatud lõikudeks, mida tuntakse segmentidena. Segmendid võimaldavad struktureerida programmi ülesehitust POUs. FBD segmendi graafiline osa sisaldab ristkülikuid ja programmi juhtimise avaldusi koos ühendatud horisontaalsete ning vertikaalsete joontega (joonis 3.7). Ristkülikute sisendid võivad olla ühendatud kas muutujatega, konstantidega või siis olla ka vabalt kasutamata.
FBD kasutatakse horisontaalseid ja vertikaalseid ühendusjooni, mis võivad hargneda mitmeks. Ühe sisendiga ei tohi ühendada mitut väljundit, kuna see võib põhjustada programmi käitumises ebakõlasid. Programmi juhtimiseks on eraldi olemas käsud lahkumiseks POUst ja segmentide töötlemise järjekorra muutmiseks.
FBDs hinnatakse segmendis oleva programmi täitmist järgmiste reeglite järgi:
- hinnatakse elemendi kõikide sisendite olekud enne selle sisu teostamist;
- mingi elemendi hindamine on läbi, kui kõik tema väljundid on väärtustatud;
- segmendi hindamine on läbi, kui selles olevate kõikide elementide väljundid on väärtustatud.
Kontaktaseskeem (Ladder Diagram – LD) on graafiline keel, mille abil seotakse Boole’i tüüpi muutujaid. LD on võrreldav varasemalt tuntud releeskeemidega, milles esitatakse graafiliselt energia liikumist elektriskeemis. Antud programmeerimiskeel on mõeldud Boole’i tüüpi signaalide (ÕIGE/VALE) töötlemiseks. LD keele segment on piiratud vasakult ja paremalt poolt vertikaalsete siinidega. Vasakult siinilt jõuab energia (loogika signaal väärtusega 1) kõikide temaga seotud elementideni (graafiliste sümboliteni). Sõltuvalt skeemielementide olekust lasevad need energial edasi liikuda paremale järgmise elemendini või katkestavad liikumise.
Nagu FBD puhul omab ka LD elementide ühendamiseks horisontaalseid ja vertikaalseid ühendusjooni ning sisaldab ristumispunkte. Kontakt LDis teostab sissetuleva joonega seotud (nimelise) muutuja väärtusega loogika operatsiooni. Teostatav loogikaoperatsioon sõltub kontakti tüübist. Operatsiooni tulemusel saadud väärtus antakse kohe edasi väljuvale joonele (ühendatud paremale poole).
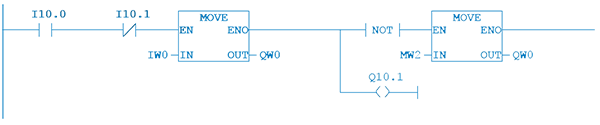
Joonis 3.8. STEP 7 LAD keele näide
Kõikide muutujate andmetüübid on Boole (ÕIGE/VALE) ja LD elementide vahelised seosed kannavad edasi ainult Boole väärtusi.
STEP 7 keskkonnas kustutakse seda keelt Ladder Logic’uks (LAD). Skeemi näide on esitatud joonisel 3.8.
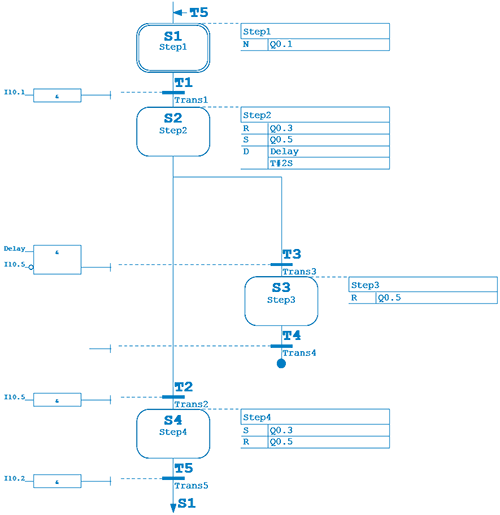
Joonis 3.9. STEP 7 S7-GRAPH keele näide
Järjestatud funktsioonide kaart (Sequential Function Chart – SFC) on graafiline programmeerimiskeel rakenduse (nt tootmisliin) juhtimisprotsesside jaotamiseks väiksemateks osadeks ja selle koosluse juhtimiseks. Graafiline skeem näitab ilusti protsessi voogu (liikumist teostusel) ja on seetõttu oluline tööriist PLC programmi struktureerimiseks. SFC keeles on võimalik saavutada rakenduse protsesside järjestikust ja ka paralleelset täitmist.
Väiksemate programmiosade (nt protsess, ülesanne) samm-sammuline täitmine sõltub nii programmi voos defineeritud tingimustest kui ka I/Ode käitumisest. Programmi samm programmeeritakse tavaliselt standardis IEC 61131-3 defineeritud teistes keeltes.
Esimene SFC struktureerimistase on segment koos selle alla kuuluva sammu ja siirde- elemendiga (joonis 3.9). Üks samm saab olla aktiivne või mitteaktiivne. Aktiivse sammuga täidetakse temaga seotud juhiseid (käskusid), kuni ta muutub mitteaktiivseks. Sammu oleku muutus aktiivsest passiivseks määratakse siirde tingimusega, mis esitatakse Boole avaldise kujul. Kui aktiivse sammu taga oleva siirdetingimuse väärtus muutub “ÕIGEKS”, siis aktiveerub selle siirde järel olev samm ja eelnev lõpetab. Siirde aktiveerimisega antakse eelneva sammu atribuudi “aktiivne” väärtus edasi järgmisele sammule või sammudele. Aktiivsus liigub läbi sammude, mis kõik koos moodustavad võrgu. Paralleelsete harude puhul programmis jagatakse “aktiivne” olek mitmeks osaks ning harude lõpus liidetakse see uuesti kokku.
STEP 7-s kutsutakse seda keelt Graphical Programming Language’ks (S7-GRAPH).
Siemensi PLC programmeerimistööriist STEP 7 sisaldab tavakeeli nagu STL, FBD ja LAD. Teised keeled nagu SCL ja S7-GRAPH tuleb eraldi juurde osta.
Programmeerimine standardi IEC 61499 abil
Andmevoogu ja loogilist protsessi täitmise jada saab programmeerida ja dokumenteerida standardi IEC 61131-3 graafiliste keeltega (LD, FBC, SFC), kuid samuti on vaja näidata graafiliselt (juhtimisseadmete) juhtimisprogrammide topoloogilist jagunemist, nende üldist konfiguratsiooni ja seoseid automatiseerimisprojekti teiste hajutatud osadega. Seda tehakse palju kõrgemal loogilisel tasemel kui POUde programmeerimine.
Keeruliste hajutatud rakenduste seadistamise tööriistu kutsutakse konfiguratsiooni redaktoriteks. Programmiosa moodustatakse suurematest üksustest funktsiooniplokkide sidumise teel. Keerulised hajutatud automatiseerimisülesanded omavad laialdast andmeside ja teostamise juhtimise struktuuri. Teostuse ajal toimub tihe andmevahetus erinevates kohtades paiknevate juhtimisseadmete vahel. Seejuures on kontrolleri programmid seotud võrgusõlmede ülesannetega ja programmide sisendid ning väljundid on omavahel seotud.
Standard IEC 61499 käsitleb hajutatud automatiseerimisrakenduste loomist, näiteks funktsiooniplokkide seadistamist füüsiliselt erineva ja geograafiliselt eraldatud juhtimisriistvara jaoks ning nende teostuse sünkroniseerimist [15].
Hajutatud automatiseeritud süsteemi programmi osade ja juhtimisriistvara elementide vastastikuse toime kirjeldamiseks kasutab IEC 61499 mitme tasemega hierarhilist mudelit:
- Süsteem
- Seade
- Ressurss/allikas
- Rakendus
- Funktsiooniplokk
Reaalses automaatikakeskkonnas toimivad erinevatest juhtimisseadmetest moodustatud rakendused süsteemina. Mingi konkreetne seade koosneb tema rakendusprogrammidest, liidesest andmesidevõrguga, liidesest automatiseeritud protsessiseadmete ning juhtimisseadme riistvaraga, milles need ressursid toimivad.
Ressurss on iseseisev täidetav tarkvaraline üksus koos parameetritega. Igas seadmes saab toimida mitu ressurssi. Ressurss koosneb funktsiooniplokkidest (vahetavad omavahel eriliste liideste abil sündmuste ja muutujate andmeid). Teenuse liidese funktsiooniplokk moodustatakse andmesideliidesest ja automatiseeritud protsessi kasutajaliidesest. Ülejäänud funktsiooniploki tüübid (ka kasutaja poolt loodud funktsiooniplokid) on aluseks tegelikule juhtimisprogrammile.
Rakenduse tase on kokku lepitud (reaalne) programmeerimistase. Sellel tasemel seotakse süsteemi funktsiooniplokid omavahel kokku sõltumata ressurssidest, milles need funktsiooniblokid töötavad. Seetõttu just see tase kirjeldab ära konkreetse rakenduse, mis võib iseenesest olla hajutatud mitmete ressursside vahel.
Funktsiooniplokid on siin väikseimad rakenduse (programmi moodustavad) üksused, mis standardi IEC 61499 järgi koosnevad enamasti kahest osast:
- täitmise juhtimine: sündmuste loomine ja töötlemine koos juhtimise sisendite ja väljunditega;
- algoritm (kasutaja programm) koos andmete sisenditega ja väljunditega ning sisemiste andmetega.
Konkreetne (protsessi, ülesande) algoritm programmeeritakse standardis IEC 61131-3 kirjeldatud keeltega ja selle juhtimist käsitlev osa SFC keele abil. Täitmise juhtimise diagramm (ECC) juhib algoritmi või selle osade täitmist sõltuvalt ajalise protsessi tegelikust olekust ja sissetulevatest sündmustest.
PLC juhtimisprogrammi loomine
PLC juhtimisprogrammi loomine koosneb järgmistest etappidest (joonis 3.10) [8]:
- spetsifikatsioon: protsessi või ülesande kirjeldus
- projekteerimine: rakenduse (e lahenduse) kirjeldus
- realiseerimine: lahenduse elluviimine
- integreerimine/kasutuselevõtt: lahenduse sidumine keskkonnaga ja katsetamine
Etapp 1: Spetsifikatsioon (probleemi sõnastamine)
Siin koostatakse rakenduse protsessi või ülesande detailne kirjeldus. See tegevus toob välja konfliktid, eksitused ja puudused tehnilistes nõuetes või spetsifikatsioonides. Antud etapi lõpuks on olemas:
- juhtimisprotsessi või ülesande suuline kirjeldus;
- tehnika struktuur/paigutus;
- rakenduse (lahenduse) umbkaudne struktuur.
Etapp 2: Projekteerimine (põhimõttelise lahenduse konkreetne vorm)
Protsessi või ülesande põhimõtteline lahendus töötatakse välja 1. etapi tulemuste alusel. See peab kirjeldama juhtimissüsteemi käitumist ning olema sõltumatu tehnilisest realiseerimisest. Antud nõudeid täidab funktsionaalne skeem (GRAFCET). Funktsionaalset rakendust (lahendust) saab samm-sammult täiustada, kuni see sisaldab kõiki osasid. Keerulise juhtimisülesande korral tuleks rakendus (lahendus) jagada üksikuteks osadeks. Need võivad olla erifunktsioonid, mida kasutatakse nt visuaalse liidese teostamisel või andmeside korraldamisel.
Etapp 3: Realiseerimine (põhimõttelise lahenduse programmeerimine)
Rakendusprotsessi või selle ülesande põhimõtteline lahendus tõlgitakse juhtimisprogrammiks kasutades standardiga IEC 61131-3 määratud programmeerimiskeeli (SFC, FBD, LD, IL ja ST). Juhtimissüsteeme, mis töötavad ajas vastavalt loogilisele protsessile, saab kergesti programmeerida SFC keeles. LD, FBD ja IL keeled sobivad põhioperatsioonide formuleerimiseks ja juhtimissüsteemide jaoks, mida saab kirjeldada lihtsate loogikaoperatsioonide või Boole’i signaalidega. Kõrgtasemelist ST keelt kasutatakse peamiselt matemaatilise sisuga programmiosade loomiseks, nagu nt juhtimisalgoritmide kirjeldamiseks.
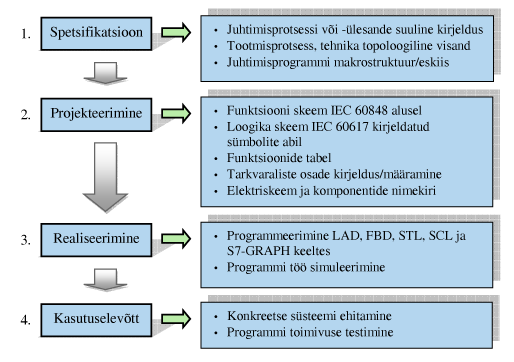
Joonis 3.10. Juhtimisprogrammi loomise etapid
Nii palju, kui PLC või selle programmeerimistarkvara seda etappi toetab, tuleb loodud juhtimisprogramme või programmiosi enne kasutuselevõttu testida (simuleerida). See võimaldab avastada vead ja kõrvaldada need juba algstaadiumis, hiljem võib vigade kõrvaldamine olla palju keerulisem ja kulukam.
Etapp 4: Kasutuselevõtt (juhtimisprotsessi või ülesande koostamine ja katsetused)
Siin katsetatakse kolmes eelmises etapis loodud automatiseeritud süsteemi ja tegelike tootmisseadmete koostööd. Kui juhtimisülesanded on keerukad, tuleb seda teha süstemaatiliselt samm-sammu haaval. Korrektselt toimides leitakse vead kergesti ja kõrvaldatakse need nii juhtimisprogrammist kui ka mujalt süsteemist.
Dokumentatsioon on süsteemi loomisel üks oluline ja kriitilise tähtsusega komponent, mida läheb hiljem vaja süsteemi hooldusel ja laiendamisel. Dokumentatsioon, sealhulgas juhtimisprogrammi kohta, peab olema saadaval nii paberil kui ka andmekandjal. See on vajalik kasutuse käepärasuse ja varukoopiate omamise huvides. Dokumentatsioon koosneb üksikute etappide aruannetest, juhtimisprogrammide väljatrükkidest ja juhtimisprogramme käsitlevatest mistahes võimalikest kirjeldustest, nagu [8]:
- probleemi kirjeldus
- tehniliste seadmete positsiooninumbritega visand või seadmete paigutus
- elektriskeemid
- klemmide ühendusskeem
- juhtimisprogrammide väljatrükid
- sisendite-väljundite (I/O) nimekiri
- täiendav dokumentatsioon
Binaarloogika funktsioonid
Funktsionaalset üksust, milles teostatakse binaarloogika põhioperatsioone, (näit. Boole loogikatehteid) nimetatakse loogikablokiks või ka lüliks. Graafiliselt kujutatakse lüli ristkülikuna, millel on sisendid ja väljundid. Binaarloogika põhioperatsioonide teostust saab kirjeldada ka erinevat tüüpi kontaktide abil.
NING- ja VÕI-lülid
Binaarloogika NING-lüli (tehte) väljundis on signaal väärtusega 1, kui selle kõikides sisendites on signaal väärtusega 1. Väljundsignaal on 0, isegi kui ainult ühes sisendis on signaal 0. Joonisel 4.1 on kujutatud binaarloogika NING-lülid LAD, FBD ja STL keeles. NING-lüli võib omada rohkem kui kaht sisendit.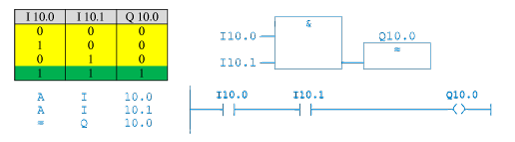 Joonis 4.1. Binaarloogika NING-lüli signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
Joonis 4.1. Binaarloogika NING-lüli signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
Binaarloogika VÕI-lüli (tehte) väljundis on signaal väärtusega 1, kui vähemalt ühes VÕI-lüli sisendis on signaal 1. Väljundsignaal on 0, kui kõikides sisendites on signaal 0. Joonisel 4.2 on kujutatud binaarloogika VÕI-lüli LAD, FBD ja STL keeles. VÕI-lüli võib omada rohkem kui kaht sisendit.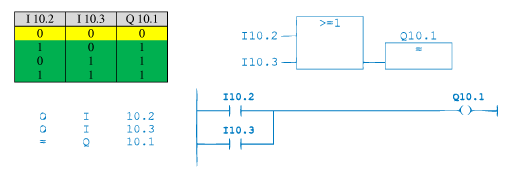 Joonis 4.2. Binaarloogika VÕI-lüli signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
Joonis 4.2. Binaarloogika VÕI-lüli signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
Tarkvara STEP 7 abil salvestatakse NING- ja VÕI-tehte tulemused PLC loogikaoperatsiooni tulemuse RLO bitti (RLO – result of logic operation). RLO biti väärtus ehk olek võib olla 1 või 0 [6]. NING- või VÕI-tehte algfaasis küsitakse esimese operandi signaali väärtust ja see salvestatakse kohe RLO bitti. NING- või VÕI-tehte teostamise järgmises faasis küsitakse ka teise operandi signaali väärtust, mis seejärel seotakse RLO bitti salvestatud väärtusega järgides binaaralgebra reegleid. Vahetulemus salvestatakse RLO bitti jne. Tehte teostamise lõpus salvestatakse RLO biti väärtus väljundlüli operandi(desse) või siis toimub programmis tingimuslik hüpe. Mõnikord on vaja (jõuga) muuta väljundlüli RLO biti väärtust 0 või 1 ilma mingi eelneva operatsioonita. Selleks saab kasutada STEP 7 STL keeles käske CLR ja SET.
NING- ja VÕI-lülidest saab koostada keerukamaid loogikatehteid nagu NING-VÕI- ja VÕI-NING-loogikaühendused [16]. NING-VÕI-loogikaühenduses on NING-tehte väljund ühendatud VÕI-tehte sisendiga. VÕI-NING-loogikaühenduse puhul on vastupidi. Joonisel 4.3 on kujutatud antud loogikaühendused FBD keeles.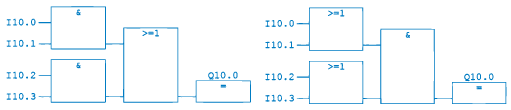
Joonis 4.3. NING-VÕI- ja VÕI-NING-loogikalülide kujutamine FBD keeles
NING-VÕI-tehte tulemuseks on signaal 1, kui vähemalt üks NING-lüli omab signaali 1. VÕI-NING tehte tulemuseks on signaal 1, kui mõlema VÕI-lüli tulemuseks on signaal 1.
Eitus
Binaarloogikas kasutatakse eitustehet sisendsignaali (operandi või muutuja) väärtuse inverteerimiseks ja edastamiseks lüli väljundisse. Eitustehte väljundsignaal on 1, kui sisendsignaal on 0 ja vastupidi. Joonisel 4.4 on kujutatud binaarloogika eitus LAD, FBD ja STL keeles.
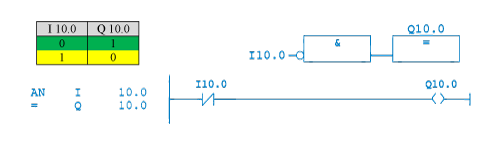
Joonis 4.4. Binaarloogika eituse signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
Eitust saab kasutada ka NING- ja VÕI-lüliga seotud väljundlüli juures (joonis 4.5). Eitusega NING-lüli kutsutakse EI-NING-lüliks (NAND) ja VÕI-lüli EI-VÕI-lüliks (NOR) [6].
Joonis 4.5. EI-NING- ja EI-VÕI-lülid FBD keeles
Loogikalüli operatsiooni (tehte) tulemuseks saadud väljundi (signaali) väärtust võib binaarloogika EI tehte abil ka inverteerida. Joonisel 4.6 inverteeritakse NING-lüli ja VÕI-lüli väljundi ja saadud tulemus antakse lisaväljundisse Q 10.4. 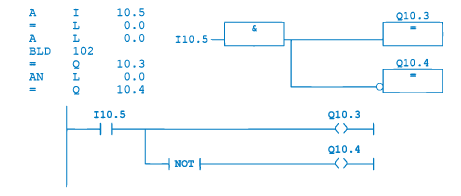
Joonis 4.6. Väljundi inverteerimine STL, FBD ja LAD keeles
VÄLISTAV-VÕI-lüli
Binaarloogika VÄLISTAV-VÕI-lüli (VVÕI) väljundsignaaliks on 1, kui selle lüli kahe sisendi signaalid on erineva väärtusega. Kui ühe sisendi signaal on 1 ja teise oma on 0 siis VVÕI-tehte tulemuseks on signaal 1. Joonisel 4.7 on kujutatud binaarloogika VVÕI-lüli LAD, STL ja FBD keeles.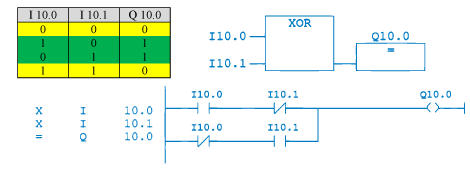
Joonis 4.7. Binaarloogika VVÕI-lüli signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
VVÕI-lüli võib omada rohkem kui kaht sisendit, sel juhul on VVÕI-lüli tulemuseks signaal 1, kui signaali 1 omavate sisendite arv on paaritu.
VVÕI-lüli saab kasutada koos NING- ja VÕI-lüliga.
SR- ja RS-trigerid
SR- ja RS-trigereid kasutatakse lüli sisendisse saabuva lühiajalise signaali oleku (eluea) pikendamiseks. Sisendsignaali väärtus salvestatakse lülis. Trigerid teostavad mälufunktsioone.
Joonistel 4.8 ja 4.9 on näidatud SR- (ülimusliku väljalülitamisega) ja RS- (ülimusliku sisselülitamisega) trigerid.
SR-trigeri väljundisse Q antakse signaal 1 kui trigeri sisendisse S (set) saabub signaal 1 ja sisendis R (reset) on signaal 0. See olek jääb kestma kuni trigeri väljalülitamiseni. Sisendi S signaali väärtuse muutus ei mõjuta väljundit Q, kui selle signaal on 1. Signaali 1 saabumisel sisendisse R muutub trigeri väljundi Q signaal 0 sõltumata sellest, milline on signaali väärtus sisendis S. Sisend R on ülimuslik. Seetõttu kutsutakse SR-trigerit ülimusliku väljalülitamisega trigeriks.
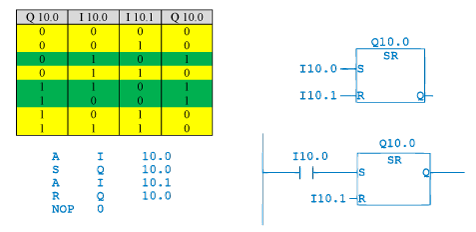
Joonis 4.8. SR trigeri signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
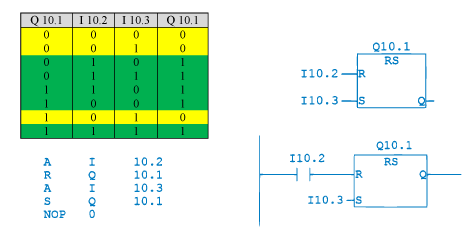
Joonis 4.9. RS trigeri signaalide olekutabel ja selle kujutamine FBD, STL ja LAD keeltes
RS-trigeri väljundile Q antakse signaal 0, kui sisendis R on signaal 1 ja sisendis S on signaal 0. Trigeri olek jääb kestma kuni selle toite väljalülitamiseni. Väljundi Q signaal muutub 1 kui sisendisse S saabub signaal 1 sõltumata sellest, milline on sisendi R signaal. Seetõttu kutsutakse seda ülimusliku sisselülitamisega trigeriks. Signaali väärtuse muutus sisendis S ei mõjuta väljundit Q, kui selle signaal on juba 1 ning sisendis R on signaal 0.
NING- ja VÕI-lülidest saab koostada SR- ja RS-trigereid (joonis 4.10).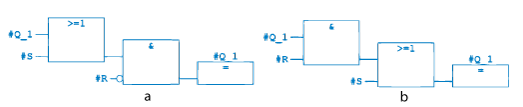
Joonis 4.10. NING- ja VÕI-lülidest koostatud SR- (a) ja RS-trigerid (b) FBD keeles
Operandi/muutuja väärtuse muutusi (ümberlülitusi) saab teha kasutajaprogrammi erinevates osades kasutades SET (S) ja RESET (R) funktsioone [6]. Nende funktsioonide kasutamne RS- ja SR-trigeris võimaldab teha eraldi sisse- ja väljalülitamise operatsioone. Puuduseks on ülevaate kaotamine programmis selle üle, mis tingimustel toimus mingi väljundi väärtuse muutus (trigeri lülitus). Samas saab üht sisendtingimust (signaali üht väärtust) kasutada rohkem kui ühe trigeri väljundi juhtimiseks (joonis 4.11). 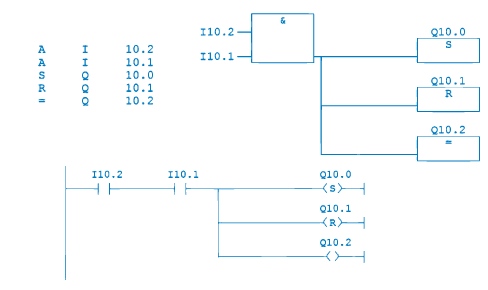
Joonis 4.11. SET ja RESET funktsioonide rakendamine STL, FBD ja LAD keeles
Signaali väärtuse muutuse avastamine
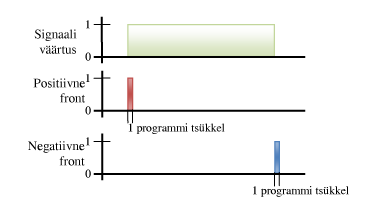
Joonis 4.12. Signaali väärtuse muutuse avastamise. Impulsi pikkus.
Füüsikalise signaali väärtuse muutumist mõõdetakse ja kasutatakse signaali oleku tuvastamiseks. Signaali väärtuse kasvamist (muutus 0 → 1) nimetatakse positiivseks frondiks ja signaali väärtuse vähenemist (muutus 1 → 0) negatiivseks frondiks [6]. Signaali väärtuse muutust kirjeldab lühike impulss väärtusega 1. Selle impulsi kestus on võrdne programmi 1 tsükli kestusega (joonis 4.12).
Signaali väärtuse muutuse (frondi) avastamiseks on PLCs olemas standardfunktsioon. Programmis tuleb kasutada eraldi operandi (muutujat), kuhu salvestatakse uuritava signaali olek programmi eelmises tsüklis. Signaali muutuse saab avastada ka NING-lüli ja SR- ja RS-trigeritega.
Tõusva (ehk positiivse) frondi funktsioon avastab sisendoperandi IO muutuse 0 → 1 (joonis 4.13). Sisendoperandi IO signaali hetkväärtust RLOs võrreldakse tema programmi eelmises tsüklis olnud signaali (frondi operand EO) väärtusega. Kui programmi eelmises tsüklis oli sisendoperandi IO signaal 0 ja nüüd on see 1, siis jääb RLO väärtuseks 1 ning impulsioperandi IPO signaal muutub “1” ainult antud programmi tsükli jaoks. Teiste juhtumite puhul on RLO ja impulssoperandi IPO signaalid 0. Frondi operandi EO salvestatakse programmi antud tsükli RLO olek, et seda võrrelda programmi järgmisel tsüklil sisendoperandiga IO [6]. 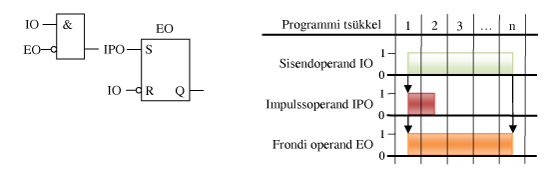
Joonis 4.13. Tõusva frondi avastamine NING-lüli ja SR-trigeri abil ja operandide signaali olekud
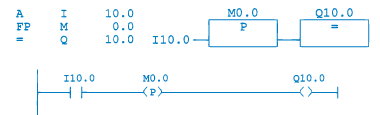 Joonis 4.14. Positiivse frondi avastamine STL, FBD ja LAD keeltes
Joonis 4.14. Positiivse frondi avastamine STL, FBD ja LAD keeltes
Langeva frondi funktsioon avastab sisendoperandi IO signaali oleku muutuse 1 → 0 (joonis 4.15). Sisendoperandi IO antud hetke signaali olekut RLOs võrreldakse tema (frondi operand EO) programmi eelmises tsüklis olnud signaaliga. Kui programmi eelmises tsüklis oli sisendoperandi IO signaal 1 ja nüüd on see 0, siis saab RLO väärtuseks 1 ning impulsioperandi IPO signaal muutub “1” ainult antud programmi tsükli jaoks. Teiste juhtumite puhul on RLO ja impulssoperandi IPO signaalid “0”. Frondi operandi EO salvestatakse programmi antud tsükli RLO olek, et seda võrrelda programmi järgmisel tsüklil sisendoperandiga IO [6]. 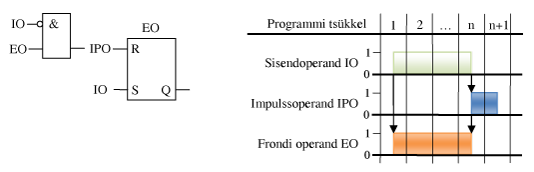
Joonis 4.15. Langeva frondi avastamine NING-lüli ja SR-trigeri abil ja operandide signaali olekud
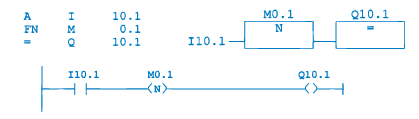 Joonis 4.16. Negatiivse frondi avastamine STL, FBD ja LAD keeltes
Joonis 4.16. Negatiivse frondi avastamine STL, FBD ja LAD keeltes
Standard IEC 61131 pakub käske R_TRIG (tõusev front) ja F_TRIG (langev front) signaali oleku muutuse avastamiseks.
Loogikatehted
Kaks muutuva väärtusega operandi (muutujat) või üks operand (muutuja) ja konstant ühendatakse omavahel loogikatehte abil. Standart IEC 61131 kasutab loogikatehete jaoks lihtsaid binaarloogika funktsioone. Need on AND, OR, XOR ja NOT.
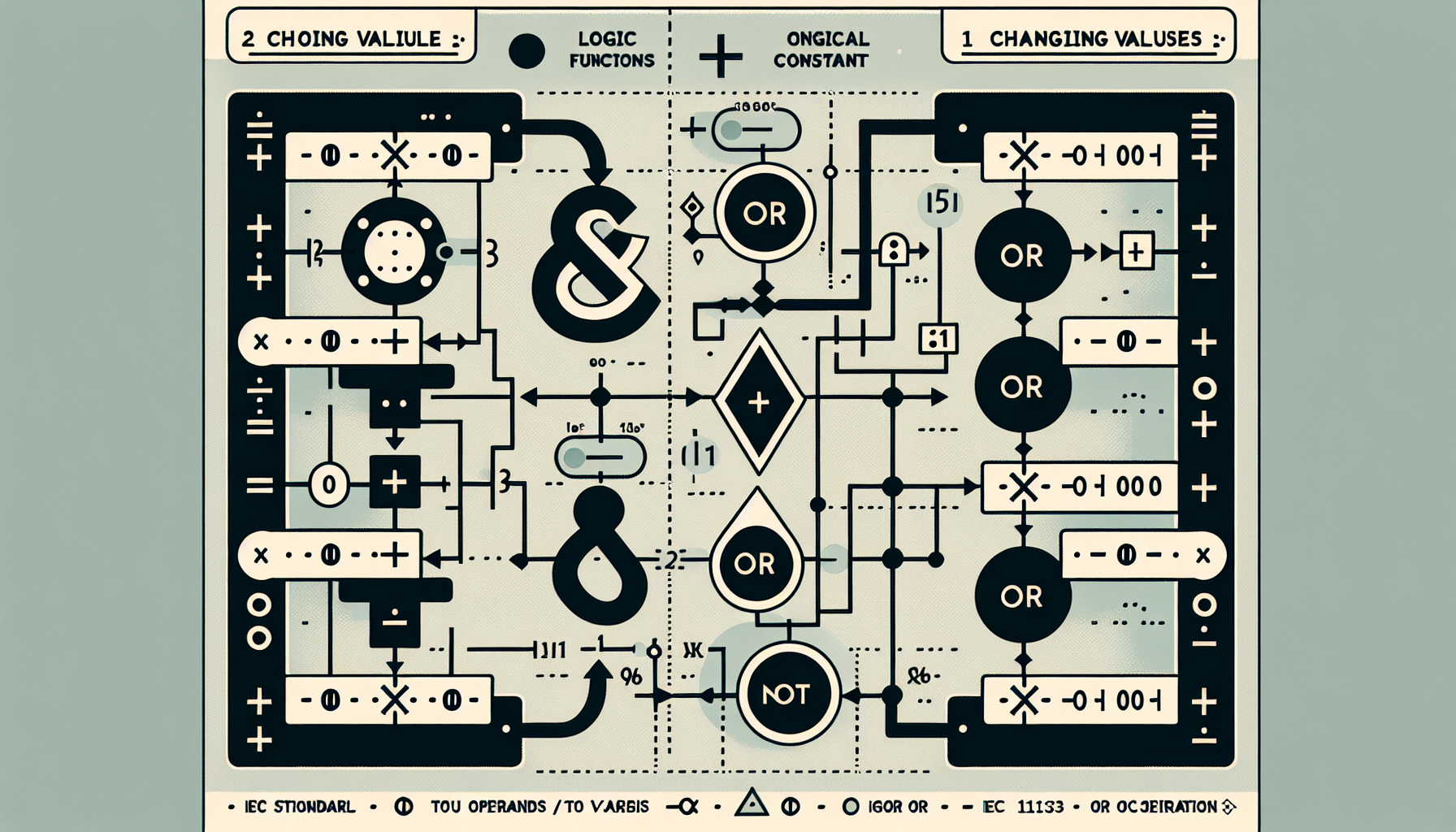
STEP 7 loogikatehted tehakse sõnadega, seejuures võrreldakse digitaalsete operandide paari teineteisega bitt biti haaval. Loogikatehetes kasutatavad operandid või konstandid peavad olema andmetüübilt sõna (WORD – 16 bitti) või topeltsõna (DWORD – 32 bitti). Tabelis 4.1 on esitatud STEP 7 loogikatehted LAD, FBD ja STL keeltes.Tabel 4.1. STEP 7 loogikatehted
| Tehte nimetus | Sõna | Topeltsõna | Kommentaar | ||
|---|---|---|---|---|---|
| STL | FBD/LAD | STL | FBD/LAD | ||
| AND | AW | WAND_W | AD | WAND_DW | Loogiline NING tehe |
| OR | OW | WOR_W | OD | WOR_DW | Loogiline VÕI tehe |
| XOR | XOW | WXOR_W | XOD | WXOR_DW | Loogiline VVÕI tehe |
| NOT | INVI | INV_I | INVD | INV_DI | Eitus |
STEP 7 kasutab loogikatehetes protsessori registreid ACCU 1 ja ACCU 2 (joonis 4.17). Need on spetsiaalsed CPU registrid, mida kasutatakse lähteandmete puhverdamiseks loogikatehete teostamise eel (vaata lisaks peatükki 5.1). Esimese operandi (IN 1) väärtus laetakse ACCU 1-le. Teise operandi (IN 2) väärtuse laadimise eel kantakse kõigepealt ACCU 1 sisu edasi ACCU 2-le ja siis teise operandi (IN 2) väärtus ACCU 1- le. Edasi seotakse ACCU 2 (operand 1) ja ACCU 1 (operand 2) sisud omavahel vastavalt teostatava loogikatehte reeglile. Loogikatehte teostamise tulemusena saadud väärtus salvestatakse ACCU 1-le, kust see antakse edasi väljundoperandile (OUT) [6].
Binaarloogika NING-tehte tulemuseks saadud (topelt)sõna mingi bitt on 1, kui sisendoperandide vastavatel kohtadel olevate bittide väärtused on 1 (tabel 4.3). Binaarloogika NING-tehtega saab varjata/peita mittevajalikke või mitteolulisi bitte (nende väärtusi) operandis/muutujas. Selleks kasutatakse maski, mille abil vajalikud või olulises kohas olevad bitid saavad signaali 1 ja teised (varjatavad) signaali 0. Maskiks võib olla muutuja või konstant. Maskeeritav operand ja mask liidetakse binaarloogika NING-tehte abil kokku, kus mittevajalike bittide väärtused varjatakse (signaal muutub 0) ja oluliste bittide väärtused ei muutu. Tabelis 4.3 maskeeritakse sisendoperandi IN 1 bitid 2 ja 3 ning sisendoperandi IN 2 kasutatakse maskina. 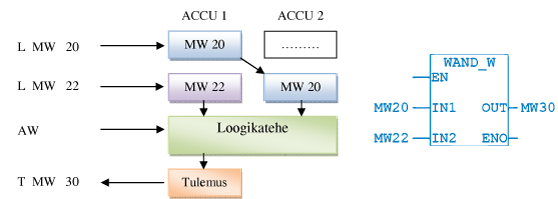
Joonis 4.17. Binaarloogika NING-tehe PLCs ja selle kujutamine STL ja FBD keeltes
Binaarloogika VÕI-tehte (topelt)sõna tulemuse mingi bitt on 1 kui sellele vastavate sisendoperandide bittidest vähemalt üks omab väärtust 1 (tabel 4.3). Antud loogikatehet kasutatakse bitimustri täiendamiseks. Binaarloogika VÕI-tehte abil lisatakse tulemuseks saadava kahendarvu ühte või mitmesse kohta signaal 1. Tabelis 4.3 oleva operandi IN 1 bittide 2 ja 3 signaalid peaksid olema 1. Selleks täiendatakse VÕI loogikatehtes bitimustrit lisades signaalid 1 operandi IN2 bittidesse 2 ja 3.
Binaarloogika VVÕI-tehte tulemuseks saadud (topelt)sõna bitt on 1 kui sellele vastavate sisendoperandide bittidest omab ainult üks bitt väärtust 1 (tabel 4.3). Antud loogikatehe võimaldab operandi bitimustris tuvastada signaali muutust ühes või mitmes biti kohas. Selleks liidetakse VVÕI-tehte abil kokku operandi vana ja uus bitimuster. Igas kohas, kus toimub signaali muutus 0 → 1 või 1 → 0, väljastab VVÕI-tehe signaali 1. Tabelist 4.3 on näha, et signaali muutus on toimunud bitis 1 (1 → 0) ja bitis 2 (0 → 1). Sisendoperand IN 1 omab vana bitimustrit ja sisendoperand IN 2 uut bitimustrit. Kui on vaja tuvastada signaali muutust 0 → 1, siis tuleb peale VVÕI-tehet teostata uue bitimustriga NING-tehe (tabel 4.2). Signaali muutuse 1 → 0 avastamiseks tuleb pärast VVÕI-tehet teostada vana bitimustriga NING-tehe (tabel 4.2).Tabel 4.2. Signaali muutuse tuvastamine 0 → 1 või 1 → 0
| Signaali muutuse tuvastamine | Käsk | Näide | Kommentaar |
|---|---|---|---|
| Vaja tuvastada ainult signaali muutusi 0 → 1 | L MW 20 L EW 10 XOW L EW 10 UW | …. 1010 …. 1100 …. 0110 …. 1100 …. 0100 | Sõna vana biti mustriga Sõna uue biti mustriga ACCU 1 on muudetud biti muster Sõna uue biti mustriga ACCU 1 on lõpptulemus |
| Vaja tuvastada ainult signaali muutusi 1 → 0 | L MW 20 L EW 10 XOW L MW 20 UW | …. 1010 …. 1100 …. 0110 …. 1010 …. 0010 | Sõna vana biti mustriga Sõna uue biti mustriga ACCU 1 on muudetud biti muster Sõna vana biti mustriga ACCU 1 on lõpptulemus |
Binaarloogika EI-tehte tulemuseks on inverteeritud väärtusega sisendoperand. Loe selle kohta peatükist Matemaatilised ja teisendusfunktsioonid → Teisendusfunktsioonid → Teisendamine väärtuse täiendamisega.
Joonisel 4.18 on esitatud STEP 7 loogikatehte näiteid. STL keeles on esitatud binaarloogika VÕI-tehe sõna tüüpi muutujatega, FBD keeles VVÕI-tehe topeltsõna tüüpi muutujatega ning LAD keeles EI-tehe topeltsõna tüüpi muutujatega. Tabel 4.3. Näiteid loogikatehete kohta
| Funktsioon | NING | VÕI | VVÕI | EI |
|---|---|---|---|---|
| Näide | IN 1: …. 1010 IN 2: …. 1100 OUT: …. 1000 | IN 1: …. 1010 IN 2: …. 1100 OUT: …. 1110 | IN 1: …. 1010 IN 2: …. 1100 OUT: …. 0110 | IN 1: …. 1010 OUT: …. 0101 |

Joonis 4.18. Loogikatehte näiteid STL, FBD ja LAD keeltes
PLC valik, ohutus ja kasutuselevõtt
PLC valimine
Rakenduse juhtimiseks valitakse PLC vajalike I/O arvu ja funktsionaalsuse alusel. Esimene oluline valik on tüübi valik: kompaktne, moodul-, kassett-, OPLC, tööstusarvuti, kaart- ja tarkvaraline PLC. Tüübivaliku otsus sõltub järgmistest kriteeriumidest [24]:
- digitaal- ja analoogsisendite ja -väljundite arvust;
- funktsiooni- ja spetsiaalsete moodulite arvust – ebatavalise rakenduse jaoks, võib vajalik olla suur arv spetsiaalseid lisamooduleid (nt servo- või sammmootori juhtimine);
- nõutud mälumaht sõltub kirjutatud programmi pikusest. Enamus PLC programmeerimise keskkondadest on võimelised välja arvutama kasutaja programmi poolt tarbitavat mälumahtu;
- programmi tsükliaeg – suured programmid või kiired protsessid vajavad lühemaid tsükliaegu (kiiremaid PLCsid). PLC programmeerimiskeskkond on võimeline välja arvutama tsükliaega. Tegelik tsükliaeg võib olla lühem, st et programmi reaalsel töötamisel jäetakse osa programmilõike vahele, kuna neid ei aktiveerita või ei täideta;
- andmeside – jada- ja võrguühendused lubavad PLCd programmeerida, ühendada teiste PLCdega (andmete vahetamiseks) ning automatiseerimisseadmetega (nt sujuvkäiviti, sagedusmuundur, SQL server, operaatorpaneel, HMI puutepaneel jne). Andmesidevajadused määratakse rakenduse (automatiseeritava protsessi või masina) nõuetega;
- tarkvara – programmeerimise ja teiste tarkvaratööriistade saadavus turul ja nende funktsioonid määravad programmeerimise ja veaotsingu lihtsuse;
- konkreetses protsessis vajamineva PLC riist- ja tarkvara maksumus. Peale PLC ja selle moodulite maksumuse võib see sisaldada tarkvara, programmeerimis- seadme, kasutusjuhendite ja mõnikord ka koolituse hinda (maksumust).
PLC mudeli valikul saab lähtuda eespool loetletud üldnõuetest, kuid tihti tuleb arvestada ka teisi tegureid. Probleemid võivad tekkida, kui samas tehases kasutatakse eri protsesside juhtimiseks erinevate tootjate PLCsid. Erinevate PLCde kasutamine esitab operaatoritele ja teenindavale personalile suuri nõudmisi. Personal peab olema pädev kasutama erinevaid PLCd ja nende programmeerimistarkvarasid, lisaks sellele tuleb suurendada tehase laos hoitavate varuosade arvu. Iga PLC ei pruugi sobida ettevõtte protsesside juhtimiseks. Tavaliselt lähtuvad ettevõtted PLC mudeli valikul protsessispetsiifilistest nõuetest, kuid PLC perekonna valik tehakse kõrgemal tasemel. Tarnija valimisel tuleb peale PLC funktsionaalsuse lähtuda ka teistest kriteeriumidest. Nendeks võivad olla toodete kättesaadavus ja tarneajad, tehniline tugi ja koolitus, hinnatase ja kogemused töös vastava tarnijaga.
PLC ohutus
Tänapäeva automatiseeritud süsteemid (protsessid ja masinad) peavad olema ohutud kasutajale ja toodangule. Igas tehnilises süsteemis võib esineda mingi rike või viga. Rikete võimalust tuleks vähendada juba automatiseeritud süsteemi projekteerimise, ehitamise ja kasutuselevõtu etappides, hiljem on raskem ja ka kulukam ilmnevaid rikkeid kõrvaldada. Automatiseeritud süsteemid ei saa kunagi täielikult rikkevabaks ja seetõttu on ohutusnõuetega vaja arvestada juba projekteerimise etapil. [5].
PLCga juhitavate süsteemide rikked tulenevad andurite sisemistest riketest, ummistunud solenoidventiilidest, juhtmete purunemisest, lühistest või maalühistest põhjustatud vigastatud kaablitest. Väike osa riketest tuleneb PLC signaalimoodulite ja CPU elektroonika riketest [5], seega tuleb PLC programm kirjutada nii, et juhtimissüsteemis ilmnevad rikked ei viiks kogu süsteemi ohtlikku olukorda. See kehtib kogu juhtimissüsteemi (mis võib sisaldada teisi juhtimistehnoloogiaid nagu hüdraulilist, pneumaatilist või mehaanilist juhtimist) korral.
Algeline ohutus on võimalik saavutada kasutades ohutusseadmeid, näiteks hädaväljalülitusseadmeid (lülitid), kaitsevõret ja/või ohutuspiirilüliteid. Keerulisematel juhtudel tuleb kasutada spetsiaalseid (dubleeritud) juhtimisseadmeid ja andmesidesüsteeme (nt PROFIsafe). Selleks pakub Siemens spetsiaalseid tõrkekindlaid PLCsid, mida tähistatakse tähega F. Sellise PLC CPUd omavad kaht osa, mis töötlevad täiesti sõltumatult programmi erinevaid osi. Üks töötleb tavalist juhtimisprogrammi ja teine ohutusega seotud programmi. Ohutusega seotud programm kirjutatakse F LAD ja F FBD keeltes, mis võrreldes tava programmeerimiskeeltega omavad vähem andmetüüpe ja piiratud arvu käske. Need keelemoodulid tuleb eraldi osta.
Automatiseeritud süsteemi projekteerimisel ja ehitamisel tuleb arvestada erinevate määrustega. Masinatootjate jaoks on tähtsateks määrusteks masinadirektiiv 2006/42/EC, elektromagnetilise ühilduvuse (EMC) direktiiv 2004/108/EC ja madalpingedirektiiv 2006/95/EC. Protsessi automatiseerimisel tuleb arvestada ka muid Euroopa ja rahvusvahelisi standardeid.
Automatiseeritud süsteemi ohutuse jaoks on olulised järgmised sätted:
- tuleb vältida ohtlikke olukordi, mis võivad vigastada inimest või masinat;
- rikked juhtimissüsteemi sisendahelates (juhtmete purunemine, lühised või maa- lühised) ei tohi põhjustada süsteemi taaskäivitumist ning takistada selle peatamist;
- pärast voolukatkestust ei tohi süsteem tahtmatult taaskäivituda;
- rikete puhul peavad hädaväljalülitusseadmed ja ohutusepiirlülitid tööle jääma. Hädaväljalülituse aktiveerumisel tuleb automatiseeritud süsteemis saavutada võimalikult kiiresti kahjutu/ohutu seisund. Hädaväljalülitusseadme lähteoleku taastumisel ei tohi süsteem automaatselt taaskäivituda (käivitamieks tuleb kasutada eraldi nuppu). Juhtimissüsteemi hädaväljalülitusahel tuleb luua PLC juhtimissüteemist eraldi, kasutades selleks nt releesid (kontaktoreid);
- kasutada tõrkekindlaid seoseid nt “Stopp” funktsiooni ja hädaväljalülituse juures. See tähendab, et täituri, anduri, lüliti jne signaal on alati 1, kui see ei ole aktiivne. Andurite ja/või nuppude aktiveerumisel, juhtme purunemisel või täituri lahtiühendamisel muutub täituri signaal 0 ja peatab süsteemi töö või tõkestab selle käivitamise;
- kasutada blokeeringuid, et vältida soovimatuid süsteemi lülitustingimusi ja tõkestada seadme liikumist üle piiride. Vastastikku toimuvad liikumised (nt vasakule ja paremale) tuleks blokeeritakse elektriskeemis ja samuti PLC programmis. Liikumisteljele tuleks lisada piirlüliteid, mis mõjutavad otse mootori toiteahelat (katkestavad voolu);
- kasutada liiasusega süsteeme. Automatiseeritava süsteemi ohtlikes kohtades tuleks kasutada rohkem kui ühte seadet (lüliti, andur, nupp jne). Nt võiks kasutada kahte ohutuspiirlülitit normaalselt avatud ja suletud kontaktidega telje ühes otsas, et jälgida selliseid rikkeid nagu juhtmete purunemist, vigast kontakti (normaalselt avatud kontakt ei sulgu või normaalselt suletud kontakt ei avane), lühist kahe juhtme vahel ning ühe lüliti riket (üks enam ei tööta);
- kasutada varjestatud kaableid, et vältida soovimatuid signaaliväärtuse muutusi (digitaalsed I/O) ja eksitava väärtusega mõõtesignaale (analoog I/O);
- kasutada häirefiltrit ja kondensaatorit võrgutoiteallika pingehäirete vältimiseks. Võrguhäire filter kaitseb ülepingete ja toitevõrgust tulevate häiresignaalide eest. Kondensaator salvestab enesesse elektrienergiat, mis tagab kontrolleri toite ka lühiajalise voolukatkestuse korral;
- vastastikuse induktsiooni pinge tuleb kõrvaldada otse lähtepunktis, st mähise juures. Kasutada selleks summutusdioodi (ainult DC puhul), kondensaatorit (AC puhul) või varistori (pinge väärtusest sõltuv takisti);
- “Start” funktsiooni võib teostada ainult siis, kui kaitsesignaalid näitavad süsteemi ohutut olekut;
- süsteemi “Stopp” funktsioon omab eesõigust süsteemi “Start” funktsiooni ees.
Automatiseeritud süsteemi kasutuselevõtmisel tuleb jälgida ka ohutusnõudeid. Kasutaja programmi muutmine süsteemi töötamise ajal on sama mis juhtme vahetamine pinge all. See võib põhjustada süsteemis ootamatu reaktsiooni, mis võib vigastada inimesi ja/või hävitada seadmeid.
Kasutuselevõtmine
PLC programmid ei ole kunagi lõplikud; neis on alati võimalik teha parandusi ja kohandada uue süsteemi joaks või vastavalt kliendi muutunud nõudmistele.
Sageli on vaja programmi muuta isegi kasutuselevõtu ajal. Siiski tuleks programm valmis saada enne tehasekatsetuste algust. Kasutuselevõtu võib jagada neljaks sammuks:
- riistvara kontroll;
- tarkvara (juhtimisprogrammi) ülekandmine kontrollerisse ja testimine;
- tarkvara optimeerimine;
- kogu süsteemi kasutuselevõtmine.
Riistvara kontroll
Iga sensor, lüliti ja nupp on ühendatud spetsiifilise sisendiga ja iga täitur vastava väljundiga. Süsteemi projekteerimise ja ehitamise ajal ei tohi juhtmeid ja aadresse segamini ajada [8]. Tuleks kontrollida ka andurite ja täiturite asukohti süsteemis, et nad oleksid kindlasti õiges kohas.
Riistvare kontrollimise käigus aktiveeritakse väljundid katserežiimis. Seejuures peavad täiturid teostama neile määratud funktsioone.
Kui süsteemis tehakse muudatusi, tuleb ka dokumentatsioon uuendada (uuendada detailide/seadmete paigutuse jooniseid, nimekirju jne).
Tarkvara ülekandmine ja testimine
Enne süsteemi kasutuselevõttu tuleb programmis olevate vigade otsimiseks kasutada kõiki PLC programmi (virtuaalseid) testimistööriistu. Selliseks tööriistaks on STEP 7-s alamtarkvara S7-PLCSIM, mis simuleerib PLC tööd (virtuaalne PLC) ja võimaldab kasutaja poolt kirjutatud programmi katsetada. Selle meetodi kohaselt laetakse programm virtuaalse PLC virtuaalsesse CPUsse. Programmi täidetakse ilma reaalse PLCta. Kasutaja peab simuleerima sisendsignaalide muutusi ja jälgima, kuidas väljundid sellele reageerivad.
Mõnede firmade PLCd võimaldavad testida programmi reaalse PLC peal. Seadme juhtimisprogramm täidetakse ilma reaalsete sisendite ja väljundite külgeühendamiseta. PLC väljundite töötlemine leiab aset ainult PLC-väljundite protsessikuvas, kusjuures see ei ole seotud PLC füüsiliste väljunditega. PLC füüsilisi I/Osid ei uuendata PLC I/Ode protsessikuva abil (vastupidi ka ei tehta), seega väljastab see võimalust kahjustada masinaid või süsteemi osasid.
Pärast seda testitakse üksikuid programmi osasid ja süsteemi funktsioneerimist: käsitsi töötamine, seadistamine, individuaalsed jälgimisprogrammid jne ning lõpuks programmi osade vastastikust koostööd põhiprogrammi (OB 1) abil.
Süsteemi saab ja tuleks kasutusele võtta samm-sammult. Kasutuselevõtu ja vigade tuvastamise oluliseks aspektiks on programmeerimissüsteemi testfunktsioonide võimalused nagu näiteks ühesammurežiim või peatuspunktide seadistamine. Eriti tähtis on ühesammurežiim, kus PLC mälus olevat programmi täidetakse rida-realt või samm- sammult, niiviisi saab tuvastada kohe programmis esinevad vead.
Tarkvara optimeerimine
Kasutaja programme saab peaaegu alati pärast esimest katsekäivitamist täiustada. Oluline on, et mistahes parandused või muudatused tehakse mitte üksnes PLC programmis, vaid võetakse arvesse ka dokumentatsioonis [8].
Kogu süsteemi kasutuselevõtmine
See toimub osaliselt juba testimise ja optimeerimise etapil. Kui PLC-programmi ja dokumentatsiooni lõplik versioon on valmis, tuleb kontrolleri kõiki funktsioone (vastavalt automatiseerimise ülesandele) uuesti sammhaaval täita. Kui kogu süsteemi kasutuselvõtmisel ei ilmnenud ühtegi riket/viga, siis on süsteem valmis kliendile üleandmiseks.’
Viited
- “Programmable Logic Controllers” by Frank D. Petruzella – Ülevaade PLC-de tööpõhimõtetest ja nende rakendustest tööstusautomaatikas.
- “PID Control System Design and Implementation Using MATLAB” by Liuping Wang – Praktiline juhend PID-regulaatorite projekteerimiseks ja rakendamiseks.
Täiturid ja ajamid
Ülevaade: Täiturid ja ajamid on seadmed, mis teostavad juhtimissüsteemi käske, mõjutades otseselt protsessi. Täiturid muudavad elektrilised signaalid mehaaniliseks liikumiseks või muuks füüsiliseks tegevuseks, samas kui ajamid pakuvad vajalikku jõudu ja liikumist. Need seadmed on otseselt seotud süsteemi tööga, tagades protsesside füüsilise juhtimise.
Tüübid ja funktsioonid:
- Elektrilised täiturid: Näiteks mootori täiturid, mis muudavad elektrisignaale mehaaniliseks pöördemomendiks ja liikumiseks.
- Pneumaatilised ja hüdraulilised täiturid: Kasutatakse suure jõu ja täpse liikumise tagamiseks, näiteks ventiilide avamiseks ja sulgemiseks hüdraulika- või pneumaatikasüsteemides.
- Servoajamid: Kasutatakse täpseks liikumise kontrollimiseks robotites ja täppismasinates.
Soovitatavad illustratsioonid:
- Erinevate täiturite pildid ja diagrammid, mis näitavad nende tööpõhimõtteid.
- Pneumaatilise ja hüdraulilise täituri tööpõhimõtte skeem, mis selgitab nende rolli tööstuslikes rakendustes.
Viited:
- “Control Systems Engineering” by Norman S. Nise – Süsteemide ja täiturite kasutamine automaatikas.
- “Electric Motors and Drives” by Austin Hughes – Praktiline juhend elektrimootorite ja ajamite toimimise ja rakenduste kohta.
Inimese ja masina vaheline liides (HMI)
Ülevaade: Inimese ja masina vaheline liides (HMI) on visuaalne liides, mis võimaldab operaatoritel jälgida ja juhtida automaatjuhtimise süsteemi. HMI-d on loodud nii, et nad kuvavad süsteemi olekut ja protsesside parameetreid arusaadavalt, võimaldades kiiret ja tõhusat sekkumist, kui see on vajalik.
Tüübid ja funktsioonid:
- Graafilised kasutajaliidesed (GUI): Kasutajaliidesed, mis kuvavad protsessi oleku graafilisel kujul, näiteks skeemide ja diagrammidena.
- Tekstipõhised liidesed: Kasutatakse lihtsamates süsteemides, kus graafikat pole vaja, kuid süsteemi seisundi jälgimine on siiski vajalik.
- Puuteekraanid: Kaasaegsed HMI-d, mis võimaldavad operaatoritel suhelda süsteemiga intuitiivselt ja kiiresti, pakkudes mugavat juurdepääsu erinevatele juhtimisfunktsioonidele.
Soovitatavad illustratsioonid:
- HMI skeem ja selle tööpõhimõte, mis näitab, kuidas operaatorid saavad jälgida ja juhtida protsesse.
- Näidised HMI ekraanivaadetest, mis näitavad protsessi parameetrite kuvamist ja juhtimisvõimalusi.
Viited:
- “Human Machine Interface Design for Process Control Applications” by Jean-Yves Fiset – Põhjalik ülevaade HMI-de kujundusest ja nende rollist protsesside juhtimisel.
- “The Essentials of Human-Machine Interface” by Patrick McBride – HMI-de põhialused ja parimad praktikad tööstusautomaatikas.
2.2. Juhtimissüsteemide tüübid
Avatud ja suletud juhtimissilmused
Ülevaade: Juhtimissilmused on aluseks igale automaatjuhtimise süsteemile. Need määratlevad, kuidas süsteem reageerib ja kohandub vastavalt sisenditele ja väljunditele. Avatud juhtimissilmused ei kasuta tagasisidet, mis tähendab, et süsteemi väljundit ei võrrelda soovitud väärtusega. Suletud juhtimissilmused seevastu kasutavad tagasisidet, et pidevalt võrrelda tegelikku väljundit soovitud väärtusega ja teha kohandusi, et saavutada stabiilne ja täpne süsteemikäitumine.
Tüübid ja funktsioonid:
- Avatud juhtimissilmus: Kasutatakse lihtsates süsteemides, kus tagasiside ei ole vajalik, näiteks ajastatud kastmissüsteemis, kus vett pumbatakse teatud aja jooksul sõltumata mulla niiskuse tasemest.
- Suletud juhtimissilmus: Kasutatakse süsteemides, kus on oluline täpsus ja stabiilsus, näiteks kütte reguleerimisel termostaadiga, kus temperatuuri pidevalt jälgitakse ja kohandatakse vastavalt soovitud seadistusele.
Soovitatavad illustratsioonid:
- Avatud ja suletud juhtimissilmuse skeemid, mis selgitavad tagasiside rolli ja erinevusi nende kahe juhtimismeetodi vahel.
- Näited praktilistest rakendustest, mis illustreerivad mõlemat tüüpi juhtimissilmuseid.
Viited:
- “Feedback Control of Dynamic Systems” by Gene F. Franklin, J. David Powell, Abbas Emami-Naeini – Sügav ülevaade juhtimissilmustest ja nende rakendustest.
- “Modern Control Engineering” by Katsuhiko Ogata – Teoreetiline ja praktiline käsitlus juhtimissüsteemidest ja nende rakendustest tööstuses.
P, PI ja PID-regulaatorid
Ülevaade: P, PI ja PID-regulaatorid on automaatjuhtimise süsteemides laialdaselt kasutatavad algoritmid, mis pakuvad täpset ja stabiilset juhtimist. Need regulaatorid kasutavad erinevaid lähenemisviise, et kohandada süsteemi väljundit vastavalt soovitud väärtusele. Proportsionaalne (P) regulaator reageerib vea suurusele, integraalregulaator (I) arvestab ajas kogunevat viga ja diferentsiaalregulaator (D) reageerib vea muutumise kiirusele. PID-regulaator ühendab kõik need kolm komponenti, pakkudes täpset ja stabiilset juhtimist.
Tüübid ja funktsioonid:
- P-regulaator: Kasutatakse süsteemides, kus kiire reageerimine on oluline, kuid võib jääda püsiv viga.
- PI-regulaator: Kombineerib proportsionaalse ja integraalse komponendi, vähendades püsivat viga ja säilitades stabiilsuse.
- PID-regulaator: Kasutatakse keerukates süsteemides, kus on oluline nii reageerimiskiirus, stabiilsus kui ka minimaalne püsiv viga.
Soovitatavad illustratsioonid:
- P, PI ja PID-regulaatorite plokkskeemid, mis näitavad nende komponentide mõju süsteemi käitumisele.
- Simulatsioonigraafikud, mis illustreerivad iga regulaatori mõju reaalsele süsteemile (nt temperatuuri kontroll).
Viited:
- “PID Control: Ziegler-Nichols Tuning Method” by Karl Johan Åström – Ülevaade PID-regulaatori seadistamisest ja optimeerimisest.
- “Control Systems Engineering” by Norman S. Nise – Süsteemide ja regulaatorite teoreetiline ja praktiline käsitlus.
Programmeeritavad loogikakontrollerid (PLC)
Ülevaade: Programmeeritavad loogikakontrollerid (PLC) on tööstuslikud arvutid, mida kasutatakse automaatjuhtimise süsteemides erinevate protsesside ja seadmete juhtimiseks. PLC-d on usaldusväärsed ja paindlikud, võimaldades luua keerulisi juhtimisloogikaid, mis vastavad tööstusprotsesside vajadustele. Need seadmed on laialdaselt kasutusel tootmisliinide, masinaehituse ja erinevate tööstusprotsesside automatiseerimisel.
Funktsioonid:
- Sisendid ja väljundid (I/O): PLC-d võtavad vastu signaale anduritelt (sisendid) ja väljastavad juhtsignaale täituritele (väljundid).
- Protsessor: PLC protsessor töötleb sisendsignaale vastavalt programmeeritud loogikale ja genereerib väljundsignaale.
- Tarkvara ja programmeerimine: PLC-d programmeeritakse tavaliselt spetsiaalsete tarkvarade abil, kasutades loogilisi skeeme, nagu järjestikune loogika või redeliloogika (ladder logic).
Soovitatavad illustratsioonid:
- PLC arhitektuuri skeem, mis näitab selle põhikomponente (sisendid, väljundid, protsessor).
- Näidised PLC programmeerimise ekraanivaadetest, mis näitavad lihtsaid ja keerulisi juhtimisloogikaid.
Viited:
- “Programmable Logic Controllers” by Frank D. Petruzella – Ülevaade PLC-de tööpõhimõtetest ja nende rakendustest tööstusautomaatikas.
- “PLC Programming Methods and Applications” by John Ridley – Praktiline käsiraamat PLC programmeerimiseks ja kasutamiseks.
2.3. Supervisory Control and Data Acquisition (SCADA) süsteemid
Ülevaade: SCADA süsteemid on keerukad juhtimis- ja järelevalvesüsteemid, mida kasutatakse laiaulatuslike tööstusprotsesside, infrastruktuuride ja seadmete jälgimiseks ja juhtimiseks. SCADA süsteemid koguvad andmeid reaalajas, võimaldades operaatoritel jälgida protsesside toimimist ja avastada kõrvalekaldeid. SCADA süsteemid võimaldavad tsentraalset juhtimist ja operatiivset teabehaldust, pakkudes olulist tuge suurte infrastruktuuride, nagu elektrivõrgud, veepuhastusjaamad ja transpordisüsteemid, toimimise tagamisel.
Funktsioonid:
- Andmete kogumine: SCADA süsteemid koguvad andmeid erinevatest allikatest, sealhulgas anduritest, kontrolleritest ja muust varustusest. Need andmed edastatakse tsentraalsesse juhtimiskeskusesse reaalajas.
- Andmete visualiseerimine ja analüüs: SCADA süsteemid pakuvad visuaalseid vahendeid, nagu graafikud ja skeemid, mis võimaldavad operaatoritel süsteemi olekut selgelt näha ja kiirelt reageerida.
- Järelevalve ja häiresüsteemid: SCADA süsteemid jälgivad pidevalt süsteemi seisundit ja annavad hoiatusi, kui esineb kõrvalekaldeid või süsteemirikkeid.
- Kaugjuhtimine: SCADA võimaldab operaatoritel juhtida protsesse ja süsteeme kaugelt, pakkudes suurt paindlikkust ja ohutust.
Soovitatavad illustratsioonid:
- SCADA süsteemi arhitektuuriskeem, mis näitab andmete kogumise, töötlemise ja visualiseerimise protsessi.
- Näited SCADA ekraanivaadetest, mis kuvavad protsessi parameetreid ja häiresignaale.
Viited:
- “SCADA: Supervisory Control and Data Acquisition” by Stuart A. Boyer – Põhjalik juhend SCADA süsteemide kujundusest ja rakendamisest.
- “Practical SCADA for Industry” by David Bailey and Edwin Wright – Praktiline käsiraamat SCADA süsteemide rakendamiseks tööstusprotsesside juhtimisel.