Sissejuhatus
PROFIBUS (Process Field Bus) tööväljaprotokoll töötati välja Siemensi, Boschi ja Klockner-Moeller poolt, et vastata nii diskreetse tootmise kui ka Euroopa standardite EN50170 ja EN50254 nõudmistele. Profibus võimaldab luua andmesidet erinevate tootjate poolt tehtud seadmete vahel ilma spetsiaalse liidesekohanduseta. Profibusi on võimalik kasutada kõrge kiirusega rakendustes ja komposiitandmevahetuses.
PROFIBUS (Process Field Bus) võrkude kasutusala
PROFIBUS (Process Field Bus) on tööstuslik kommunikatsiooniprotokoll, mida kasutatakse laialdaselt protsesside ja seadmete juhtimisel. See on standardsüsteem, mis võimaldab automatiseeritud seadmete, näiteks andurite, toimilülitite ja juhtseadmete vahel kiiret ja usaldusväärset andmevahetust. Algselt töötati see välja 1980. aastate lõpus Saksamaal, ja sellest on saanud üks juhtivaid kommunikatsiooniprotokolle tööstusautomaatikas.
Kasutusalad
- Protsessiautomaatika
- Keemiatööstus: PROFIBUS-võrkude abil juhitakse ja jälgitakse keemiliste protsesside erinevaid etappe, tagades, et kõik andmed saadakse reaalajas ja et protsessid toimivad tõrgeteta.
- Toidu- ja joogitööstus: Kasutatakse seadmete koordineerimiseks ja kontrollimiseks, nagu segamine, täitmine, pakendamine ning kvaliteedikontroll.
- Tööstusautomaatika
- Robootika: PROFIBUS-võrk ühendab roboteid ja teisi automaatseid seadmeid, võimaldades neil suhelda ja koordineerida tegevusi tootmisliinidel.
- Masinate juhtimine: Võimaldab kiiret ja usaldusväärset kommunikatsiooni masinate ja nende juhtimissüsteemide vahel, tagades efektiivse ning produktiivse töö.
- Energiatootmine ja jaotamine
- Elektrijaamad: PROFIBUS-võrku kasutatakse elektrijaamade juhtimissüsteemides, sealhulgas turbiinide, generaatorite ja jaotusseadmete kontrollimiseks.
- Taastuvenergia: Kasutatakse tuule- ja päikeseenergia süsteemides andurite ja kontrollerite ühendamiseks, et optimeerida energiatootmist ning jälgida süsteemi jõudlust.
- Vee- ja reoveepuhastus
- Veepuhastusjaamad: PROFIBUS võimaldab juhtida ja jälgida puhastussüsteeme, tagades, et kõik protsessid toimivad tõhusalt ning vastavad keskkonnanõuetele.
- Reoveepuhastus: Kasutatakse reoveepuhastusprotsesside automatiseerimiseks, sealhulgas pumbad, ventiilid ja andurid, et tagada efektiivne puhastusprotsess.
- Transport ja logistika
- Raudteesüsteemid: PROFIBUS-võrk ühendab rongide erinevaid süsteeme, sealhulgas pidurid, mootori juhtimise ja reisijate informatsioonisüsteemid.
- Ladude haldus: Kasutatakse laosüsteemide automatiseerimiseks, sealhulgas konveierilindid, tõstukid ja sorteerimissüsteemid, et suurendada tõhusust ning vähendada vigade arvu.
Tehnilised eelised
- Kiirus ja Efektiivsus: PROFIBUS-võrgud toetavad suure kiirusega andmevahetust, mis on oluline reaalajas protsesside juhtimisel.
- Töökindlus: Võrgud on loodud töökindlalt ja stabiilselt töötama ka karmides tööstuskeskkondades.
- Skaalautuvus: PROFIBUS võimaldab hõlpsat süsteemi laiendamist ja modifitseerimist, mis teeb selle sobivaks erinevatele tööstuslikele rakendustele.
- Interoperabiliteet: Tagab sujuva kommunikatsiooni erinevate tootjate seadmete vahel, mis järgivad PROFIBUS standardeid.
Järeldus
PROFIBUS on üks juhtivaid kommunikatsiooniprotokolle, mida kasutatakse mitmesugustes tööstusharudes alates protsessiautomaatikast kuni transpordi ja logistikani. Selle võime pakkuda kiiret, usaldusväärset ja skaleeritavat andmevahetust muudab selle hädavajalikuks tänapäevastes tööstusautomaatika süsteemides.
Viited ja kasulikud lingid
- PI International
- Siemens – PROFIBUS Overview
- Endress+Hauser – PROFIBUS in the Process Industry
- Phoenix Contact – Understanding PROFIBUS
Need viited ja lingid pakuvad põhjalikku teavet PROFIBUS-võrkude kohta ning aitavad sügavamalt mõista nende kasutusala ja eeliseid erinevates tööstusharudes.
1. Protokolli kirjeldus
See on sobiv ka erinevate automatiseerimisülesannete lahendamiseks nii töövälja seadmete tasandil kui ka kõrgematel hierarhiatasanditel olevatel seadmetel. Profibusi eristatakse jada tööväljasüsteemide tehniliste spetsifikatsioonide tõttu, mis võimaldavad ühendada jagatud intelligentsusega digitaalseid programmeeritavaid kontrollereid ühisesse võrku. Võrgutopoloogia tingimustelt on Profibus mitmik-ülemseadmetega süsteem, mis võimaldab mitmete automatiseeritud süsteemide ja nende hajutatud perifeeriate tegutsemist samal magistraalliinil.
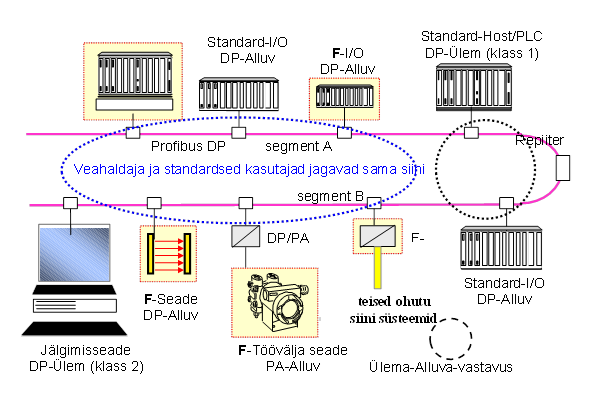
See kommunikatsioonitehnoloogia hõlmab kolme põhitüüpi protokolle: FMS, DP ja PA (pilt 5.1).
PROFIBUS-FMS (Fieldbus Message Specification, tööväljasiini sõnumi spetsifikatsioon) on olnud kasutusel alates 1990. aastast. See kavandati kõrgema hierarhiatasandi kommunikatsiooni jaoks ega ole seega sobilik kommunikatsioonivahend töövälja tasandil.
PROFIBUS-DP (Decentral Periphery) (1992) arendati andmevahetuseks programmeeritavate kontrollerite ja heterogeensete objektidega ühendatud seadmete vahel. See võimaldab andmevahetust kiirusega 12 Mbit/s. Kommunikatsioonimeetodiks on kas ülem/alluv või võrdõiguslik ligipääs. Füüsilisel tasandil on ülekandemeediumiks keerutatud juhtmepaar. Maksimaalselt saab ühendada Profibus DP võrku 126 sõlme (seadet) aadressidega 0 kuni 125. Selle tüüpilisteks rakendusaladeks on protsessihaldus ja tööstuslik automatiseerimine.
PROFIBUS-PA (Process Automation) (1997) on kavandatud andmevahetuseks tööväljatasandi süsteemide (kontrollerite, sensorite ja ajurite haldamise süsteemide) vahel konventsionaalses või Eks-tsoonis (kõrgendatud turvatsoonis). See protokoll vastab IEC 61158-2 rahvusvahelise standardi nõuetele.
Profibus PA on tunnustelt sarnane FOUNDATION Fieldbus’iga. Sellest hoolimata on Profibus PA puhul andmevahetuse kiirus umbes 30;Kbit/s, magistraalliin on kas ülem/alluv või võrdõigusliku ligipääsutüübiga ja maksimaalne sõlmede arv on üle 250 ühes võrgus.
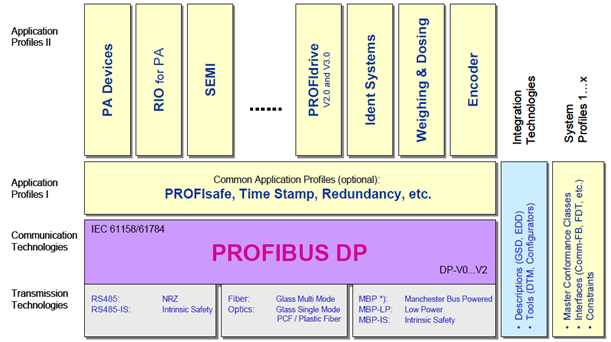
Pilt 5.1. FMS, DP ja PA protokollid [64]
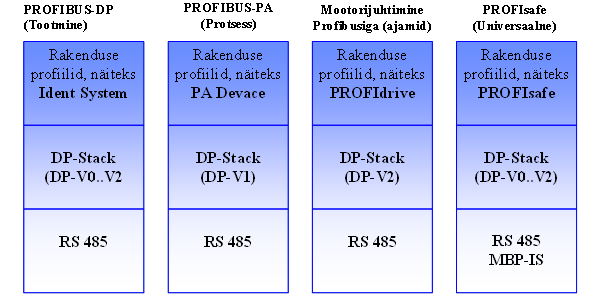
Pilt 5.2 FMS, DP ja PA protokollide tasandid [64]
2. PROFIBUS-DP funktsioneerimine
DP-liide tähistab „detsentraliseeritud perifeeriat“ (decentralized periphery), mis tähendab et hajutatud sisend/väljundseadmed on ühendatud keskse kontrolleriga kiire jadaühenduse kaudu.
See võrk baseerub universaalsetel rahvusvahelistel standarditel ja vastab avatud süsteemi (Open System Interconnection, OSI) mudelile, milles igal kommunikatsioonikihil on oma täpselt määratletud ülesanne (pilt 5.3). Selle mudeli esimene kiht defineerib kommunikatsiooni füüsilised tunnused. Teine kiht on andmelülikiht, mis defineerib ligipääsu ülekandemeediumile. Seitsmes kiht on rakenduskiht ja defineerib kasutaja funktsioonid. Profibus võrk kasutab ainult OSI mudeli kihte 1, 2 ja 7. Kihte kolm kuni kuus ei kasutata.
| Saatja | Vastuvõtja | Kihi nimetus ja funktsioon | ||
| 7 | 7 | Rakenduskiht | ||
| 6 | 6 | Esitluskiht | ||
| 5 | 5 | Seansikiht | ||
| 4 | 4 | Transpordikiht | ||
| 3 | 3 | Võrgukiht | ||
| 2 | 2 | Kanalikiht | ||
| 1 | 1 | Füüsiline kiht | ||
| Saatemeedium | ||||
Pilt 5.3.
Profibus süsteem kasutab Profibus ülemseadet, mis teostab mööda RS 485 magistraalliini (pilt 5.5) hajutatud alluvseadmete pollimist (pilt 5.4).
Alluvseadmed (sensorid, ajurid, käitusmehhanism või teised mõõteseadmed) moodustavad võrgus niinimetatud „passiivse jaama“, kuna neil ei ole autoriseeritud ligipääsu võrgule ja need ainult kinnitavad vastuvõetud sõnumeid või saadavad vastussõnumi ülemseadmelt saadud päringule. Siin tuleb öelda, et kõik alluvseadmed on võrdse prioriteediga ja kommunikatsiooni juhib ülemseade.
Ülemseade (Profibus ülem) on võrgus aktiivne jaam. Profibus’i spetsifikatsioon eristab kahte tüüpi ülemseadmeid. 1. ülemseade tüüp säilitab normaalset sidet ja andmevahetust sellega seotud alluvseadmetega (pilt 5.6). 2. ülemseade tüüp on spetsiaalne seade, mida kasutatakse peamiselt tarbijarakenduste üleslaadimiseks alluvseadmetesse diagnostika eesmärgil. Mõned ülemseadmed on kahe eelmise ülemseadme tüübi kombinatsioon, mis võimaldab neil täita mõlema ülemseadme funktsioone. Tavaliselt ei ole Profibus tööväljavõrgus ülemseadmete vaheline kommunikatsioon lubatud, välja arvatud kui ülemsüsteem annab teisele ülemseadmele ligipääsuloa tema alluvuses olevatele alamseadmetele.
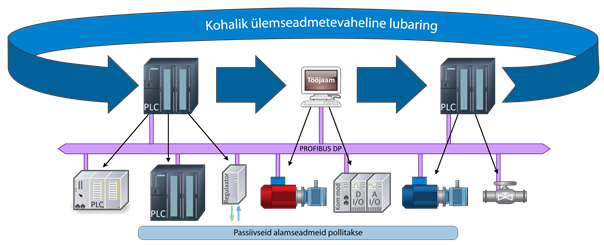
Pilt 5.4. Profibus [64]
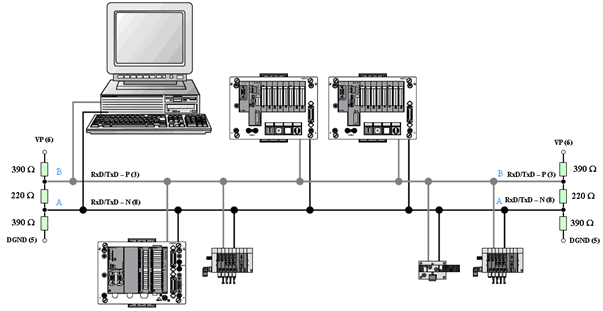
Pilt . 5.5 PROFIBUSi füüsiline kiht (RS 485)
Lubaringvõrgu (token ring) seadistus on võimalik ainult füüsiliselt lingitud seadmete vahel (võrgukaadri siseselt). Ülemseadmete (master-to-master) vaheline kommunikatsioon kahe võrgu vahel ühe-ülema-süsteemiga (pilt 5.7) on võimalik üle DP_DP-lüüsi. Ülemseade võib pöörduda individuaalse alluvseadme poole; viia läbi multiedastust pöördudes alluvseadmete grupi poole või teostada leviedastust, saates sõnumi kõigile alluvseadmetele. Alluvseade vastab kõigile temale otsesuunatud sõnumitele, kuid ei vasta multi- ja leviedastussõnumitele. Grupisõnumeid (levi- ja multiedastus) kasutatakse Profibus võrgus globaalseks juhtimiseks aadressiga 127 ja alluvseadmete sihtgrupi grupi numbriga.
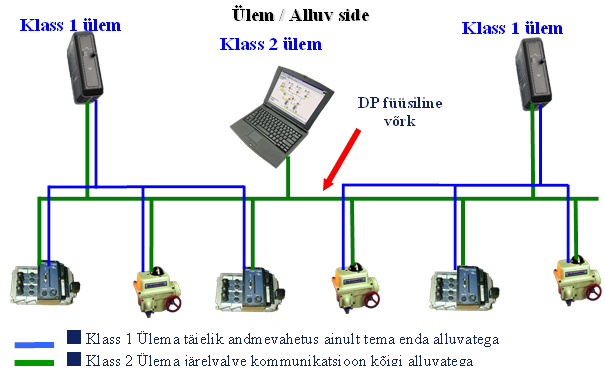
Pilt 5.6 Ülemseadmete (master-to-master) vaheline kommunikatsioon [64]
Pilt 5.7. Ülemseadmete (master-to-master) vaheline kommunikatsioon
Sisend/väljundandmete pikkus, mis kantakse alluvseadmelt ülemseadmele, on ettemääratud alluvseadme andmebaasis või GSD failis. Kõikide võrku ühendatud seadmete GSD failid on salvestatud ülemseadmes tüüp 2. parameetrikirjena, mis sisaldab andmeid konfiguratsiooni, parameetrite aadressi jaotusnimekirja ja kõigi ühendatud jaamade võrguparameetrite kohta. Tööväljavõrgu parameetrikirje laaditakse ülemseadmesse riistvara konfigureerimise faasis.
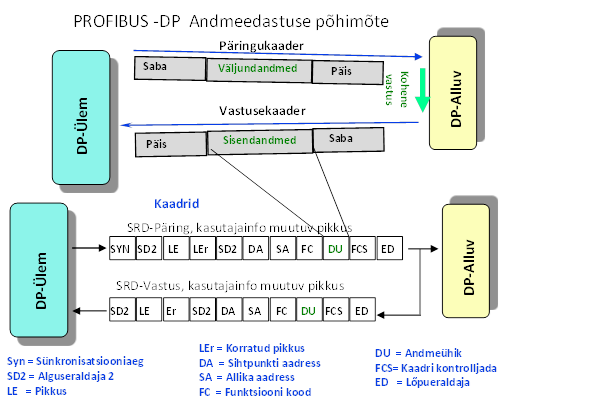
Kaadri formaat [64]
LE: Võrguandmete pikkus + DA, SA, FC, DSAP, SSAP
LE: Korduv pikkus
DA: Sihtaadress
SA: Lähteaadress
FC: Funktsioonikood (FC = 13, signaalide diagnostika andmed)
DSAP: Sihtpunkti teenuse ligipääsu punkt
SSAP: Lähtepunkti teenuse ligipääsu punkt
FCS: Kaadri kontrollsagedus
ED: Lõpueraldaja
Pilt 5.8. PROFIBUS – DP Andmeedastuse
Käivitumise ajal kommunikeerub ülemseade iga temaga seotud alluvseadmega ja aktiveerib tsüklilise andmehulga. Selles punktis on igal alluvseadmel unikaalne aadress vahemikus 0 – 125. Dünaamilise adresseerimisega seadmed (ehk aadress 126 varustamise sisselülitamisel) ootavad käsku „Määra alluva aadress“ (Set Slave Address) ülemseadmelt tüüp 2. enne parameetrite omistamist.
Kommunikatsiooniprotokoll ja selle kaader on kirjeldatud piltidel 5.8 ja 5.9.
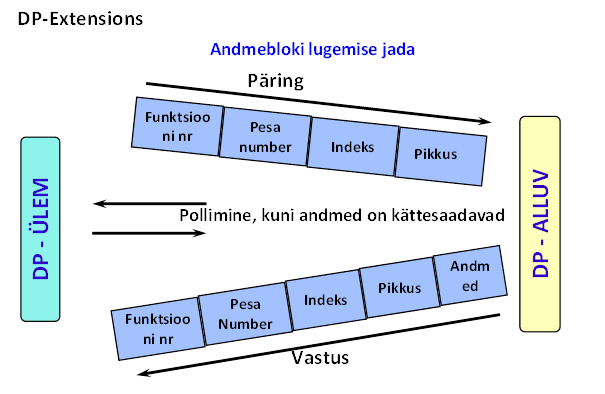
Pilt 5.9 Andmeloki lugemise jada [64]
3. Siini ajastamine
Võrgus kasutatakse vastava ülemseadme poolt läbiviidavat pollimist. Reageerimisaeg (aeg, mis kulub alluvseadmel ülemseadmele vastamiseks) on konstantne (pilt 5.10) isegi juhul, kui kasutatakse ülemseadet tüüp 2 alluvseadme diagnoosimiseks selle kommunikatsioonis ülemseadmega tüüp 1. Kommunikatsiooni vahele jäävat aega kasutatakse diagnostika eesmärkidel.
Biti-aeg (Tbit) on ajahulk, mis on vajalik ühe biti informatsiooni ülekandmiseks vastavalt siini kiirusele.
Sünkroniseerimisaeg (TSYN)on miinimumaeg, mille jooksul tööjaam peab jääma jõudeolekusse, enne kui muutub kättesaadavaks järgmisele päringule. Profibus DP puhul on see aeg 33;Тbit.
Alluvseadme reageerimisaeg (TSDR) on aeg, mille jooksul alluvseade peab andma ülemseadme päringule vastuse. Minimaalne väärtus (minTSDR) määratakse alluvseadme initsialiseerimise käigus parameetri määramise käsu abil. Maksimaalväärtus (maxTSDR) sõltub andmevahetuskiirusest ja on vastavalt andmevahetuskiirustele määratud seadme GSD failis. Profibus DP puhul on vastavate aegade väärtused järgmised: min T SDR = 11Tbit ja max T SDR = 256Tbit .
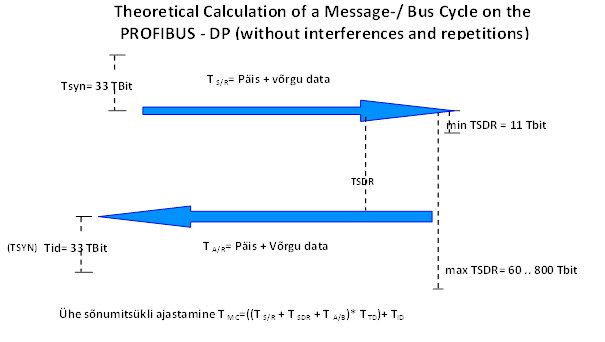
Pilt 5.10. PROFIBUS – DP andmeedastus