AUTOMAATJUHTIMISE KOMPONENDID JA TÜÜBID II OSA
TÄITURID
TÄITURMEHHANISMIDE OLEMUS
- Täitur on juhitav mehhaaniline seade toote valmistustöö teostamiseks. Täituris toimub rakendusevälise allika elektrilise, hüdraulilise või pneumaatilise energia muundamine ja edastamine valmistustööks kasutatava masina mehhaanilise liikumise energiaks (füüsikaliseks tööks), mille tulemusena võib muutuda valmiva toote ja valmistusseadmete sisu või vorm.
- Täitur on juhitav mehhaaniline seade toote valmistustöö teostamiseks.
Täituris toimub rakendusega seotud energiaallika elektrilise, hüdraulilise või pneumaatilise energia muundamine ja edastamine toote ja valmistuseks kasutatava töömasina mehhaanilise liikumise energiaks (füüsiliseks tööks).
TÄITURMEHHANISMIDE KLASSIFIKATSIOON
Täitureid liigitatakse energiaallikast edastatava energia liigi järgi (Joonis 1.1)
- Elektrilised,
- Pneumaatilised,
- Hüdraulilised,
- Mehhaanilised.
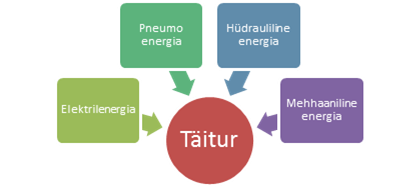
Joonis 1.1 Täiturite liigitus energiaallikast edastatava energia liigi järgi
Täitureid liigitatakse ressurssi (objekti)suubuva energia liigi järgi (Joonis 1.2)
- Elektrilised,
- Pneumaatilised,
- Hüdraulilised,
- Mehhaanilised.
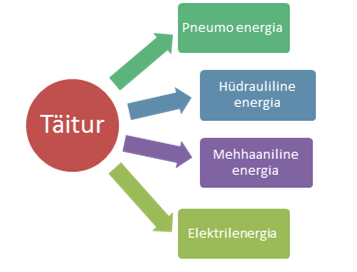
Joonis 1.2 Täiturite liigitus ressurssi (objekti) suubuva energia liigi järgi
Täitureid liigitatakse nende sisendisse edastatava energialiigi ja sees toimunud muunduse tulemusenavahetult väljundist töömasinaase edastatava energialiigi järgi (Joonis 1.3)
- elektro-mehhaanilisteks,
- elektro-pneumaatilisteks,
- elektro-hüdraulilisteks,
- pneumo-mehhaanilisteks,
- pieso-elektrilisteks,
- elektrilisteks,
- jne
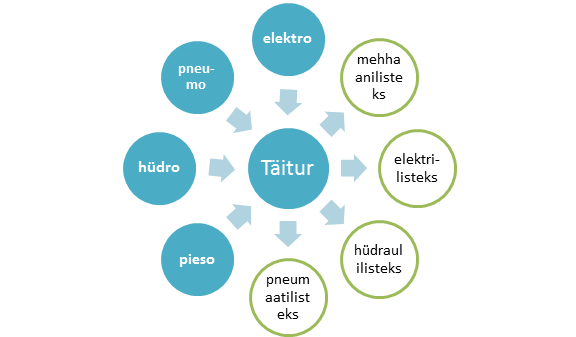
Joonis 1.3 Täiturite liigitus sisendisse edastatava energialiigi ja sees toimunud muunduse tulemusena vahetult väljundist töömasinaase edastatava energialiigi järgi
Täituri väljundis avalduva ja töömasina sisendisse suunatud mehhaanilise liikumise vormi (geomeetrilise liikumise kuju) järgi
- pöörleva liikumise täiturid;
- lineaarse liikumise täiturid;
- kontuurliikumise täiturid.
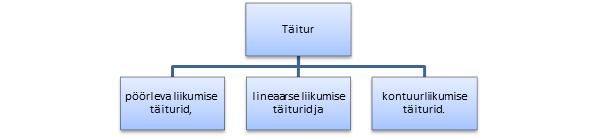
Joonis 1.4 Täiturite liigitus väljundis avalduva ja töömasina sisendisse suunatud mehhaanilise liikumise vormi (geomeetrilise liikumise kuju) järgi
Toote valmistamiseks kasutatava rakenduse töömasinas vajaliku mehhaanilise liikumise saamiseks (mehhaanilise energia saamiseks) kasutatakse väga erinevaid täitureid, näiteks:
- elektriajamid;
- juhitavad pneumosilindrid;
- hüdrosilindrid;
- kinemaatilised vardad.

Joonis 1.5 Täiturite liigitus ajami tüübi järgi
Elektro-mehhaanilised täiturid on sarnased mehhaanilistega. Nendes on mehhaaniline juhthoob asendatud elektrimootoriga. Lineaarse liikumise tekitamiseks saab kasutada erinevaid elektrimootoreid ja nendega seotud kinemaatilisi paare. Pöörleva mootori liikumine muundatakse täituri väljundis sirgjooneliseks näiteks kuulkruvipaari ja juhikute abil. Täiturivariandi valik sõltub loodava rakenduse projekteerimise tehnilistest nõuetest.
TÄITURMEHHANISMIDE VALIKUKRITEERIUMID
Täiturmehhanismide valik on tavaliselt väga keeruline ja vastutusrikas töö, sest täiturid mõjutavad dünaamiliselt terviksüsteemi. Lisaks sellele määrab täituri valik kogu süsteemi toite (alalisvool, vahelduvvool vm) ning ülekandemehhanismi. Mõnikord, kui on võimalik saavutada soovitud liikumine otse süsteemi integreerimisega, võib ülekandemehhanismi ka ära jätta. Näiteks kui kasutada sirgjoonelise liikumise tekitamiseks pöörleva mootori ja vajaliku ülekandemehhanismi asemel lineaarmootorit.
Täituri valikul peab projekteerija läbi mõtlema järgmised parameetrid:
- Võimsus püsirežiimil (continuous power output) – Maksimaalne jõud/ moment, mida täitur saaks arendada püsivalt ilma, et üle kuumeneks.
- Töövahemik (Range of motion) – sirgjoonelise või pöörleva liikumise vahemik.
- Diskreetsus (Resolution) – arendatava jõu/ momendi väikseim samm.
- Täpsus (Accuracy) – sisendi ja väljundi muutumatu suhe.
- Maksimaalne jõud / moment (Peak force / torque) – täituri poolt suurim arendatav jõud / moment.
- Soojuse hajutamine (Heat dissipation) – suurim soojuse hajutamise võimsus püsirežiimil.
- Kiiruse karakteristik (Speed characteristics) – Jõu / momendi ja kiiruse tunnusjoon.
- Tühijooksukiirus (No load speed) – töökiirus koormusvabas olekus.
- Sagedusvahemik (Frequency response) – Sageduse vahemik, milles väljund reageerib sisendile korralikult. Kasutatav sirgjooneliselt liikuvatel täituritel.
- Toide (Supply) – toite tüüp (elektrivool, suruõhk jm) , faaside arv, pinge, vool, sagedus.
Aga lisaks mainitud kriteeriumidele on määrava tähtsusega ülekandemehhanismi valik. Näiteks kui valitakse ülekandemehhanismiks hammasrattaülekanne, võib lõtku tekkimine mõjutada täituri täpsust. Sama kehtib näiteks ka rihmülekande puhul, kui rihm peaks hakkama libisema.
TÄITURID – ELEKTROMEHAANILISED TÄITURID
Elektriajami mõiste
Elektriajam (Electrical drive) on mitmesuguste töömasinate või abimehhanismide käitamiseks ettenähtud elektromehaaniline süsteem, mis koosneb elektrimootorist, jõuülekandest, toitemuundurist ja juhtseadmetest. Elektriajami põhifunktsiooniks on liikumise juhtimine (motion control) Tüüpilise elektriajami üldistatud plokkskeem on näidatud Joonis 2.1. 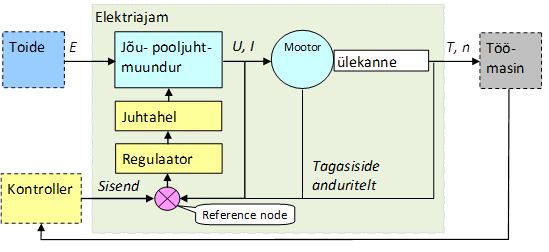 Joonis 2.1. Elektriajami struktuur
Joonis 2.1. Elektriajami struktuur
Joonise ülemine pool kujutab elektriajami jõuahelat, alumine pool juhtimissüsteemi. Jõupooljuhtmuundur, mida toidetakse ühe- või kolmefaasilisest kindla sageduse ja amplituudiga vahelduvvooluvõrgust, on ette nähtud elektrimasina (mootori) juhtimiseks. Elektrimootor juhib omakorda töömasina kiirust, momenti ja asendit. Kõik seadmed on varustatud anduritega, mis edastavad regulaatorile infot süsteemi oleku kohta. Regulaator võrdleb omavahel anduritelt saadud väärtusi sisendsignaalidega ning juhib sellele vastavalt jõupooljuhtmuundurit. Paljudes üldotstarbelistes rakendustes, nt ventilaatorid ja pumbad, kasutatakse elektriajamite kiiruse ja momendi juhtimiseks avatud juhtimissüsteemi (ilma tagasisideta anduritelt).
Elektriajamite peamisteks rakendusaladeks on tööstus, energeetika ja elektertransport, kuid nad leiavad kasutust ka kodumajapidamistes nt külmutites (kompressorid), ventilaatorites, pesumasinates, segistites (mikserid). Tänapäeval tarbitakse umbes 60% toodetud elektrienergiast elektriajamite poolt.
Et paremini aru saada elektril töötavatest täiturmehhanismidest käsitletakse esialgu lihtsamaid elektrotehnika aluseid ning seejärel kirjeldatakse kolme tihti kasutatavate elektriliste täiturite (diood, transistor ja türistor) tööpõhimõtet.
Elektrienergia muundamine mehaaniliseks energiaks.
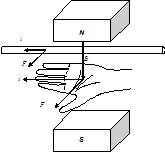
Elektrienergiat saab väga hõlpsasti muundada mehaaniliseks energiaks, soojuseks ja valguseks. Elektromehaaniline energiamuundusprotsess, mis leiab aset elektrimootori staatori ja rootorivahelises õhupilus, põhineb elektromagnetilise induktsiooni nähtusel, mille korral indutseeritakse muutuva magnetvälja toimel juhtmesse elektromotoorjõud. Muutuv magnetväli tekitatakse kas a) juhtme liikumisel paigalseisvas magnetväljas, b) magnetvälja liikumisel paigalseisva juhtme suhtes, c) voolutugevuse ja magnetvoo tiheduse muutumisel ajas. Elektromagnetilise induktsiooni nähtust selgitab Joonis 2.2,b. Magneti põhjapooluse (N) ja lõunapooluse (S) vahel on magnetväli.
a
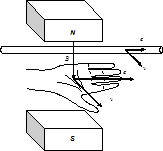
bJoonis 2.2. Elektromagnetilise induktsiooni nähtus. a – jõu tekkimine; b – elektromotoorjõu tekkimine
Lisaks sellele ümbritseb magnetväli ka elektrivooluga juhet, nagu on näidatud Joonis 2.3,a. Tugevama magnetvälja saamiseks mähitakse juhe ümber südamiku ning saadakse induktiivpool, milles iga juhtmekeeru magnetväljad summeeruvad. Induktiivpooli magnetväli on illustreeritud Joonis 2.3,b.

a
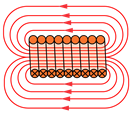
bJoonis 2.3. Juhet (a) ja solenoidi (b) ümbritsev magnetväli
Indutseeritud elektromotoorjõud on seda suurem, mida suurem on magnetvoo tihedus B ja juhtme liikumise kiirus v magnetväljas.

E on indutseeritud elektromotoorjõud voltides (V), B on magnetvoo tihedus ehk induktsioon teslades (T), l on magnetväljas liikuva juhtme pikkus meetrites (m), v on juhtme liikumiskiirus (m/s) ja a on juhtme liikumissuuna ja magnetvälja jõujoonte vaheline nurk.
Kui indutseeritud elektromotoorjõuga juhe moodustab suletud elektriahela, siis tekib suletud ahelas elektrivool i, mis on arvutatav Ohmi seaduse järgi i = E / R. Indutseeritud elektrivool, mida ümbritseb magnetväli, tekitab välise magnetväljaga vastasmõjul omakorda jõu (F), mis sõltub juhtme pikkusest (l), magnetvoo tihedusest (B) ning voolutugevusest (I). Jõu tekkimine on näidatud Joonis 2.2,a.![]()
Jõud põhjustab juhtme korral selle väändumist, mootori korral aga rootori pöörlemist. Käsitletud nähtused on reverseeritavad. Kui liigutada magnetväljas asuvat juhet mõne välise jõu toimel, siis indutseeritakse juhtmes elektromotoorjõud, mida saab kasutada voolu tekitamiseks suletud elektriahelas. Sellisel juhul on tegemist mehaanilise energia muundamisega elektrienergiaks (elektrienergia generaator). Kui aga juhtida läbi magnetväljas asuva juhtme elektrivool, siis liigub juhe mõjuva jõu suunas. Sellisel juhul on tegemist elektrienergia muundamisega mehaaniliseks (elektrimootor).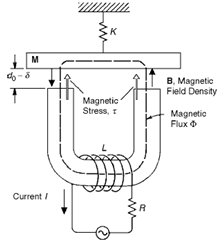 Joonis 2.4. Solenoid
Joonis 2.4. Solenoid
Vaatleme nüüd jõu tekkimist solenoidi juhtimisel alalisvooluga. Joonis 2.4 on kujutatud elektromagnet, kus U- kujulisele ferromagnetilisele südamikule on keritud mähis. Südamiku otste kohal asub ferromagnetilisest materjalist plaat, mis on vedruga ühendatud jäiga keha külge. Igat elektrivooluga juhti ümbritseb magnetväli! Kui lasta mähisest läbi elektrivool, tekkib südamikus magnetvoog, mis läbi õhupilu levib ka plaati. See aga kutsub esile magnetilise plaadi tõmbumist südamiku otste vastu. Kui nüüd elektriahel katkestada, siis kaob ka tõmbejõudu põhjustanud magnetvoog ning vedru tõmbab plaadi endisesse asendisse tagasi.
Elektrimootorite ehitus
Elektrimootorid on elektromehaanilised täiturmehhanismid, mis muundavad elektrienergiat mehaaniliseks energiaks, et panna sellega liikuma töömasinat. Elektrimootorid on tänapäeval kõige levinumad elektromehaanilised täiturmehhanismid.
Elektrimootorid koosnevad paigalseisvast staatorist ja pöörlevast rootorist. Staatoris tekitatakse pöörlev magnetväli, mis on vajalik rootori pöörlema panemiseks. Rootor pöörleb laagritele toetuval võllil, mille külge on omakorda ühendatud mehhanism. Staatori ja rootori vahel eksisteerib õhupilu, mille kaudu toimub magnetvälja penetratsioon staatorist rootorisse. Elektrimootori ehitust iseloomustab Joonis 2.5
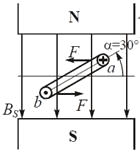
Mootori pöörlemiseks on vajalik tekitada pöördemoment. Pöördemomendi tekitamiseks on vaja vooluga juhti ja magnetvälja. Kui asetada magnetvälja raam ning lasta sellest läbi elektrivool (vt. Joonis 2.5, a), siis mõjub raamile jõud F, mis paneb raami pöörlema ümber laagritele asetatud telje (vt. Joonis 2.5, b). Pöördemomendiks nimetatakse jõu F ning jõuõla D korrutist ning arvutatakse

a
bJoonis 2.5. Pöördemomendi tekkimine alalisvoolumootoris
Elektrimootoreid võib sõltuvalt toitepinge tüübist jagada kolmeks grupiks:
- alalisvoolumootorid,
- vahelduvvoolumootorid,
- impulsstoitega mootorid.
Alalisvoolumootorid
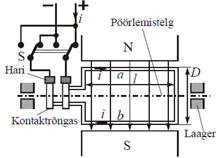
Alalisvoolumootorid (direct current motors, dc motors) koosnevad õhupiluga üksteisest eraldatud staatorist ja rootorist. Staatoril paiknevad magnetvälja poolused, milles tekitatakse magnetväli. Pöörlevat osa nimetatakse ankruks, mis koosneb mitmetest mähistest. Alalisvoolumootorites kasutatakse magnetvälja tekitamiseks staatoril paiknevat ergutusmähist või püsimagneteid. Kontaktrõngaste ja harjakeste abil juhitakse pöörlevasse raami alalisvool (vt. Joonis 2.5). Et rootor pöörleks püsivalt ühes suunas, tuleb ankruvoolu suunda iga poolperioodi tagant reverseerida. Ankruvoolu suuna muutmiseks kasutatakse alalisvoolumootorites mehaanilist või pooljuhtidega töötavat kommutaatorit.
Sõltuvalt ergutusmähise asukohast võivad alalisvoolumootorid olla kas a) võõrergutusega, kus ergutusmähist toidetakse eraldi toiteahelast, b) jadaergutusega, kus ergutusmähis on ühendatud jadamisi ankruga, c) rööpergutusega, kus ergutusmähis on ühendatud paralleelselt ankruga, või siis kombineeritult jada -ja rööpergutusega. Lisaks sellele kasutatakse kas püsimagnetergutust, mille puhul staatoril paiknevate püsimagnetitega tekitatakse ajas muutumatu magnetväli [21].
Alalisvoolumootorite stabiilsel režiimil kehtib võrrand

kus U on mootori klemmidele rakendatud toitepinge, E on ankrus tekitatud vastu-elektromotoorjõud ning IaRa on pingelang ankrumähistes. Alalisvoolumootoris kehtib kiiruse n, magnetvoo Φ ja rakendatud pinge U võrdeline seos.
pöördemomendi M, elektrivoolu I ja magnetvoo Φ vahel kehtib

Siit järeldub, et mootori pöörlemiskiirust saab tõsta pinge suurendamisega või magnetvoo vähendamisega (ergutusmähise toitepinge vähendamisega). Pöördemomenti saab suurendada kas ankruvoolu või magnetvoo suurendamisega. Siit järeldub, et magnetvoo tugevuse reguleerimine mõjutab korraga kiirust ja momenti pöördvõrdeliselt. Alalisvoolumootorite käivitamine toimub käivitusvoolu piiramiseks läbi ankruga jadamisi ühendatud takisti. Mootori kiiruse kasvades tuleb käivitustakisti väärtust vähendada.
Nad olid varem laialdaselt kasutusel reguleeritava kiirusega ajamitena. Vaatamata heale kasutegurile, mis on tavaliselt üle 90 %, kasutatakse neid tänapäeval järjest harvemini, kuna mikroprotsessortehnika ja jõuelektroonika areng võimaldab palju efektiivsemalt juhtida vahelduvvoolumootoreid, mis lisaks heale juhitavusele vajavad vähem hooldust ning on odavamad. Lisaks sellele pole alalisvoolumootorid kasutatavad keemiliselt agressiivses ja plahvatusohtlikus keskkonnas, mõnedes kohtades lausa keelatud. Kui on kasutatud harjadega mehaanilist kommutaatorit, on sädelemine nende vahel täiskoormusel vältimatu (2).
Vahelduvvoolumootorid
Vahelduvvoolumootorid jagunevad omakorda veel ühe- ja kolmefaasilisteks mootoriteks. Ühefaasilisi mootoreid kasutatakse laialdaselt tööriistades ja kodustes majapidamistes. Kolmefaasilised vahelduvvoolumootorid on rohkem levinud võimsates tööstuslikes seadmetes. Ühefaasiliste mootorite käivitamiseks tuleb kasutada pöörleva välja tekitamiseks käivitusahelat. Käesolevas konspektis keskendutakse kolmefaasilistele mootoritele.
Asünkroonmootor on madala hinna ja lihtsa ehituse pärast tööstuses kõige enam kasutatav mootor, milles staatoril tekkiv pöörlev magnetväli paneb rootori pöörlema. Asünkroonmootori tööpõhimõte, juhtimine ja kasutamine on käesoleva konspekti põhipunktideks.
Sünkroonmootori (samuti ka asünkroonmasina) staatorimähis tekitab pöörleva magnetvälja. Erinevalt asünkroonmootorist tekitatakse aga sünkroonmootori rootoris elektromagnet- või püsimagnetergutusega veel teine magnetvoog (ergutusvoog), mis magnetahela kaudu aheldub staatorimähise magnetvooga. Selle tulemusena haarab staatori pöörlev magnetväli rootori endaga kaasa (s.t staatorivälja N poolused tõmbuvad rootori S poolustega ja vastupidi) ning rootor hakkab pöörlema staatorivälja sünkroonkiirusel. Rootori ergutamiseks elektromagnetite abil tuleb ergutusvool juhtida pöörlevasse rootorisse läbi rootoril asuvate kontaktrõngaste. Püsimagnetite kasutamisel sellist vajadust pole [21].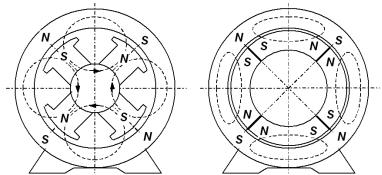 Joonis 2.6. Sünkroonmootori ehitus, väljepoolustega (vasakul) ja peitepoolustega (paremal) [ [21]].
Joonis 2.6. Sünkroonmootori ehitus, väljepoolustega (vasakul) ja peitepoolustega (paremal) [ [21]].
Sünkroonmootor arendab momenti ainult sünkroontalitluses. Seepärast on omaette probleemiks sünkroonmootori käivitamine otse võrkulülituse puhul, milleks kasutatakse asünkroonkäivitusmähist. Sünkroonmasina kiiruse reguleerimine toimub samuti nagu asünkroonmasina puhul toitepinge sageduse reguleerimine (vt. Joonis 2.7).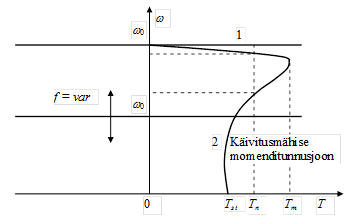 Joonis 2.7. Sünkroonmootori tunnusjoon. 1 – sünkroontalitluses; 2 – käivitamisel [21]
Joonis 2.7. Sünkroonmootori tunnusjoon. 1 – sünkroontalitluses; 2 – käivitamisel [21]
Püsimagnetitega sünkroonmootoritel ergutusmähis puudub ning ergutusvoog tekitatakse püsimagnetitega. Püsimagnetitega sünkroonmasina rootori ehitus on lihtne, mistõttu niisugune mootor on eriti töökindel muutuva kiirusega ajamites.
Reluktanstmootor (reluctance motor) on väljepoolustega sünkroonmasina vorm, milles puuduvad ergutusmähis ja püsimagnetid. Sellisel mootoril põhineb töö õhupilu magnetilise takistuse (ehk reluktantsi) muutumisel sõltuvalt rootori asendist.
Sünkroonmasinate põhilised kasutusalad on võimsad kompressorid, laeva veo- ja tüürimisajamid, veskid, pumbad, paberimasinad jm. Väikesevõimsuselisi püsimagnetergutusega masinaid kasutatakse tööpinkide ja robotite ajamites. Nad on võrreldes asünkroonmootoritega kallimad ning konstruktsioonilt keerulisemad [21].
Impulsstoitega mootorid
Sammmootorid erinevad sünkroonmootori selle poolest, et pöörlev magnetväli tekitatakse neis mitte kolmefaasisile siinuspingega, vaid järjestikuste impulsside jaotamisega masina mähistel. Samm-mootorid sobivad kasutamiseks väikese võimsusega positsioonjuhtimisega ajamites, mil mootorile antud impulsside arv on võrdeline rootori pöördenurga (ehk asendi) muutusega ning ajami positsioonimiseks pole vaja kasutada täiendavat asendiandurit. Sammu vähendamiseks ja positsioonimistäpsuse suurendamiseks valmistatakse samm-mootorid suure pooluste arvuga. Suurema võimsuse korral pole samm-mootorite kasutamine otstarbekas nende väikese kasuteguri tõttu [21].
Sammmootoriga elektriajam on kirjeldatud pikemalt peatükis 2.8.
Kaod elektrimootorites
Igas mehhanismis sh elektrimasinas tekkib paratamatult erinevaid kadusid. Kaod võivad tekkida järgmistel juhtudel [21]:
- Elektrivoolu kulgemisel läbi mähiste. Kuna mähistel on teatud aktiivtakistus, siis eraldub neil soojusenergiat. Kuna mähised koosnevad põhiliselt vasest, siis nimetatakse neid kadusid ka vaseskadudeks
- Magnetsüdamikus ajas muutuva magnetvälja toimel hüstereesist ja pöörisvooludest. Seda kadu tuntakse masina teraseskaona (ka rauaskaona). Teraseskadu on seda suurem, mida suurem ja massiivsem on magnetahel ning mida laiem on magnetmaterjali hüstereesisilmus ja suurem ümbermagneetimise sagedus.
- Masinaosade ja õhu vahelisest hõõrdest, mis põhjustab ventilatsioonikao.
- Masina laagrite hõõrdest, mis põhjustab hõõrdekao.
Mootori kasutegurit η saab tõsta nende kadude vähendamisega. Et vähendada vaseskadusid, tuleb kasutada võimalikult väikse aktiivtakistusega juhtmeid. Teraseskao vähendamiseks kasutatakse magnetmaterjalina ferromagnetilist materjali, vahelduvmagnetväljade puhul kasutatakse pöörisvoolude vähendmiseks lehtterast. Kuna magnetahelasse kuulub ka õhupilu, siis üritatakse teha mootori õhupilu võimalikult väikeseks. Hõõrdekadusid saab vähendada kvaliteetsete laagrite ning määrde valikuga.
Elektrimootorite talitlusviisid
Töömasinad võivad olla erineva talitusega, milleks elektrimootorid kui täiturmehhanismid peavad olema õigesti valitud. Sõltuvalt oludest võib muutuda töömasina koormus, pöörlemiskiirus, pöörlemissuund. Ka nende muutustega peavad mootorid tagama õige töö.
Talitused võivad olla järgmised [21]:
- ühtlasel püsikiirusel pööreldes (continuous constant speed rotation); ventilaator, ketassaag, elektertransport,
- muutuva kiirusega pööreldes (variable speed rotation); pump (rõhu lang), kõvaketas
- muutuva kiiruse- ja pöörlemissuunaga (rotation with variable speed in both directions); tõstemehhanismid: kraanad, liftid, robotid.
- ühtlaselt sirgjooneliselt (linear movement with constant speed); konveier
- perioodiliselt edasi – tagasi (periodical movement); trükkimisseadmed
- mitteperioodiliselt edasi tagasi (non- periodical movement). elektriline roolimehhanism autodes, positsioneerimisseadmed.
Elektrimootori pöörlemist ilma koormuseta nimetatakse tühijooksuks. Sellisel juhul tekib mootoris madal pöördemoment ning elektrimasin tarbib vähem voolu. Paraku jääb tarbitava reaktiivenergia kogus samaks, mistõttu on mootori võimsustegur cos φ madal.
Igasuguse mehhanismi töötamisel vabaneb teatud hulk soojust, mis tõstab selle osade (näiteks täiturmehhanismide) temperatuuri. Üheks temperatuuritundlikumaks osaks on seadme kunstmaterjalist valmistatud isolatsioon, mis kuumenedes üle teatud piiri võib üles sulada. Seadmete isolatsiooniklassid on määratud standardiga EN 60034, mis määrab ära ka elektrimootorite talitlusviisid (vt. Tabel 2.1). Elektriajamid võivad töötada nii püsirežiimis, kui ka tsükliliselt. Tavaliselt on mootorile märgitud suhteline lülituskestus protsentides, mis on koormuse kestuse tk ja tsükli (perioodi) T suhe (kataloogis mootori võimsused standardsete lülituskestuste jaoks 15 %, 25 %, 40 %, 60 %) [23].

Sageli valitakse mootori võimsus kestevtalitluse jaoks (S1), kuid suur osa elektriajameid töötavad ka teistes talitlustes. Näiteks tõstemasinad kord tõstavad, kord langetavad, kuid vahepeal esineb nende töös seisakuid (nt koorma laadimisel). Samuti puurimisseadmed, mis koormatakse vaid puurimise ajaks, pausi ajal on mootor välja lülitatud. See tähendab, et mootori võimsus võib erinevate talitlusviiside korral olla erinev, mistõttu tuleb talitlusviis täpselt ära määrata ajami projekteerimisel. Võimsates rakendustes, nagu tõsteseadmed ja tööstusrobotid, muutuvad moment ja kiirus talitluskestuse jooksul märgatavalt. Samuti vajatakse kiirenduse ajal suuremat kävitusmomenti ning pidurdamise ajal pidurdusmomenti.
Tabel 2.1. Elektrimootorite erinevad talitlusviisid EN 60034 järgi [23].
| Tüüp | Nimetus | Kirjeldus |
|---|---|---|
| S1 | KestevtalitlusContinuous running | Talitlusviis, kus masin töötab pidevalt nimikoormusel, mille kestus on küllaldane, et masina kõigi osade temperatuurid saavutaksid väljakujunenud väärtuse. |
| S2 | Lühiajaline talitlusShort-term | Masina töötamise aeg nimikoormusel on nii lühike, et masina üksikute osade temperatuurid ei jõua välja kujuneda. Töötamisele järgneb paus, mille vältel masin jõuab jahtuda temperatuurini, mis on kuni 2 °C kõrgem väliskeskkonna tempertuurist. |
| S3 | Vaheajaline talitlusIntermittent periodic | Koosneb perioodiliselt vahelduvastest nimikoormusvahemikest ja pausidest, kusjuures tsükli vältus ei ületa 10 minutit. Masin ei saavuta tsükli ühegi osa vältel püsitemperatuuri. |
| S4 | Vaheajaline talitlus olulise soojenemisega käivituselIntermittent periodic with a high startup torque | Koosneb perioodiliselt vahelduvatest käivitus -ja nimikoormusvahemikest ning pausidest. Käivituskadu on selles talitluses suhteliselt suur ja mõjutab oluliselt masina soojenemist. |
| S5 | Vaheajaline talitlus olulise soojenemisega käivitusel ja elektrilisel pidurduselIntermittent periodic with a high startup torque and electric braking | Koosneb perioodiliselt vahelduvatest käivitus-, nimikoormuse- ja pidurdusvahemikest ning pausidest. Käivitus- ja pidurduskaod on selles talitluses suhteliselt suured ja mõjutavad oluliselt masina soojenemist. |
| S6 | Koormusmuutlik talitlusContinuous-operation periodic | Pidevalt toitevõrku lülitatud mootori nimikoormus-vahemikud vahelduvad tühijooksuvahemikega, kusjuures masina osade temperatuurid ei jõua koormuse ega tühijooksu ajal välja kujuneda. |
| S7 | Suunamuutlik talitlusContinuous-operation periodic with a high startup torque and electric braking | Lühikesed nimikoormusvahemikud järgnevad üksteisele pöörlemissuuna vaheldumisega. Pidurdus- ja käivituskaod on selles talitluses suhteliselt suured ja mõjutavad oluliselt masina soojenemist. |
| S8 | Kiirusmuutlik talitlusContinuous-operation periodic with related load-speed changes | Lühikesed nimikoormusvahemikud järgnevad pidevlt üksteisele nimikiiruse vaheldumisega mingi teise kiirusega. Üleminek ühelt kiiruselt teisele on seotud suhteliselt suurte kadudega, mis mõjutavad oluliselt masina soojenemist. |
Tabelist võib näha, et talitlusviisid S2, S3 ja S6 võimaldavad väiksemat mootori võimsust kui S1, sest nende koormamiste ajal ei saavuta mootori osad lubatud suurimat temperatuuri väärtust. Talitlusviisid S4, S5, S7 ja S8 aga suuremat mootori võimsust kui S1, sest töö ajal soojenevad nad rohkem kui kestevtalitluse puhul.
Kaitseastmed
Täiturmehhanismi ehitus ja töö tingimused sõltuvad asukohast, kuhu nad paigaldatud on. Sõltuvalt keskkonnast tagatakse neile löögi- ja vibratsioonikindlus, tolmu ja vee kindlus. Näiteks väga niisketes, keemiliselt agressiivsetes, kuumades, kõrge radiatsioonitasemega keskkondades tuleb seadmeid ümbritseva keskkonna mõjude eest kaitsta. Kaitse tagatakse kaitsekattega, mille kaitseklass vastab standardile EN 60529 kodeeringuga IP XY (International Protection), mille tähendused on toodud tabelis 4.2.
Tabel 2.2. Kaitseklassid ja nende tähendused
| IP | X- kaitse juhupuute eest | Y- kaitse vee sissetungi eest |
|---|---|---|
| 0 | Kaitse puudub | Kaitse puudub |
| 1 | Esemed ja tahked kehad läbimõõduga üle 50 mm | Vertikaalselt langevad veetilgad |
| 2 | Sõrmed ja tahked kehad läbimõõduga üle 12 mm | 15° nurga all langevad veetilgad |
| 3 | Tööriistad ja tahked kehad läbimõõduga üle 2,5 mm | Tihedad, kuni 60° nurga all langevad pritsmed (vihm) |
| 4 | Tööriistad ja tahked kehad läbimõõduga üle 1 mm | Kõikidest suundadest pritsiv vesi |
| 5 | Kõik esemed ja kahjulikud tolmuosakesed | Veejoad kõikidest suundadest |
| 6 | Puutekindel ja tolmukindel | Voolav vesi |
| 7 | Veekindel, vee all kuni sügavuseni 1 m | |
| 8 | Surve all langev vesi, või vee all allpool sügavust 1 m |
Lisaks tabelis 4.2 mainitud kaitseviisidele tuleb tagada iga elektriga töötava täituri elektriline kaitse, kas siis kere maandamisega, isolatsiooni tugevdamisega, eraldustrafo kasutamisega või täieliku puuteohutuse tagamisega.
Asünkroonmootori tööpõhimõte
Asünkroonmootor on tööstuses kõige enam kasutatav elektrimootor, mis on tingitud eelkõige tema lihtsast konstruktsioonist. Asünkroonmootor koosneb paigalseisvast staatorist ning pöörlevast rootorist, mis on üksteise suhtes paigutatud nii, et nende vahel eksisteeriks õhupilu laiusega kuni 0,1…1 mm. Asünkroonmootori ehitus on näidatud Joonis 2.8.
 |
Joonis 2.9. Ühe ja kahe pooluspaariga lühisrootoriga asünkroonmootor
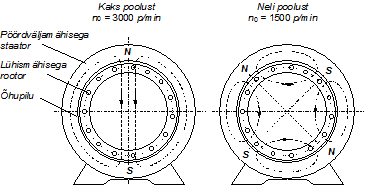
Asünkroonmootori staator koosneb mitmest vasktraadist mähisest, mis on üksteise suhtes ruumiliselt nihutatud ning mida toidetakse kolmefaasilisest elektrivõrgust. Mähised võivad olla ühendatud kas kolmnurka või tähte. Selline paigutus tekitab ümber staatori pöörleva magnetvälja, mis läbi õhupilu aheldub rootoris olevatel mähistel ning tekitab rootori elektrivoolu (elektromagnetilise induktsiooni nähtus). Vool tekitab rootoris omakorda magnetvälja, mille vastasmõjul staatori magnetväljaga tekkib jõud, mis paneb mootori pöörlema. Rootori pöörlemise kiirus sõltub magnetvälja pöörlemise kiirusest, mis omakorda sõltub mootori pooluspaaride arvust p ja toitesagedusest f. Joonis 2.9 on näidatud ühe ja kahe pooluspaariga lühisrootoriga asünkroonmootor, mille pooluspaaride arv on määratud staatori pooluspaaride arvuga.
a

b
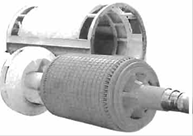
Joonis 2.10. Asünkroonmootorites kasutatavad rootorid. a – lühisrootor; b – faasirootor [24].
Tänapäeval kasutatakse põhiliselt faasi- ja lühisrootoriga asünkroonmootoreid. Faasirootoriga mootoris (slip ring rotor) muudetakse rootori kiirust takistuse muutmisega rootori ahelas kasutades selleks spetsiaalseid harjakesi, mis aga kuluvad kiiresti. Järjest enam leiab kasutust lühisrootoriga asünkroonmootor (squirrel cage), kus rootori mähised on omavahel lühistatud ning kogu elektrilise energia ülekanne toimub läbi õhupilu.
Staatori magnetvälja pöörlemise kiirust nimetatakse sünkroonkiiruseks, mis avaldub

kus ns on mootori sünkroonkiirus (p/min), f on toitepinge sagedus ning p on pooluspaaride arv. Nagu näha, sõltub magnetvälja pöörlemise kiirus ka pooluspaaride arvust. Mida suurem on pooluspaaride arv, seda väiksem on sünkroonkiirus, kuid suurem arendatav pöördemoment. Erinevatele pooluspaaride arvule vastavad välja sünkroonkiirused toitesagedusel 50 Hz on ära toodud Tabel 2.3.
Tabel 2.3. Pooluspaaride arvule vastavad sünkroonkiirused
| Pooluspaaride arv | Sünkroonkiirus p/min |
|---|---|
| 1 | 3000 |
| 2 | 1500 |
| 3 | 1000 |
| 4 | 750 |
| 5 | 600 |
Mootori pöörlemiskiirust võib anda ka pöörlemisnurkkiirusena ω, mis näitab mootori pöörlemiskiirust radiaanides sekundi kohta.

Asünkroonmootori tegelik pöörlemiskiirus on staatori magnetvälja pöörlemise kiirusest väiksem. Seda iseloomustab libistus s, mis näitab mootori pöörlemiskiiruse n erinevust sünkroonkiirusest ns ja avaldub
Koormuse suurenemisega suureneb ka libistus, mille väärtuseks on tavaliselt 1-5 %. (actuators raamat, sinine). Asünkroonmootori poolt arendatav nimipöördemoment M võllil on avaldatav
kus ωs on sünkroonnurkiirus ja Pmeh on mehaaniline võimsus mootori võllil, mis on antud mootori nimesildil.
Momendi mõjumisel hakkab mootor seisvast asendist ennast kiirendama kiirendusega ε, mis näitab pöörlemiskiiruse muutumise kiirust ning mõõdetakse radiaanidega sekundruudu kohta. Teades mootori kiirendust saab välja arvutada mootori käivitamise aja mõne pöörlemiskiiruseni.

Iga seadme töös esineb paratamatult kadusid st. osa elektrivõrgust tarbitud energiast kulub mootori soojenemiseks, jahutamiseks, magneetimiseks, hõõrdumiseks laagrites jm. Mootori efektiivsust, kasuliku töö ja kogu tarbitud energia suhet, iseloomustab kasutegur η.

kus Pmehon mehaaniline võimsus mootori võllil ja Pel mootori poolt tarbitav võimsus elektrivõrgust. Mida kõrgem on mootori kasutegur, seda rohkem tarbitud energiast läheb kasulikuks tööks. Elektrimootorite kasutegur jääb tavaliselt vahemikku 0,8…0,95.
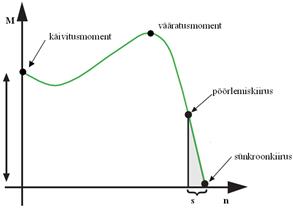
Asünkroonmootori pöördemomendi sõltuvust pöörlemissagedusest iseloomustab tema mehaaniline tunnusjoon, mis on näidatud Joonis 2.11, a. Mootori käivitamiseks on vaja tekitada mootoris käivitusmoment, mis on mootori nimimomendist 1…3 korda suurem. Suurimat momenti, mida mootor käivitamisel saavutab nimetatakse vääratusmomendiks. Nimipöörlemiskiiruse saavutamisel, mis on libistuse s korda väiksem kui sünkroonkiirus, töötab mootor oma nimirežiimis (nimipöörlemiskiirusel ja nimimomendil). Asünkroonmootori tööpunkt võib sõltuvalt koormusest varieeruda lubatud libistuse piirides (2…8 %).
 a a | 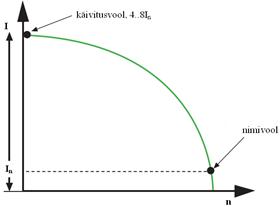 b b |
Joonis 2.11. Asünkroonmootori tunnusjooned otsevõrku käivitamisel. a – M/n tunnusjoon; b – I/n tunnusjoon [21]
Mootori lubatav ülekoormus momendi järgi on 1,6…1,8 korda suurem nimimomendist. Suurema koormusmomendi puhul võib mootor nö vääratuda (vääratusmoment). Sel juhul kiirus väheneb järsult ning mootori mähised hakkavad väga kiiresti kuumenema.
Joonis 2.11, b on näidatud voolu sõltuvust pöörlemiskiirusest. Nagu on näha, võib asünkroon-mootori otsevõrkkäivitusel käivitusvool olla nimivoolust In 4 … 8 korda suurem.
Asünkroonmootori sildiandmed
Igale mootorile on kere külge ühendatud seda mootorit iseloomustavad sildiandmed, millelt saab kasutaja välja lugeda, kuidas mootorit tuleb kasutada. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine on toodud Joonis 2.12. Samuti on ära märgitud mootori nimesildile kantavad olulisemad andmed.
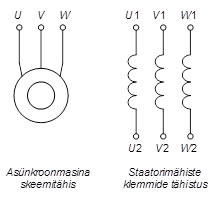 Joonis 2.12. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine [21]. Joonis 2.12. Lühisrootoriga asünkroonmootori skeemitähis ja mähiste tähistamine [21]. | Asünkroonmasina sildiandmedTootja nimiMootori tüüp, sarjanumberNimivõimsus Pn Nimipinge ja mähiste lülitus Un Sünkroonkiirus (pooluste arv) n0 Nimilibistus sn Nimikasutegur hn Nimivõimsustegur jn |
Asünkroonmootori ühendamine toiteallikaga
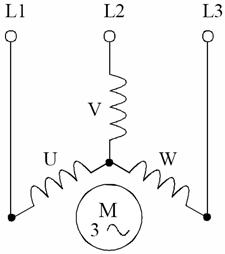
1. Tähtühendus
Tähtühenduse korral on mootori mähised ühendatud nii, et kolme mähise lõpud on omavahel ühes punktis kokku ühendatud. Seda punkti nimetatakse nullpunktiks. Mähiste algused on ühendatud toitesüsteemiga. Tähtühendust tähistatakse sümboliga Y. Tähtühendus on illustreeritud Joonis 2.13.
 a a | 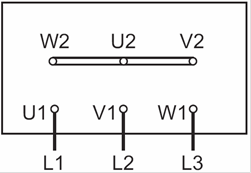 b b |
| Joonis 13. Asünkroonmootori tähtühendus. (a) skemaatiline tähistus; (b) toitekaabli ühendamine mootori klemmidele. | |
Tähtühenduse korral kehtivad järgmised elektrilised seosed:
![]() – faasivool on võrdne liinivooluga.
– faasivool on võrdne liinivooluga.
![]() – liinipinge on faasipingest teguri
– liinipinge on faasipingest teguri ![]() korda suurem
korda suurem
![]() – näivvõimsus
– näivvõimsus
![]() – aktiivvõimsus
– aktiivvõimsus
![]() – reaktiivvõimsus
– reaktiivvõimsus
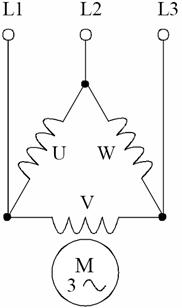
2.Kolmnurkühendus
Kolmnurkühenduse korral on mootori mähised ühendatud nii, et ühe mähise algus on ühendatud teise mähise lõpuga. Nende mähiste ühenduspunktid on ühendatud toitesüsteemiga, mida illustreerib Joonis 2.14. Tähtühendust tähistatakse sümboliga Δ.
 a a | 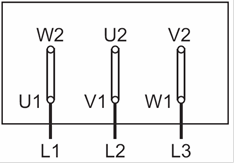 b b |
| Joonis 2.14. Asünkroonmootori kolmnurkühendus. (a) skemaatiline tähistus; (b) toitekaabli ühendamine mootori klemmidele. | |
Kolmunrkühenduse korral kehtivad järgmised elektrilised seosed:
![]() – faasivool on liinivoolust teguri
– faasivool on liinivoolust teguri ![]() korda suurem.
korda suurem.
![]() – liinipinge on faasipingega võrdne.
– liinipinge on faasipingega võrdne.
![]() – näivvõimsus
– näivvõimsus
![]() – aktiivvõimsus
– aktiivvõimsus
![]() – reaktiivvõimsus
– reaktiivvõimsus
Kolmnurka ühendatud mootor tarbib võrgust 3 korda suuremat võimsust, kui samasse võrku ühendatud tähtühenduse korral. Kolmnurka tohib ühendada mootoreid vaid sellisel juhul, kui mootori mähised vastava pinge ja voolude jaoks ette nähtud on.
Mootori ühendamisel tuleb tähelepanu pöörata mootori sildiandmetele ja mootori ühendamise viisile. Kui mootori sildiandmetel on kirjas Δ/Y 230 / 400 V, siis tohib Euroopa elektrivõrgus liinipingega 400 V mootorit ühendada ainult tähte. Tähte ühendamisel langeb igale mähisele pinge 230 V, kolmnurka ühendamise puhul aga 400 V, mis põhjustab suuri voolusid ning võib viia mootori ülekuumenemise ja riknemiseni. Sellist mootorit tohib ühendada kolmnurka ainult kolmefaasilisse võrku liinipingega 230 V, mis võib olla saavutatud näiteks trafo abiga. Kui mootori sildiandmetel on kirjas Δ/Y 400 / 690 V, siis tuleb mootorit samasse toitevõrku optimaalse töö tagamiseks ühendada kolmnurka, sest siis langeb igale mähisele pinge 400 V. Kui ühendada see mootor tähtühendusse langeb mähistele aga pinge 230 V ning mootori ressurss ei ole optimaalselt ära kasutatud. Sellist mootorit tohib ühendada tähte mõnda tööstuslikku elektrivõrku, kus on kolmefaasiline toide liinipingega 690 V.
Arvutusülesanne I
Kolmefaasilisel lühisrootoriga asünkroonmootoril, mille staatorimähised on ühendatud kolmnurka, on järgmised sildiandmed. Mootor on ühendatud 3- faasilisse toitevõrku liinipingega 400 V ja sagedusega 50 Hz. (a) Arvutada otsitavad suurused mootori töötamisel nimivõimsusel. (b) Kuidas muutuvad võrgust tarbitavad võimsused, kui samasugune mootor on ühendatud samasse toitevõrku aga tähte?
| Sildiandmed | Otsitavad suurused |
|---|---|
| võimsus Pmeh = 5,5 kWpinge U = 400/ 690 V Δ/ Yvool I = 11/ 6,4 A Δ/ Ysagedus f = 50 Hzpöörlemiskiirus n = 1460 min-1võimsustegur cos φ = 0,84 | Võimsused S, P, Qkasutegur ηpooluspaaride arv plibistus svõllil arendatav moment Mtarbitav energia 1,5 h jooksulelektrienergia hind, kui 1 kWh maksab 1,60 EEK |
Lahendus (a):
Võrgust tarbitav koguvõimsus
![]() VA
VA
Võrgust tarbitav aktiivvõimsus
![]() W
W
Võrgust tarbitav reaktiivvõimsus
![]() var
var
Kasutegur
Pooluspaaride arv
Kuigi staatorivool on nimisildil antud, võib selle läbi teiste parameetrite arvutada ka
![]() A
A
Libistus ehk kiiruse erinevus staatorvälja ja rootori pöörlemiskiiruse vahel.
Võllil arendatav moment
![]() Nm
Nm
Tarbitav aktiivenergia 1,5 h jooksul
![]() Wh
Wh ![]() kWh
kWh
Elektrienergia hind
![]() EEK
EEK
Lahendus (b):
Tähtühenduse korral langeb ühele mähisele väiksem pinge
![]() V
V
Et arvutada sellisel pingel mähiseid läbivat voolu, peame esmalt määrama ära ühe faasi takistuse. Kuna tähtühenduses on liinivool võrdne faasivooluga, milleks nimirežiimil on 6,4 A, ning ühele mähisele langeb pinge 400 V siis saame, et
![]() Ω
Ω
Faasi ja liinivoolu väärtuseks kujuneb Ohmi seaduse järgi, pinge 230 V juures
![]() A
A
Näivvõimsus on seega
![]() VA
VA
Nüüd võrreldes tarbitud võimsust täht- ja kolmnurkühenduses saame, et kolmnurkühenduses arendab mootor (ja tarbib seega võrgust) 3 korda suuremat võimsust.

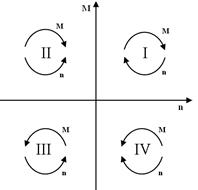
Generaatori ja mootori talitlus
Elektriajami töös võib muutuda mootori pöörlemiskiirus, koormusmoment ning teatud juhtudel ka pöörlemissuund. Kui elektrimasin muundab elektrilist energiat mehaaniliseks, siis töötab ta mootori režiimis. Kui elektrimasin muundab mehaanilist energiat elektriliseks, siis töötab ta generaatori režiimis. Sõltuvalt režiimist jaotatakse mootori tööd nelja nö kvandrandi vahel (vt. Joonis 2.15). Mootoritalituse korral toimivad mootori moment ja pöörlemiskiirus ühes suunas (kvadrandid I ja III, Joonis 2.15). Näiteks koormuse tõstmisel tuleb mootorile rakendada moment, mis on mootori pöörlemisega samasuunaline. Generaatoritalituse korral toimivad mootori moment ja pöörlemiskiirus vastassuundades (kvadrandid II ja IV, Joonis 2.15). Näiteks kraana koormuse langetamisel teeb tööd gravitatsioonijõud ning mootor peab töötama sellele vastu, et koormust mitte liiga kiiresti alla lasta st pidurdama. See tähendab, et kuigi mootor pöörleb ühes suunas, peab talle vastu mõjuma pidurdusmoment. Koormuse langetamisel muundatakse mehaaniline energia elektriliseks.
Lühidalt, mootori generaatoritalitlust võivad ajamis põhjustada alljärgnevad tingimused.
Mootorit käitab töömasin (näiteks auruturbiin, sisepõlemismootor) st kiiruse suurenemisel üle sünkroonkiiruse arendab mootor töömasinat pidurdavat generaatormomenti.
Mootorit pidurdatakse rekuperatiivpidurdusega st ajamit peatatakse konstantse momendiga.
Joonis 2.15. Elektriajami momendi-kiiruse neli kvadranti [21].
Lihtsamad ajamid töötavad tavaliselt I kvadrandis (mootoritalituses), mõnedel ajamitel on pöörlemissuund muutumatu, kuid muutub momendi suund (nt kiirendamisel ja pidurdamisel). Samuti esineb olukordi, kus elektriajam töötab muutumatu suunaga momendiga, aga muutub mootori pöörlemissuund (nt koormuse tõstmisel ja langetamisel). Kui elektriajam on varustatud vastava muunduriga, siis võib ta talitada kõigis neljas kvadrandis.
Asünkroonmootori käivitamine
Asünkroonmootori käivitus on eriti problemaatiline suurematel võimsustel. Mootori staatorivool ulatub käivituse ajal kuni 7-kordse nimivooluni. Võimsate asünkroonmootorite otsevõrkukäivitus (direct on-line, DOL) põhjustab elektriliinides suuri voolutõukeid. Lisagem, et mootori käivitusvoolu tugevus ei sõltu koormusest ning on igal mootoril kindel suurus. See on antud mootori sildil nimi-käivitusvoolukordsusena Ikäiv/In, mis on tavaliselt 4…7. Pikkade liinide ja suure sisetakistusega võrkude korral põhjustab võimsa mootori käivitus ajutiselt teiste elektritarvitite pinge olulist vähenemist. Seejuures on asünkroonmootori käivitusmoment, võrreldes alalisvoolumootoriga, suhteliselt väike, mistõttu suure koormuse ja inertsimomendi, s.o raske käivituse, puhul venib käivitusprotsess pikaks. See asjaolu põhjustab omakorda mootori mähiste olulist kuumenemist käivitusprotsessis ning sobiva kaitse puudumisel tekib oht mähise isolatsioonile. [21]
Lühisrootoriga asünkroonmootori käivitamiseks on mitu võimalust:
Otsevõrkkäivitus on kõige lihtsam käivitusmeetod, mille puhul ühendatakse mootor otse võrku, tavaliselt läbi pealüliti ja ülekoormuskaitse. Meetod on lihtne, ega vaja mingeid keerukaid juhtimissüsteeme, kuid kutsub esile kõige suuremat käivitusvoolu, mis võib olla kuni 8 korda suurem mootori nimivoolust. Kuna mootor pole algselt pingestatud, siis tegelik vooluimpulss võib olla kuni 14 korda suurem nimivoolust. Lisaks suurele käivitusvoolule on vajalik ka suur käivitusmoment, mis on mitu korda kõrgem kui nimitalitluseks vaja ja kutsub seega esile ebavajalikke jõude ja pingeid mehaanilistes ülekannetes. Sellele vaatamata kasutatakse seda meetodit lihtsuse pärast väga laialt. Otsevõrkkäivituse mehaaniline tunnusjoon on toodud joonisel Joonis 2.11.
Täht-kolmnurkkäivituse meetodiga on võimalik vähendada käivitusvoolu (kuni 30 %) ja käivitusmomenti (kuni 25 %). Juhtseade koosneb lülitisti, liigkoormuskaitsest ja timerist, kus on programmeeritud aeg täht- kolmnurga ümberlülituseks. Mootorit käivitatakse alguses tähtühenduses (tähtühenduses jooksevad mootoris väiksemad voolud) ning lülitatakse hiljem kolmnurka. Mootor peab eelnevalt olema ühendatud kolmnurka. Kui mootor on paigalseisus raskelt koormatud, ei sobi see meetod mootori käivitamiseks. Selline meetod sobib aga ventilaatorite ja pumpade käivitamiseks.
Käivitamine sujuvkäivitiga on võimalik tänu jõuelektroonikale, kus kasutatakse vahelduvpingeregulaatorit pinge efektiivväärtuse sujuvaks tõstmiseks, mis vähendab käivitusvoolu ja momenti. Asünkroonmootori käivitamine sujuvkäivitiga on lähemalt käsitletud punktis 2.7.
Käivitamine sagedusmuunduriga on kõige paremaks viisiks mootori käivitamiseks ning pöörlemiskiiruse reguleerimiseks. Tänapäeval on sagedusjuhtimisega vahelduvvooluajam leidnud kasutust peaaegu kõigil aladel, kus traditsiooniliselt rakendati alalisvooluajamit. Asünkroonmootori käivitamine sagedusmuunduriga on lähemalt käsitletud punktis 2.6.
Tabel 2.4 kirjeldab kõikide eespool mainitud käivitusmeetodite kasutamise iseärasusi ja probleeme asünkroonmootori käivitamisel ja pidurdamisel.
Tabel 2.4. Erinevate Käivitusmeetoditega kaasnevad probleemid mootorite käivitamisel ja pidurdamisel [21]
| Probleem | Otsevõrkkäivitus | Täht-kolmnurk-käivitus | Sagedusmuundur | Sujuvkäiviti |
|---|---|---|---|---|
| Rihma libisemine / kulumine laagritel | Jah | Keskmine | Ei | Ei |
| Suur käivitusvool | Jah | Ei | Ei | Ei |
| Ülekandemehhanismisuur kulumine | Jah | Jah | Ei | Ei |
| Kauba kahjustamine pidurdamisel | Jah | Jah | Ei | Ei |
| Hüdraulilised löögid pidurdamisel | Jah | Jah | Ei, parim lahendus | Jah, vähendatud |
| Transmissioon peaks | Jah | Jah | Ei | Ei |
Tabelist selgub, et otsevõrkkäivitus on kogu süsteemi mehaanika jaoks kõige probleemirikkam, samuti ka täht-kolmnurkkäivitus. Parimateks lahendusteks on käivitamine sagedusmuunduri- või sujuvkäivitiga.
Asünkroonmootori pidurdamine
Elektriline pidurdus kujutab endast talitlusviisi, kus mootori poolt toodetud energia tagastatakse ümbritsevasse keskkonda. Mootori pöördemoment mõjub sel juhul liikumist takistavalt (masin töötab generaatori talitluses, vt. pt.2.5.5). Selline talitlus esineb juhtudel, kus koormus järsult aeglustub või peatub, näiteks koormuse langetamisel. Kui koormuse inerts on suur, tuleb sellega arvestada juhul, kui mootorit on tarvis täiskiiruselt kiiresti peatada. Kuna pidurdamiseks on vajalik täiendav moment, siis tuleb pidruduse vältel koormuse energia hajutada. Ajamis salvestub kahte tüüpi energiat, mis tuleb pidurduse vältel hajutada:
a) Inertsi või kineetiline energia, põhiliselt pöörlevates ja lineaarmasinates, mis avaldub sirgjooneliselt liikuva keha puhul

kus m on keha mass ja v on sirgliikumise kiirus. Pöörleva keha puhul

kus J on keha inertsimoment ja ω on nurkkiirus.
b) Potentsiaalne energia, põhiliselt liftides ja tõstukites, mis võivad liikuda ühtlaselt ja kiireneda aeglaselt. Pidurdamisel tuleb rakendada kogu võimsust, et hoida kiirus muutumatuna, kui koormus langeb. Ajamis salvestunud potentsiaalne energia avaldub

kus m on keha mass, g on Maa raskuskiirendus ja h on kõrgus maapinnast.
Võimsuskaod elektriajamis, mehaaniline takistus ja kaod ülekandemehhanismis tulevad aeglustamisel kasuks, kuna need vähendavad nõutavat pidurdusvõimsust (pratatamatult põhjustavad seal energia hajumist nt soojusena). Regenereeritud potentsiaalne energia sõltub maksimaalsest võimsusest ja väljajooksu ning peatumiskestusest.
Ajal, mil mootor pidurdab muundatakse mehaaniline energia (kineetiline või potentsiaalne) elektrienergiaks ning parimaks võimaluseks oleks see energia tagastada toitevõrku. Energiat saab hajutada ainult siis, kui energial on nö kuhu minna. Võimaldamaks mootori aeglustamist, tuleb energia hajutada, mida võib teha seda energiat salvestades või muundades teiseks energialiigiks. Selleks on mitu võimalust [23].
- Võimalik on tagastada elektrienergiat toitevõrku, kus see energia tarbitakse ära teiste võrku ühendatud tarbijate poolt seda nimetatakse elektrienergia rekuperatsiooniks.
- Elektrienergia muundada soojuseks, lastes elektrivoolul kulgeda läbi pidurdustakisti (elektrivoolu läbimisel läbi aktiivtakisti eraldub soojusenergiat).
- Energiavahetus mitmemootorilistes rakendustes (pidrudusenergiaga toidetakse teisi sama muunduriga ühendatud mootoreid)
- Dünaamiline pidurdus, kus koormuse kineetiline energia muundatakse soojuseks mootoris endas.
Elektrienergia rekuperatsiooni peamiseks eeliseks on elektrienergia saadavus kõigile samasse võrku ühendatud seadmetele. Kuna aga selline lahendus on kallim ning suurendab muunduri massi ja mõõtmeid, siis on see otstarbekas suurte võimsuste puhul nt elektrirongides, suurtes kraanades.
Dünaamiline pidurduse puhul ei tagastata elektrienergiat toitevõrku, vaid antakse kogu mootori pöörlemisel tekkiv energia ära pidurdustakistisse, kus see muundatakse ära soojuseks.
Alalisvoolupidurdus on kõige lihtsam pidurdusviis. Alalisvoolupidurduse korral lahutatakse mootor toitevõrgust ning mähistesse juhitakse alalisvool. Alalisvoolu läbilaskmisel läbi mootori mähiste tekitatakse staatoris paigalseisev magnetväli, mis tekitab rootoris pidurdus- ja hoidemomendi. Sel ajal energiat võrku tagasi ei anta. Alalisvooluga pidurdamisel ei ole võimalik määrata mootori pidurdusaega, kuna pinge sagedus on võrdne nulliga (alalisvoolu puhul f = 0 Hz), mis tähendab, et puudub mootori kiiruse juhtimine. Rootorile mõjub sujuv pidurdusmoment ning seetõttu kasutatakse rootori pidurdamiseks ja seisval rootoril pidurdusmomendi hoidmiseks alalisvoolupidurdust lühikeste ajavahemike vältel. Sagedane alalisvoolupidurdus võib põhjustada mootori liigkuumenemist ning seetõttu on soovitav kasutada selleks vajalikke kaitseseadmeid.
Aga loomulikult võib ajami peatumine toimuda ka vaba väljajooksu või aeglustusrambiga. Vaba väljajooksu puhul katkestatakse mootoril toide ning jäetakse mootor jooksma kuni koormus ja hõõrdejõud teda ei peata. Aeglustusrambi puhul aeglustatakse mootori kiirust sageduse vähendamisega kuni pidurdussageduseni ja rakendatakse seejärel dünaamilist pidurdust. Pidurdussageduseks loetakse sagedust, millest allpool rakendatakse mootori dünaamilist pidurdust [25].
Arvutusülesanne II
Kolmefaasiline asünkroonmootor kiireneb nimikoormusel 1,5 sekundiga pöörlemiskiiruseni n = 2850 p/min. Määrata mootori pooluspaaride arv p, libistus s, nurkkiirus ω ning nurkkiirendus ε. Kui suur peab olema staatorivälja pöörlemise kiirus, et rootori pöörlemiskiirus oleks n = 1000 p/min?
Lahendus:
On ilmselge, et mootori sünkroonpöörlemiskiirus on 3000 p/min. Tabel 2.3 näitab, et mootoril on 1 pooluspaar.

Mootori libistus avaldub
Mootori nurkkiirus
![]() s-1
s-1
Mootori nurkkiirendus
![]() s-2
s-2
Selleks, et rootori pöörlemiskiirus oleks n = 1000 p/min peab staatorvälja pöörlemise kiirus olema libistuse võrra suurem.
![]() p/min
p/min
Sagedusmuunduriga elektriajam
Sagedusmuundur ja tema tööpõhimõte
Sagedusmuundur (frequency converter) on tänapäeval kasutatavates elektriajamites põhi-komponendiks kiiruse reguleerimiseks. Traditsiooniliselt oli sagedusmuundur ette nähtud mootori toitepinge ja sageduse sujuvaks reguleerimiseks. Tänapäeval kujutab sagedusmuundur terviklikku ajamiplokki, mis sisaldab toitemuundurit, andureid, juhtseadet ning võimaldab juhtida elektrimootorit ja tema poolt käitavat töömasinat. Samuti on võrguliidese abil ajamit rakendada keerukates automaatjuhtimissüsteemides
Tänapäeval kasutatakse erinevat tüüpi sagedusmuundureid, kõige enamasti alalisvoolu vahelüliga muundurit.
Sagedusmuundur koosneb mittejuhitavast kolmefaasilisest alaldist, alalisvoolu vahelülist ning vaheldist.
Alaldi (rectifier) koosneb kuuest dioodist (iga faasi peale 2 dioodi) ning on ette nähtud vahelduvvoolu muutmiseks alalisvooluks. Alaldi väljundis on pulseeriv alalisvool pingega Uz, mis kolmefaasilise 400 V süsteemi puhul omab väärtust ![]() V.
V.
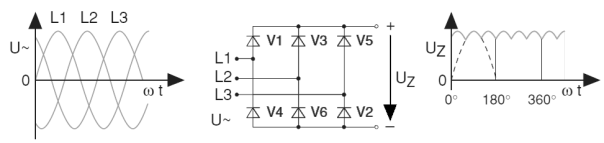
Joonis 2.17. Kolmefaasilise mittejuhitava sildalaldi tööpõhimõte [26].
Alalisvoolu vahelüli (DC link) koosneb omakorda kondensaatorist, käivitus- ja pidurdusahelast. Alalisvoolu vahelülis silutakse alalisvoolu pulsatsioonid ära kondensaatori abil. Kui muundur lülitatakse võrku tekkib kondensaatori laadumise tõttu väga suur vooluimpulss, mistõttu on alalisvoolu vahelülisse sisse ehitatud türistoriga juhitav pidurdusahel. Takisti piirab voolu väärtust, kondensaatorid laaduvad aeglasemalt ning ohutult. Kui kondensaatorid on laetud viiakse türistor kinnisesse olekusse ning takisti lühistatakse. Pidurdusahelat kasutatakse dünaamilisel pidurdamisel, et ära hajutada pidurdamisel vabanevat soojusenergiat. Pidurdusahel on juhitav transistoriga. Sagedusmuunduri väljalülitamisel võib kondensaatorile jääda eluohtlik kõrgepinge veel kuni viieks minutiks, mistõttu tuleb olla eriti ettevaatlik äsja väljalülitatud seadmega.
Vaheldis (inverter) muundatakse alalisvool muutliku pinge ja sagedusega vahelduvvooluks. Vaheldi koosneb kuuest transistorist ja antiparalleelselt ühendatud dioodidega. Muundurit juhitakse transistoride juhtimisega kasutades selleks pulsilaiusmodulatsiooni põhimõtet (vt. punkt 2.6.5). Muunduri väljund on ühendatud mootori klemmidega.

Joonis 2.18. ABB komponentajam ACS 150 [21]
Sagedusjuhtimine
Üheks kõige levinumaks vahelduvvoolumootorite kiiruse reguleerimise viisidest on mootori sagedusjuhtimine (frequency control), kus mootori pinge antakse ette sageduse funktsioonina ![]() . Kõige lihtsamal juhul hoitakse pinge ja sageduse suhe konstantsena
. Kõige lihtsamal juhul hoitakse pinge ja sageduse suhe konstantsena ![]() . See suhe tuleneb asjaolust, et sageduse kasvades suurenevad ka kaod mootori mähistes (vt. punkti 2.6.5.), mistõttu tuleb sagedusega f suurendada ka pinget U. Asünkroonmootori pinge- sageduse juhtimise plokkskeem on toodud Joonis 2.19. Tärn (*) suuruste juures tähendab etteandesuurust.
. See suhe tuleneb asjaolust, et sageduse kasvades suurenevad ka kaod mootori mähistes (vt. punkti 2.6.5.), mistõttu tuleb sagedusega f suurendada ka pinget U. Asünkroonmootori pinge- sageduse juhtimise plokkskeem on toodud Joonis 2.19. Tärn (*) suuruste juures tähendab etteandesuurust.
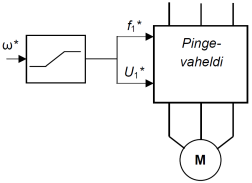
Joonis 2.19. Asünkroonmootori pinge- sageduse juhtimise plokkskeem [23].
Sagedusjuhtimist nimetatakse ka skalaarjuhtimiseks või avatud ahelaga juhtimiseks (Open loop control), kuna sellisel süsteemil puudub tagaside, mistõttu sagedusmuundur ei teagi, kui kiiresti mootor tegelikult pöörleb ja kas üldse pöörleb. Küll aga tagatakse vastavalt nimiandmetele mootori liigkoormuskaitse (tavaliselt 150% nimivoolust) voolutugevuse mõõtmisega ning vajaduse korral väljalülitamisega (7). Järsk koormuse muutus võib põhjustada mootori vääratumise st tööpunkti nihkumist väärtuspunkti (vt. Joonis 2.11). Selle tulemusena mootor seiskub või jääb pöörlema väikesel kiirusel, millega kaasneb mähiste temperatuuri tõus. Seetõttu on sagedusjuhtimisel (skalaarjuhtimisel) probleemiks koormusele vastava momendi tekitamine ning selleks sobiva pinge rakendamine mootorile [25]. Sageduse ja pinge reguleerimine sobib hästi valdavalt püsitalitluses töötavate mootorite puhul, kui sagedus ja pinge muutuvad suhteliselt aeglaselt [21].
Väikestel sagedustel hakkab mootori moment vähenema, sest üha suuremat tähtsust etendavad kaod mähise aktiivtakistusel.
Väljatugevuse vähenemine nimisagedusest suurematel sagedustel
Mootori sageduse suurenemisel üle nimisageduse peab mootori toitepinge jääma konstantseks. Sellisel juhul hakkab mootori vool ja järelikult ka magnetvälja tugevus vähenema ning mootor läheb üle vähendatud väljatugevusega režiimi (field weakening mode). Mootori poolt arendatav moment hakkab vähenema, kusjuures libistus ja võimsus jäävad muutumatuks. Välja nõrgenemise väheneb moment pöördvõrdeliselt

ja suurim lubatud moment

väheneb see ruutkarakteristiku järgi ning selles režiimis väheneb ka mootori taluvus ülekoormusele, millega tuleb arvestada.
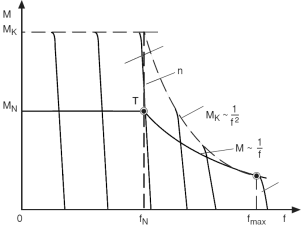
Joonis 2.20. Momendi tunnusjooned nõrgendatud välja piirkonnas
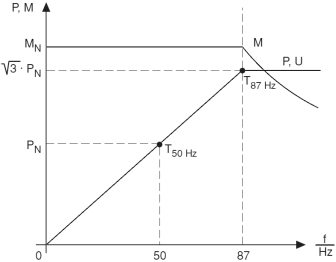
Konstantse momendi talitlus kuni 87 Hz sageduseni
Sagedusjuhtimisega ajami põhisagedust võib mõnel juhul suurendada ka kuni 87 Hz, kui mootori nimisagedus on 50 Hz. Sagedusmuundur peab seda funktsiooni võimaldama. Kui 50 Hz puhul toidetakse mootorit pingega 230 V, siis 87 Hz puhul teguri ![]() korda suurema pingega 400 V. See on võimalik ainult sellisel mootoril, mida võib kolmnurkühenduses toita pingega 400 V. Kui mootor staatorimähistega 230 / 400 V (Δ / Y). Mähised peavad olema sellise režiimi jaoks sobivad (8).
korda suurema pingega 400 V. See on võimalik ainult sellisel mootoril, mida võib kolmnurkühenduses toita pingega 400 V. Kui mootor staatorimähistega 230 / 400 V (Δ / Y). Mähised peavad olema sellise režiimi jaoks sobivad (8).
On oluline, et mootori pinge suureneb koos sagedusega ning nimipingest 230 V suurematel pingetel on pinge ja sageduse suhe konstantne (![]() ) ning sama väärtusega kui nimipingest allpool .
) ning sama väärtusega kui nimipingest allpool .
Enamike mootorisarjade puhul toodetakse suurema (üle 4 kW) võimsusega mootoreid ka suuremale toitepingele, nt 400 / 690 V. Nende masinate puhul pole võimalik rakendada põhisageduse suurenemist kuni 87 Hz. Seepärast tuleb jälgida, et suurendatud põhisagedusega ajamites kasutataks vaid 230 / 400 V nimipingega mootoreid.
Pinge ja sageduse võrdelisel suurendmisel 50 Hz kuni 87 Hz laieneb ka mootori konstantse momendiga tööpiirkond kuni 87 Hz ning mootori võimsus suureneb seejuures nimivõimsusega võrreldes kuni ![]() korda. Pöörlemiskiiruse suurenemisel üle 87 Hz läheb ajam üle nõrgendatud väljatugevusega režiimi. Optimaalselt talitleva sagedusmuunduri korral, eriti kui töötatakse täispingel ja siinuselise vooluga, võib seda lubada ka lühiajalise ülekoormuse (short- time duty) puhul. Pöörlemiskiiruse suurenemisel paraneb ka mootori jahutus, mistõttu on püsitalitluses (S1, vt punkti 2.3.6.) lubatud võimsus kuni 35 % võrra suurem, mis tähendab, et võib kasutada väiksema suurusastmega mootorit. Näiteks lubatakse mootorile võimsusega 3 kW kolmnurklülituses püsitalitluses sageduse 87 Hz puhul võimsust 4 kW (8).
korda. Pöörlemiskiiruse suurenemisel üle 87 Hz läheb ajam üle nõrgendatud väljatugevusega režiimi. Optimaalselt talitleva sagedusmuunduri korral, eriti kui töötatakse täispingel ja siinuselise vooluga, võib seda lubada ka lühiajalise ülekoormuse (short- time duty) puhul. Pöörlemiskiiruse suurenemisel paraneb ka mootori jahutus, mistõttu on püsitalitluses (S1, vt punkti 2.3.6.) lubatud võimsus kuni 35 % võrra suurem, mis tähendab, et võib kasutada väiksema suurusastmega mootorit. Näiteks lubatakse mootorile võimsusega 3 kW kolmnurklülituses püsitalitluses sageduse 87 Hz puhul võimsust 4 kW (8).
Joonis 2.21. Elektrimootori talitlus 87 Hz režiimis
Pulsilaiusmodulatsioon
Pulsilaiusmodulatsioon (PWM – Pulse Width Modulation) ühendab endas väljundi pinge ja sageduse juhtimist ning on tänapäeval rohkesti kasutatud vaheldite juhtimiseks. Pulsilaiusmodulatsiooni väljundiks on konstantse amplituudiga elektriliste impulsside jada, kus vajaliku kujuga signaali saamiseks muudetakse impulsside kestust (laiust) konstantse perioodi korral. Kaasaegsetes muundurites ulatub pulsilaiusmodulatsiooni sagedus mõnedest kilohertsidest (1 kHz = 103 Hz) mootorite juhtimisea kuni megahertsidesse (1 MHz = 106 Hz) mõningates muundurites. Pulsi laiusega reguleeritakse mõjuva pinge efektiivväärtust (vt. Joonis 2.22).
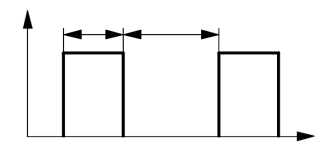
Joonis 2.22. Pulsi efektiivsus
Suhteline lülituskestus leitakse

Pinge efektiivväärtus ühe perioodi jooksul arvutatakse
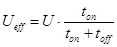
Siit järeldub, et mida pikem on lülituskestus (mida laiem on pulss), seda suurem on pinge efektiivväärtus perioodi jooksul.
Sagedusmuunduri alalisvoolu vahelüli pinge pole sageli juhitav. Pulsilaiusmodulatsiooni kasutamsel on võimalik saada transistoride lülitamise abil reguleeritavat väljundpinget. Eksisteerib mitu erinevat pulsilaiusmodulatsiooni liiki, kuna tänapäeval on kõige tihedamini kasutatav siinuseline pulsilaiusmodulatsioon, siis vaatleme seda modulatsiooni tüüpi lähemalt.
Siinuselise pulsilaiusmodulatsiooni eesmärgiks on sellise pinge formeerimine, mis oleks võimalikult lähedane ideaalse siinusega (vt. punkti 2.6.5). PWM-i genereeritakse juhtsignaalide kandevsageduse kolmnurkpinge võrdlemisel siinussignaaliga, nagu on näidatud joonisel x,a. Signaalid võrreldakse elektroonikas kasutatavas elemendis- komparaatoris. Ajahetkel, mil siinuspinge hetkväärtus on suurem, kui kolmnurksignaali hetkväärtus, on transistor avatud (transistori baasile on rakendatud pinge Us, vt punkti 2.6.1) ning sellel hetkel jookseb mootorist läbi elektrivool.
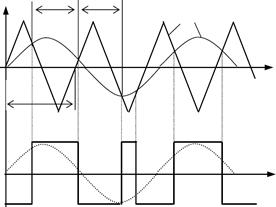
Joonis 2.23. Ühefaasilise siinuspinge genereerimine pulsilaiusmodulatsiooniga
Pulsilaiusmodulatsiooni kasutatakse kolmefaasilise vahelduvpinge tekitamiseks. Selle tarvis on ühe siinusseade signaali asemel kasutatud kolm. Mida kõrgem on kandevsignaali (kolmnurksignaali) sagedus, seda rohkem sarnaneb väljundis siinuspinge ideaalsele sinusoidile. Seadesignaali (siinussignaali) sageduse reguleerimisega reguleeritakse väljundpinge sagedus. Sellise moodusega juhitakse asünkroon- ja sünkroonmootoreid.
Pulsilaiusmodulatsiooni põhimõtet kasutatakse ka alalisvoolumootorite (vt. punkt 2.6.5) juhtimiseks. Sellisel juhul genereeritakse pulsi laiust muutes muutuva efektiivväärtusega alalispinge.
Mootori momendi vahetu juhtimine
Mootori momendi vahetu juhtimise (DTC, direct torque control) meetod juhib otseselt staatori voogu Φ ja momenti M ning ei vaja sisemisi vooluregulaatoreid ega pulsilaiusmodulatsiooni. Selle mooduse korral juhitakse vaheldi lüliteid vahetult mootori pinge ja voolu mõõtmise kvalitatiivse seaduse alusel. Staatori magnetvoog tuletatakse staatori pingest, momenti on aga magnetvoo ja mootori voolu produkt. Välja arvutatud voog ja moment võrreldakse nende etteandesuurustega ning juhul kui need erinevad lubatud tolerantsi võrra, siis vaheldi transistore juhitakse selliselt, et viia voog ja moment võimalikult kiiresti lubatud vahemikku [23].
Momendi vahetu juhtimise korral on kolmefaasilise asünkroonmootori juhtimine on avatud ahelaga juhtimine, mis sarnaneb alalisvoolu juhtimisele. Pulsilaiusmodulatsiooniga juhitavates ajamites juhitakse pinget ja sagedust, mis enne genereerimist läbivad paljusid matemaatilisi plokke kontrolleris. Kuna DTC puhul juhitakse otse mootorit momenti ja magnetvälja, mis ise sõltuvad mootori parameetritest, siis ei vaja selline süsteem lisaks pulsilaiusmodulatsiooniga töötavat modulaatorit. Lisaks sellele võimaldab selline moodus juhtida momenti ilma tagasisideanduriteta.
Üheks suureks eeliseks on võimalus juhtida mootorit väga väikestel sagedustel (alla 0,5 Hz) arendades samal ajal nimimomenti (ettevaatust mootori jahutus!). Ilma tagasisideta ajamites on pöörlemiskiiruse täpsus tavaliselt 10% mootori nimilibistusest, mis rahuldab 95 % tööstuses kasutatavate tööde nõudmisi. Momendi juhtimise puhul reageerib süsteem muutustele 1-2 ms jooksul, samas kui PWMiga juhitavate ajamite puhul on see 100 ms. Momendi juhtimisel on tagatud ka momendi lineaarsus, mis on eriti oluline täpsetes töödes, nagu paberikerimisrullides (paper winders).
Üheks piiranguks on DTC meetodi kasutamine mitme mootori paralleelsel juhtimisel. Sellisel juhul ei ole juhtseadmel infot iga üksiku mootori oleku kohta, sellisel juhul on mõistlikum kasutada sagedusjuhtimist.
Mootori koormused ja nende tunnusjooned
Selleks, et valida töömasina jaoks optimaalne mootor peab tundma erinevate koormuste karakteristikuid. Mootori sobitamisel koormusega peab jälgima, et mootori käivitusmoment oleks töömasina käivitusmomendist suurem. Samuti ei tohi töömasin põhjustada rootori seiskumist ülekoormuse tõttu.
Momendi tunnusjoone järgi jaotatakse koormused neljaks kategooriaks:
- konstantse koormusega,
- pöörlemiskiirusega võrdeliselt kasvava koormusega,
- pöörlemiskiirusega ruutsõltuvalt kasvava koormusega,
- konstantse võimsusega töövahemikus.
Loetletud koormuste näited, momendi M ja võimsuse P sõltuvused pöörlemiskiirusest n ja nende mehaanilised tunnusjooned on ära toodud Tabel 2.5.
Tabel 2.5. Erinevad koormuskarakteristikud
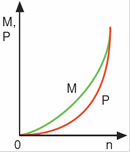
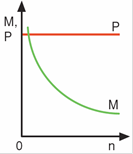
| tõstuk (hoist),konveier (conveyor),robot (robot). | valts (rolling mill),veski (mill),triikimisrull (calander). | pump (pump),ventilaator (fan),tsentrifuug (centrifuge). | puur (borer),kerija (winder),press (press). |
| M = const | M ~ n | M ~ n2 | M ~ n-1 |
| P ~ n | P ~ n2 | P ~ n3 | P = const |
 |  |  |  |
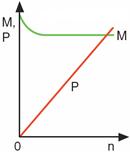 |  |  |  |
Konstantse koormuse puhul ei sõltu koormusmoment pöörlemiskiirusest (M = const). Sellisteks koormusteks on tõstemehhanismid, konveierid ja robotid, mis nõuavad kõrget lahtimurdmismomenti (moment paigalt nihutamiseks). Seepärast peab ka mootor ja mootorit juhtiv sagedusmuundur olema võimelised taluma lühiajalisi ülekoormuseid. Juhul, kui suure koormusmomendiga seadmed töötavad püsivalt madalatel kiirustel, siis tekkib oht mootori ülekuumenemiseks ning jahutamiseks tuleb kasutada välist jahutust. Kriitilise temperatuurini kuumenemist, mille puhul mähiste isolatsioon võib sulada, aitab vältida mootorisse sisseehitatud temperatuuriandur (termistor).
Lineaarselt kasvava koormusmomendiga koormusteks võivad olla valtsid, veskid, paber-pressid. Nende puhul esineb lahtimurdemoment harva ning on tavaliselt väike. Võimsus kasvab ruutvõrdeliselt pöörlemiskiirusega st. et kahekordsel nimikiirusel tarbitakse 4 korda suuremat võimsust.
Ruutvõrdeliselt kasvava koormusmomendiga on ventilaatorid, pumbad ja tsentrifuugid st seadmed, kus määravaks on õhu või vedeliku takistus. Lahtimurdemoment esineb neis väga harva ning on tavaliselt väike. Tihtipeale töötavad need seadmed kiiretel pööretel, mistõttu on tagatud hea jahutus. Võimsus muutub aga pöörlemiskiirusega kuupvõrdeliselt. Kui langetada ventilaatori pöörlemiskiirust 100 protsendilt 90 protsendile, siis väheneb tarbitav võimsus 0,93·Pn, ehk ligikaudu 70 % peale.
Konstantse võimsusega on puurid, freesid, mähkimismasinad jt. Nad töötavad konstantsel kiirusel ning moment on väike, kuna neid tavaliselt koormatakse hetkel, mil masin on saavutanud oma nimikiiruse. Moment on pöördvõrdeline pöörlemiskiirusega.
Tavaliselt esinevad praktikas segakarakteristikud ning kõrvalekalded ideaalsetest tunnus-joontest.
Sagedusmuunduri funktsioonid
Ajami käivitamine ja peatamine
Käivitusmeetodi valikul määratakse juhtimiseks kasutatavate juhtlülitite tüüp ja otstarve. Kiirendus- ja aeglustusrampide kestused töökiirusele käivitamisel ja pidurdamisel on sätestatavad laias vahemikus sekundikümnendikest kuni kümnete minutiteni. Käivituse alghetkel rakendatavat sageduse väärtust nimetatakse stardi- ehk käivitussageduseks.
Ajami peatumine võib toimuda kas vaba väljajooksu või aeglustusrambiga. Aeglustusrambi puhul aeglustatakse mootori kiirust sageduse vähendamisega kuni pidurdussageduseni ja rakendatakse seejärel dünaamilist pidurdust. Pidurdussageduseks loetakse sagedust, millest allpool rakendatakse mootori dünaamilist pidurdust. Pidurduseks kasutatava alalispinge vaikeväärtus sõltub muunduri võimsusest ja on tavaliselt sätitav vahemikus 1…20%, kusjuures muunduri suurema võimsuse puhul valitakse väiksem pinge. Samuti saab valida dünaamilise pidurduse kestuse [21].
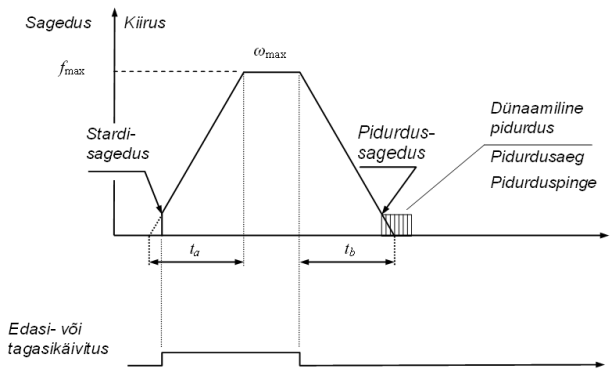 Joonis 2.24. Programmeeritavad kiirendus- ja aeglustusrampide, samuti dünaamilise pidurduse kestus Joonis 2.24. Programmeeritavad kiirendus- ja aeglustusrampide, samuti dünaamilise pidurduse kestus |
Käivitamise ja pidurdamise rambid peavad olema valitud sobivalt mootori andmetega. Näiteks ei saa valida kiiret käivitust suure inertsimomendiga mootorile, kuna sellisel juhul oleks vaja arendada ajamil väga suurt momenti ja ka võimsust. See võib põhjustada muundurisse sisseehitatud kaitsete rakendumise ja mootori seiskumise. Kui mootorit peatatakse vaba väljajooksuga, siis tuleb enne mootori taaskäivitamist oodata, kuni mootor on seisma jäänud, vastasel korral võib rakenduda sagedusmuunduri [21].
Libistuse kompensatsioon
Libistuse kompensatsioon (slip compensation) võimaldab parandada ajami dünaamilisi omadusi. Seda moodust kasutatakse suure jõudlusega asünkroonajamites, kus peamiseks eesmärgiks on kiiruse reguleerimine. Libistuse kompenseerimisel hoitakse mootori kiirus koormuse suurenemisel tema toitepinge sageduse suurendamisega konstantne (vt. punkt 2.6.2). Libistuse kompenseerimine ei anna tulemust anduriteta süsteemides. Tavaliselt valitakse kompensatsiooni vahemikuks 0…5 %. Ülekompenseerimisel tekkib oht, et mootori töö muutub ebastabiilseks [21].
 Joonis 2.25. Libistuse kompensatsiooni põhimõte Joonis 2.25. Libistuse kompensatsiooni põhimõte |
IR kompensatsioon
IR kompensatsiooni kasutatakse staatoris tekkiva aktiivpingelangu ΔU kompenseerimiseks (vt. Joonis 2.26). IR kompensatsioon aitab tagada vajaliku magnetvoo tugevuse ning sellega mootori parema käivituse. Nagu on näha, ei alustata pinge- sageduse juhtimise puhul pinget suurendama nullist, vaid teatud pinge väärtusest ΔU = IR, mida kasutaja võib sättida 0…20 % piires.
 Joonis 2.26. Staatori pingelangu (IR) kompensatsioon Joonis 2.26. Staatori pingelangu (IR) kompensatsioon |
Tabelis 6.2 on toodud firma ABB poolt soovituslikud IR kompensatsiooni väärtused 400 V pöörlevatele mootoritele kasutades sagedusmuundurit ACS400.
Tabel 2.6. Soovituslikud IR kompensatsiooni väärtused 400V pöörlevatele masinatele
| Võimsus [kW] | 3 | 7,5 | 15 | 22 | 37 |
|---|---|---|---|---|---|
| IR komp. [V] | 21 | 18 | 15 | 12 | 10 |
Mootori momendikompensatsioon
Momendikompensatsiooni puhul võib sagedusmuundur sõltuvalt koormuse tüübist valida ka erineva kujuga kiirendusrambi. Kui koormus on pöörlemiskiirusega võrdeline, siis kasutatakse lineaarset rampi, samas kui koormus on pöörlemiskiirusga ruutvõrdeline, kasutatakse parabooli kujulist rampi.
Mootori pöördemomendi automaatkompensatsiooni puhul vähendab sagedusmuundur mootori koormuse vähenemisel automaatselt tema toitepinget. Kompensatsiooni parameeterid sätitakse nimivoolu juures vahemikus 0…20 % nimipingest (tavaliselt 3…5 %). Kompensatsiooni liiga suure väärtuse puhul võib ajam minna mittestabiilseks ja rakenduda liigvoolukaitse.
 a a | 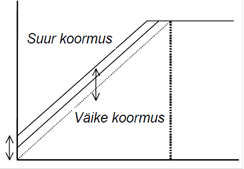 b b |
| Joonis 2.27. (a) Momendi kompensatsiooni, (b) momendi automaatkompensatsioon | |
Sujuvkäivitiga ajam
Sujuvkäiviti ja tema tööpõhimõte
Sujuvkäiviti on türistoridel töötav vahelduvpingeregulaator, mis on ette nähtud asünkroonmootorite sujuvaks käivitamiseks (väikese voolutõukega), pidurdamiseks või peatamiseks ja energiasäästu saamiseks muutlikul koormusel. Kiirendus – ja aeglustusrambid on kasutaja poolt sätitavad. Lisaks sellele võimaldavad sujuvkäivitid dünaamilist pidurdust, lühiajalist väikekiirusel pöörlemist (kuni 120 s). Raske käivitustalitluse puhul (masina seisuhõõrde ületamiseks) saab rakendada ka löökkäivitusimpulsi (kick start). Firma ABB sujuvkäiviti on näidatud Joonis 2.28.>

Joonis 2.28. Firma ABB sujuvkäiviti
Tavaliselt koosneb vahelduvpingeregulaator kahesuunalistest (nt sümistoridest) või vastuparalleelselt ühendatud pooljuhtventiilidest (nt türistoridest). Pinget muudetakse türistoride tüürnurkade α juhtimisega, millega saavutatakse pinge madalam efektiivväärtus. Sujuvkäiviti ei muuda sagedust, seega ei sobi sujuvkäiviti kiiruse reguleerimiseks. Joonis 2.29 on näha, punktiirjoonega pinge muutumist võrgus ning sellest tekkivat elektrivoolu. Kui teatud momendil, nurk alfa, lülitatakse türistor sisse, siis langeb mootorile ainult osa tervest siinuspinge poolperioodist. Tüürnurk määrab ära ka pinge ja voolukõverate vahelise nihke, sest vool tekkib ahelas ainult pinge olemasuolul.
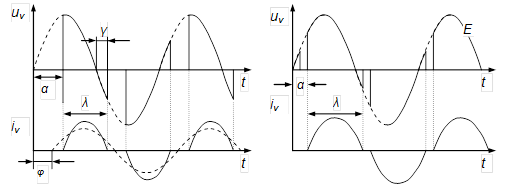 |
Joonis 2.29. Vahelduvpingeregulaatori väljundpinge ja -voolu diagrammid erinevate tüürnurkade puhul [21].
Sujuvkäivitid võivad olla kas ühe või kolmefaasilised.
Ühefaasiline vahelduvpingeregulaator (vt. Joonis 2.30) koosneb kahest vastuparalleelselt ühendatud türistorist. Pinge väärtust muudetakse türistoride avamishetke reguleerimisega faasijuhtimise põhimõttel. Suletavate pooljuhtventiilide (nt transistoride) puhul saab sujuvkäiviti juhtimiseks kasutada ka pulsilaiusmodulatsiooni põhimõtet. Ühefaasilisi vahelduvpingeregulaatoreid kasutatakse laialdaselt kodumasinate ja tööriistade, nt elektritrellide, pesumasinate, tolmuimejate jms universaalmootoritega ajamite kiiruse reguleerimiseks. Samuti kasutatakse vahelduvpingeregulaatoreid valgustuse reguleerimiseks. Vahelduvpingeregulaatorite peamiseks rakenduseks võimsates ajamites on sujuvkäivitid [21].
Kolmefaasiline vahelduvpingeregulaator (vt. Joonis 2.30) koosneb kolmest ühefaasilisest regulaatorist. Kui koormuse keskpunkt on ühendatud neutraaljuhiga N, on kolmefaasilise pingeregulaatori reguleerimiskarakteristik identne ühefaasilise vaheldupingeregulaatori omaga. Kui ühendust neutraaljuhiga pole (tihti mootoritel seda ei olegi), peavad türistorid voolu tekitamiseks sisse lülituma paarikaupa, mis halvendab tunduvalt reguleerimisomadusi. Mõningaid kolmefaasilisi vahelduvpingeregulaatoreid juhitakse ainult kahe faasi muutmisega ning kolmas ühendatakse otse võrku. Sellisel juhul tuleb tähelepanu pöörata sellele, et sujuvkäiviti ühendamisel võib primaarpoole ühendamisel ka sekundaarpool, mis ei sisalda türistore, sattuda pinge alla.
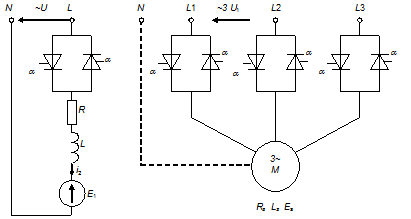 |
Joonis 2.30. Vahelduvpingeregulaatorid: (a) ühefaasiline, (b) kolmefaasiline [21].
Sujuvkäiviti ühendamine
Sujuvkäiviti ühendamiseks on kaks erinevat võimalust- In line, mis on kõige levinuim ühendamise viis, ja In Delta. Ainult mõned üksikud sujuvkävitid võimaldavad In Delta ühendamist. Vaatleme mõlemat ühendamise viisi nüüd lähemalt.
7. In Line ja In Delta
In line on kõige levinuim viis sujuvkäiviti ühendamiseks. 3 faasi on järjestikuliselt ühendatud liigkoormuskaitselülitiga, põhikontaktoriga ja teiste seadmetega. Sellise ühenduse puhul peab sujuvkäiviti olema valitud kooskõlas mootori andmetega. Näiteks vooluga 100 A töötav mootor nõuab 100 A sujuvkäivitit, 100 A kontaktorit.
In Delta ühendus võimaldab ühendada mootorit kolmnurka nii, et oleks võimalik asendada täht-kolmnurk käivitust. Kui sujuvkäiviti on ühendatud In Deltasse, siis on ta ekspluateeritud kõigest 58 % (1/√3) ulatuses oma täisvõimsusest. Sellepärast on võimalik mootorile valida väiksema võimsusega sujuvkäivitit ja ja sellega saavutada odavama lahenduse. Näiteks 100 A mootor nõuaks käivitamiseks 58 amprilist sujuvkäivitut, 58 amprilist kontaktorit. Sellise mootori ühendamisel peab olema tagatud ka kuue juhtmeline kaabel.
 a a | 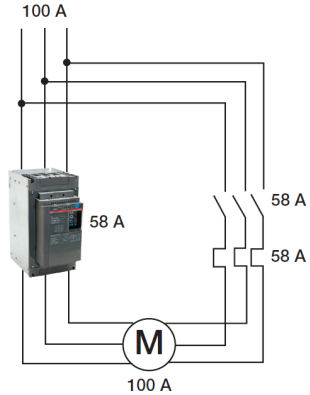 b b |
Asünkroonmootori käivitamine sujuvkäivitiga
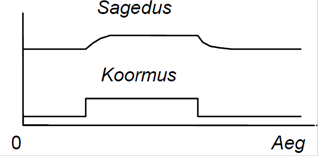
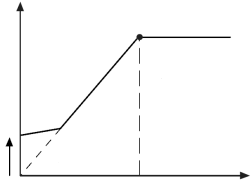
Mootori käivitamine on üks ülimalt tähtis protsess, kuna see kutsub esile mootori paigaltvõtu ja kiirendamise, mis omakorda kutsuvad esile suure momendi tekkimise ja suurema voolu tarbimist võrgust. Igat käivitusprotsessi iseloomustavad pinge voolu, või sageduse momendi diagrammid. Sujuvkäiviti puhul saab paindlikult valida sobiva käivitusrambi. Kui mootori käivitamine on raskendatud võib lahtimurdemomendi saavutamiseks rakendada ka hetkelist täispingega käivitusimpulssi. Lühisrootoriga asünkroonmootori normaalkäivitusel võib käivitusvool olla 3-4 korda suurem nimivoolust, raskel käivitusel 4-5 korda. Kui võrrelda käivitamist sujuvkäivitiga teiste käivitusviisidega nagu otsevõrkkäivitus ja täht-kolmnurkkäivitus, siis võib märgata, et sujuvkäiviti kiirendusramp on tõepoolest sujuvam (vt. Joonis 2.31). Kiirendusrambi kestus tuleb valida vastavalt koormusele, liiga suurele koormusele ei tohi määrata lühikese kestusega käivitusrampi, kuna see võib põhjustada ülekoormuskaitse rakendumise. Samuti ei saa väikesele koormusele programmeerida liiga pika kestusega käivitusrampi, kuna see võib põhjustada liigkoormuskaitse rakendumise.
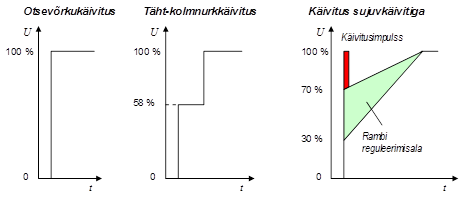
Joonis 2.31. Pinge-aja tunnusjooned erinevatel käivitusviisidel [28]
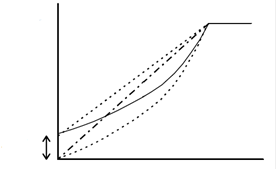
Voolu ja momendi muutumine asünkroonmootori erinevatel käivitusviisidel on näidatud Joonis 2.32. Nagu võib märgata, on sujuvkäiviti puhul käivitusvool väiksem ning moment muutud sujuvamalt.
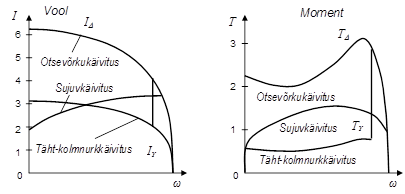
Joonis 2.32. Voolu ja momendi sõltuvused pöörlemiskiirusest erinevatel käivitusviisidel
Ühe sujuvkäivitiga võib käivitada korraga ka mitu mootorit. Joonis 2.33 on näidatud sujuvkäiviti kasutamine kahe asünkroonmootori üheaegse käivitamise lülituses. Mõlemat mootorit toidetakse ühisest toitevõrgust läbi liigvoolu vabastiga kaitselüliti ja kontaktori kontaktide ning sujuvkäiviti. Mootorite liigkoormuskaitse on realiseeritud eraldi termoreleedega. Mootorite pidurdamiseks võib kasutada mootori vaba väljajooksu, pidurdamist rambiga, alalisvoolupidurdust ja dünaamilist pidurdust (vt. punkt 2.5.7.).
| ToitevõrkLiigvooluvabastigakaitselüliti või sulavkaitsmedKontaktorSujuvkäivitiLiigkoormuskaitsetermoreleedMootorid | 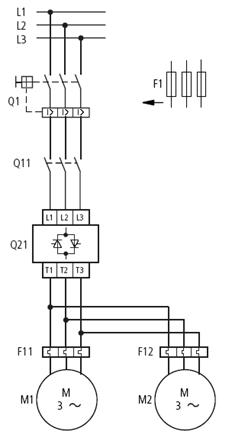 |
Sujuvkäiviti kaitsefunktsioonid
Tänapäeval täidab sujuvkäivitite juhtimissüsteem mitmeid mootori ja käivitusseadme kaitsefunktsioone. Kaitsefunktsioonid kaitsevad nii mootorit, aga ka töömasinat, mida mootor käitab. Nendeks on näiteks
- eelnevalt sätestatud maksimaalvoolupiirang,
- sisend- ja väljundfaasi katkestus,
- türistoride lühis (mõned sujuvkäivitid võivad töötada ka lühistatud türistoriga [28],
- liigkuumenemine,
- toitepinge väär sagedus,
- protsessori rike.
Mõnede sujuvkäivitite puhul lisanduvad loetletud kaitsefunktsioonidele veel voolu kaudset soojuslikku toimet ja mootori jahtumist arvestav liigkoormuskaitse, mootori liigkuumenemis- ehk termistorkaitse, seiskunud rootori, koormuse ootamatu kadumise, juhtseadme mäluvigade, pikaleveninud käivituse ja liiga kaua kestva väikekiirusel talitlusaja funktsioonid. Näiteks pumpade käivitusrambi sujuv juhtimine võimaldab vältida hüdraulilist lööki torustikes.
Sujuvkäiviti valik
Tavaliselt valitakse sujuvkäiviti mootori nimivõimsuse järgi. Mõningatel juhtudel tuleb valida suurema võimsusega saujuvkäiviti. Nendeks juhtudeks on kas rasked käivitustingimused või tihe käivitamine. [28].
Tabel 2.7 annab pisikese ülevaate sujuvkäiviti valikust [28].
Tabel 2.7. Sujuvkäiviti valikukriteeriumid
| Normaalne käivitus (normal start) | Raske käivitus (Heavy duty start) | |
|---|---|---|
| Tüüpilised rakendusalad | Kompressor, eskalaator, tsentrifugaalpump, lift. | Pikk konveier, purusti, segisti, veski |
| Valik | Sujuvkäiviti valida vastavalt mootori nimiandmetele. | Normaalse käivitusega sujuvkäiviti puhul valida üks suurus suurem sujuvkäiviti kui mootori nimivõimsus.Kui sujuvkäiviti on loodud raske käivituseks, siis valida sujuvkäiviti vastavalt mootori nimivõimsusele. |
Sujuvkäiviti rakendamise näide: tsentrifugaalventilaator
Vaatleme järgnevalt tsentrifugaalventilaatorit, mida käitab kolmefaasiline lühisroototiga asünkroonmootor (vt. Joonis 2.34).
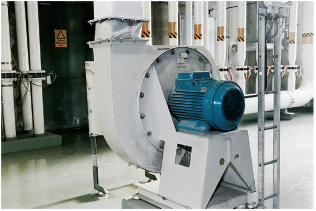
Joonis 2.34. Tsentrifugaalventilaatoriga asünkroonmootor [28]
Mõned masinad on loodud selliselt, et neid käivitatakse vähendatud käivitusmomendiga st koormusvabalt. Suuri tsentrifugaalventilaatoreid käivitatakse tihti kinnises keskkonnas, mis teeb käivituse lihtsamaks, kuid kuna ventilaatori inertsimoment on küllalt suur, siis võib käivitus kesta suhteliselt kaua.
Tsentrifugaalventilaatorid on tihti käitavad rihmadega. Otsevõrkkäivitusel kipuvad viimased aga libisema, mis on põhjustatud nende masinate suurest inertsimomendist (võrreldav hoorattaga), mida ei ole kerge paigalt nihutada. Rihmade libisemine on ebasoovitav nähtus, mis vajab suuri kulutusi hooldusele ja väljavahetamisele, samas kui tootmine seisab.
Täht-kolmnurk käivitusel on küll käivitusmoment väiksem, aga kuna ventilaatori puhul suureneb moment pöörlemiskõveraga ruutvõrdeliselt, ei saavuta mootor tähtühenduses vajalikku momenti, et mootorit piisavalt kiirendada. Ümberlülituse hetkel tekkib aga suur voolutõuge ja seega ka pinge ülekandes, mis on tihti võrreldavad otsevõrkkäivitusega. Libisevate rihmade puhul võib see aga tõsta veelgi kõrgemale. Ainus võimalus libisemise vältimiseks on rihmad rohkem pingule tõmmata.
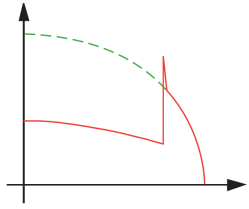
Joonis 2.35. Täht-kolmnurk käivitamisel tekkiv vooluimpulss [28]
Üheks võimalikuks viisiks vähendada käivitusmomenti on kasutada sujuvkäivitit mootori käivitamiseks. Õigesti valitud sujuvkäiviti puhul on pinge käivitamisel piisavalt madal, et vältida rihmade libisemist ja piisavalt kõrge, et ventilaator käivitada. Lisaks sellele võimaldab sujuvkäiviti käivitada masinat tühijooksul ja koormatult.
Sujuvkäiviti valikul tuleb lähtuda mootori nimiandmetest ja käivitusviisist. Normaalsel käivitusel tuleb sujuvkäiviti valida vastavalt mootori nimiandmetele, raskel käivitusel valida kas selleks ette nähtud sujuvkäiviti samade mootori parameetritega. Võib ka valida normaalse käivituse jaoks ette nähtud, aga üks klass kõrgemat, sujuvkäivitit. Soovitavad algparameetrid oleksid:
- Stardirambi kestus: 10 s.
- Pidurdusrambi kestus: 0 s (pidurdamine vaba väljajooksuga)
- Algpinge: 30 % mootori nimipingest (vt. Joonis 2.31. Pinge-aja tunnusjooned erinevatel käivitusviisidel).
- Soovitav on kasutada ka voolupiirangut.
Samm-mootoriga elektriajam
Samm-mootori ehitus ja tööpõhimõte
Samm-mootor on elektrimasin, mis muudab alalispinge impulsid mootori võlli mehaaniliseks energiaks. Samm-mootoritel on sõltuvalt ehitusviisist (bipolaarsed või unipolaarsed mootorid) 4, 6 või 8 ühendusklemmi, ehitusviisilt on nad on sünkroonmootorid, mille rootor pöörleb vastavalt staatorimähisesse antud taktimpulssidele ja mille pöördenurk on määratud läbitud sammude arvuga.
Kuna samm-mootor on numbriliselt juhitav, siis sobib ta ideaalselt kokku diskreetsete juhtimissüsteemidega, näiteks mikroprotsessoriga. Igale impulsile vastab teatud pöördenurk α, n impulsile aga pöördenurk γ= n·α . Siit järeldub, et samm-mootorit võib kasutada positsioneerimisel avatud juhtimisahelaga, st tagasisideta süsteemides. Samm-mootori eeliseks on asjaolu, et puudub tagasisideanduri vajadus ajami positsioneerimisel. Positsioneerimistäpsuse suurendamiseks konstrueeritakse mootorid suurema pooluste arvuga. Kuna samm-mootorit juhitakse järjestikuste impulssidega, siis võib madalatel pööretel olla samm-mootori liikumine katkendlik.
Samm-mootorid on rentaablid võimsuseni kuni ~1 kW, neid toodetakse ka lineaarmootorite kujul.
Samm-mootori ühe takti samm ehk sammunurk α

kus Nph on pooluste arv faasi kohta, m faaside arv ning Z hammaste arv.
Samm-mootor koos taktgeneraatori ja lõppastmega moodustab samm-ajami (Joonis 2.36). Taktsignaalid moodustatakse töö etteandesuuruste (kiirus, asend, kiirendus) alusel ja nendega tüüritakse transistorlülititest koosnevat lõppastet. Transistorlülitite ülesanne on samm-mootori mähiste kommuteerimine ettenähtud liikumistrajektoori tagamiseks.
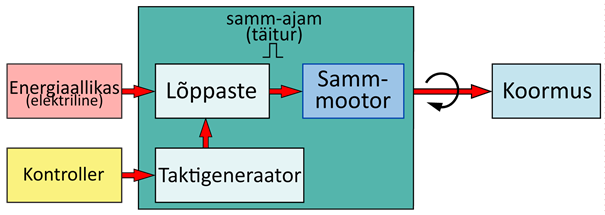
Joonis2.36. Samm-ajami struktuurskeem
Samm-mootorite tüübid
Samm-mootorid jaotatakse vastavalt ehitusviisile reluktants- (reaktiivrootoriga) ja püsimagnet- (aktiivrootoriga) mootoriteks, võimalik on ka kombineeritud konstruktsioon. Reluktants-samm-mootori rootor koosneb monoliitsest hammastega elektrotehnilisest terasest südamikust; staatorivoolu väljalülitamisel kaob ka jääkmagnetism. Seetõttu saab peale mootori pingestamist magnetvoog liikuda takistamatult läbi südamiku. Reluktantsmootori rootor hakkab liikuma väiksema magnetilise takistuse suunas, st väikseima õhupiluni järgmise hamba ja mähise vahel.
Püsimagnet-samm-mootorite (Joonis 2.37a) staator koosneb elektrotehnilisest terasest ja rootor vahelduvate poolustega püsimagnetitest. Rootor pannakse pöörlema staatoris tekitatava magnetvälja abil.
Kuna reluktants-samm-mootoritel (Joonis 2.37b) puuduvad püsimagnetid, ei eksisteeri neil vooluvabas olekus ka takistusmomenti. Püsimagnet-samm-mootorite pooluste arv ja seega ka positsioneerimistäpsus on piiratud. Hübriid-samm-mootoris (Joonis 2.37c) on esindatud mõlema ehitusviisi omadused, tema rootoril on nii püsimagnetid kui hammasvöö.
Suuremomendilisteks mootoriteks nimetatakse samm-mootoreid, mille rootorite valmistamisel on kasutatud eriti tugevaid haruldastest muldmetallidest püsimagneteid. Sellised magnetid tekitavad tavalisest suuremaid väljatihedusi.
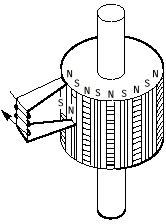 | 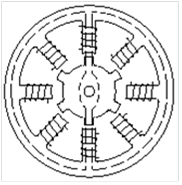 | 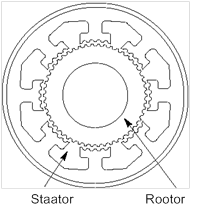 |
| a) aktiivrootoriga | b) reaktiivrootoriga | c) hübriidrootoriga |
joonis 2.37. Samm-mootorite tüübid [25]
Samm-mootorite tööpõhimõte
5 või 6 ühendusjuhtmega ja keskväljavõttega unipolaarsed samm-mootorid ühendatakse reeglina (Joonis 2.38a) toodud skeemi järgi. Keskväljavõte ühendatakse tavaliselt toite plussklemmiga ja kummagi mähise otsasid kommuteeritakse soovitud pöörlemissuuna saavutamiseks vaheldumisi toite miinusklemmiga. Näidatud mootori sammunurk on 30°. mähis 1 on jaotatud üla- ja alapooluse ning mähis 2 vasaku ja parema pooluse vahel. Aktiivrootoril on kokku 6 vahelduvat, ümbermõõdule jaotatud poolust. Kommuteerides toite mähiselt 1 ümber mähisele 2, liigub rootor 30° ehk ühe sammu võrra. Pidev liikumine saavutatakse mähiste 1 ja 2 järjestikuste ümberlülitustega.
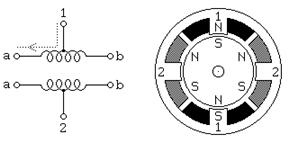 | 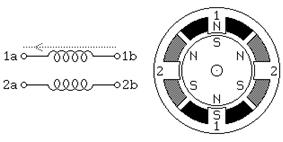 |
| a) unipolaarne | b) bipolaarne |
Joonis 2.38. Samm-mootorite ühendusviisid [25]
Bipolaarsete mootorite ehitus (Joonis 2.38b) sarnaneb unipolaarsete mootorite omaga, erinevus seisneb keskväljavõtete puudumises. Seega on mootor lihtsama konstruktsiooniga, kuid lõppastme topoloogia vahelduva polaarsuse tõttu keerukam. Jättes mähised ümber lülitamata, säilitab pingestatud aktiiv- või hübriidrootoriga samm-mootor hoidemomendi, mis väldib rootori iseeneslikku liikumahakkamist väliste jõudude toimel.
Samm-mootori juhtimine
Lihtsaim samm-mootori juhtimisviis on ühefaasiline talitlus, mille puhul pingestatakse ainult ühte mähist korraga. Meetodi puuduseks on saavutatava momendi väiksus, rootori võimalikud asendid on nt kahefaasilise kahe hambaga mootori korral 0°, 90°, 180° ja 270°. Mõlema mähise samaaegsel pingestamisel hakkab mootor tööle kahefaasilises täissammtalitluses (Joonis 2.39a) ja saavutab suurema pöördemomendi. Asendid jäävad täpselt ühefaasilise talitluse positsiooninurkade vahele, olles vastavalt 45°, 135°, 225° ja 315°. Mõlema talitlusviisi kombineerimisel, st ühe või mõlema mähise vahelduval pingestamisel on võimalik saavutada juba 8 asendit, sellist talitlusviisi nimetakse poolsammtalitluseks (Joonis 2.39b).
Toites samm-mootori mõlemat mähist vastavalt siinus-koosinussignaaliga, on tulemuseks ideaaliähedane pöördmagnetväli ja sellest lähtuvalt ka pöördliikumine. Mootori efektiivsus kasvab koos sammude arvuga pöörde kohta: energiatarve ühtlustub, väheneb sammukao oht ning mootor töötab tunduvalt sujuvamalt.
Toites samm-mootori mähiseid siinus-koosinus seaduspärasuse järgi diskreetsete impulssidega, on tulemuseks nn mikrosammtalitlus. Taolise talitlusviisi eeliseks on liikumise suurem sujuvus, kuid puuduseks vähenenud täpsus, mis eeldab tagasisideahelate kasutamist.
| a) | 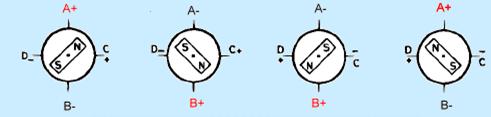 |
| b) | 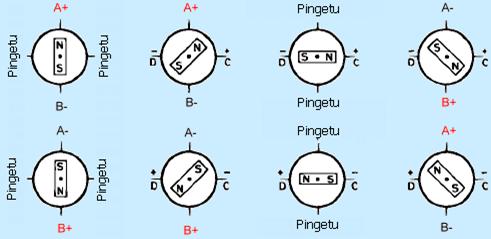 |
Joonis 2.39. Rootori võimalikud asendid täis- (a) ja poolsammtalitluses (b) [25]
Samm-ajam peab läbitud nurga arvestust loendatud impulsside järgi, saades asendi juurdekasvu ehk inkremendi. Absoluutasendi määramiseks tuleb esmalt loendur nullida algpositsiooni määratlemisega, selleks kasutatakse reeglina piirlüliteid.
Samm-ajami juhtimisosa koosneb mikrokontrolleril põhinevast taktgeneraatorist ja lõppastmest (Joonis 2.40). 4 mähiseotsa pingestamisteks peab mikrokontroller väljastama 4-kohalise bitijada. Iga bitijadaga pöördub rootor ühe sammu võrra, pidev pöörlemine on realiseeritav tarkvaraliselt programmitsükliga, kus antakse ette sammude arv. Samm-mootori suureks eeliseks on asjaolu, et tema asend on piisavalt suure täpsusega määratav. Teades nt ratta ümbermõõtu, võib välja arvutada suuruse samm/cm, ehk 1cm läbimiseks vajamineva sammude hulga. Sellest lähtuvalt võib koostada töö alamprogrammi, mis kasutab sisendsuurusena teepikkust, arvutab sellest sammude hulga ja edastab selle portide kaudu tsüklina lõppastmele (joon 2.40).
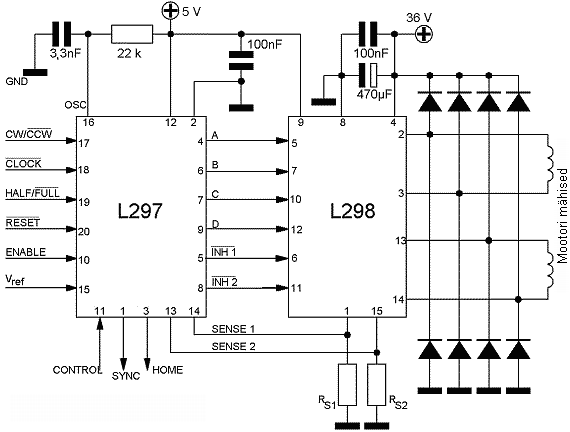
Joonis 2.40. Samm-ajami lõppastme skeeminäidis [25]
Lõppastme sisendklemmid võib ühendada otse mikrokontrolleri väljundporti või arvuti paralleelporti:
| Tähis | Selgitus |
|---|---|
| CW/CCW | Annab ette mootori pöörlemissuuna (CW = ClockWise = kellaosuti liikumise suund, CCW = CounterClockWise = kellaosuti liikumisele vastu). |
| Clock | Lühikese impulsi andmisel liigub mootor ühe sammu võrra. Juhtimistsüklis pingestatakse ainult seda klemmi. |
| Half/Full | Vaikimisi on see klemm maandatud. Andes talle pinge +5V, hakkab mootor tööle poolsammtalitluses, st pöörde kohta tuleb kaks korda rohkem samme. |
| Enable | Selle klemmi maandamisel lülitub mootori toitepinge välja. |
| Vref | Pingega Vref (0…3 V) määratakse mootori suurim vool. |
| RESET | Lähtestab samm-mootori. Mootori töötamiseks peab tal pidevalt olema +5 V pinge. |
| Control | Lõiketalitluse viisi muutmiseks. Aktiivse sisendi puhul kahaneb vool aeglaselt (faasilõige), kiireks vähendamiseks eemaldatakse tüürpinge. |
| Sync, Home | Need klemmid jäävad tavaliselt ühendamata. |
Nagu selgub, on samm-mootori käitamiseks soovitud suunas ja soovitud kiirusega vaja ainult 3 pordi klemmi.
Samm-mootori koormamine
Samm-mootori poolt arendatav moment sõltub lülitussagedusest ja järelikult ka mootori pöörlemiskiirusest. Mootorid arendavad tüübisildil näidatud nimimomenti ainult väga madalatel kiirustel. Pöörlemiskiiruse suurenemisel arendatav moment väheneb, mis teatud kiiruse puhul võib ajami viia vääratustalitlusse, mida iseloomustab sünkronismist väljalangemine ehk sammukadu. Taolise momendikarakteristiku põhjuseks on mähiste induktiivsus. Mähiste pidevate ümberlülitamiste tõttu tekitavad induktiivsused vastuelektromotoorjõu, mistõttu suurtel kiirustel pole enam võimalik saavutada nimivoolu ega -momenti. Tänapäevaseid samm-mootoreid toidetakse enamasti reguleeritavatest vooluallikatest, mis tagavad püsiva voolu ja momendi suuremas kiiruspiirkonnas. Voolu hoidmisel konstantsena võib nt 12V nimipingega samm-mootori klemmipinge tõusta isegi 30V…40V lähedale.
Samm-mootori koormamisel tuleb kinni pidada teatud piirangutest (Joonis 2.41).
1. Hoidemoment Th on väärtus, milleni saab seisvat, staatiliselt pingestatud mootorit koormata, ilma et tema rootor veel ei pöörduks.
2. Käivitus-peatumissagedus fs on suurim sammusagedus, mille juures koormamata samm-mootor käivitub sünkronismist välja langemata.
3. Mootori kiirus on piiratud suurima tühijooksusagedusega fmax.
4. Mootori kiirendus- ja pidurduspiirkond, kus puudub sünkronismist väljalangemise oht, on piiratud vastava kõveraga. Samuti on kõveraga piiratud püsitalitluspiirkond.
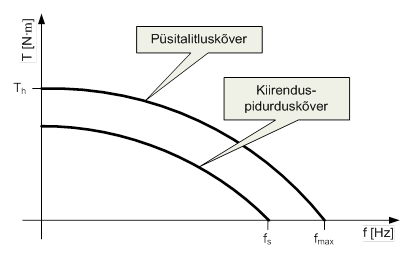
Joonis 2.41. Samm-mootori kiiruse-momendi tunnusjoon [25]
Arvutusülesanne
Hübriidrootoriga samm-mootori staator koosneb kahest poolusest ja rootor 100-st hambast.
1. Kui suur on selle mootori samm täissammtalitluses?
2. Kui suur peab olema taktsagedus, et mootor pöörleks kiirusega n = 500min-1?
Lahendus:
Samm-mootori sammunurk ![]()
Vajalik taktsagedus ![]()
Samm-mootori kasutamise näide
Tööstusroboti haaratsit juhitakse sammootoriga. Kogu süsteemi tunnusjoon on näidatud (Joonis 2.42). Avatud haaratsi maksimaalne laius on 60mm. Haaratava objekti laius on 35mm. Mitu impulssi tuleb mootorile anda, et sulgeda see objekt haaratsi vahele jõuga 6N, kui haarats on algpositsioonis 53mm?
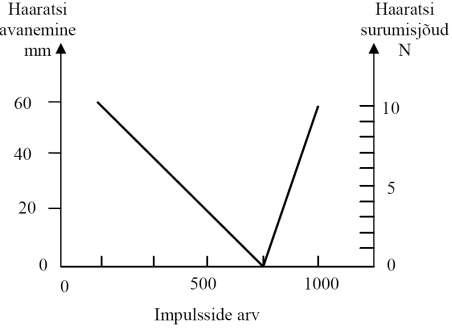
Joonis 2.42. Tööstusroboti haaratsi tunnusjoon [25]
Lahendus:
Nagu jooniselt näha, lõikab graafik x-telge impulsside arvu 750 juures ning maksimaalse jõu 10N saavutab haarats 1000 impulsi korral. Et avatud haarats laiusega 60mm haaraks 35mm laia objekti läheb vaja ![]()
Saavutamaks haaramisjõudu 6N läheb vaja ![]()
Impulsside koguarv ![]() .
.
Servoajamid
Servoajami ehitus ja tööpõhimõte
Servoajam koosneb servomootorist ja servovõimendist (Joonis 2.43 ja Joonis 2.44). Servovõimendi (ka servokontrolleri või servomuunduri) peamine ülesanne on mootori toitevoolude reguleerimine. Sõna „servo” tuleneb ladinakeelsest sõnast „servus”, mis tähendab teenijat, orja või abimeest. Tööpinkides on servoajamid kasutusel peamiselt abiajamitena. 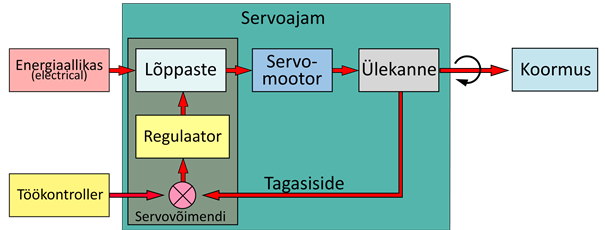
Joonis 2.43. Servoajami struktuurskeem 
Joonis 2.44. Servovõimendid ja -mootorid
Servovõimendi ehk servomuundur reguleerib etteantud momendi ja kiiruse saavutamiseks mootori mähistesse antavat voolu. Servovõimendi koosneb põhiosadena lõppastmest ja regulaatorist.
Regulaator tüürib lõppastet ja tagab etteande- ja tegelike suuruste (vool, asend, kiirus) pideva võrdlemisega mootori täpse töö ka muutuva koormuse tingimustes.
Lõppaste kujutab endast jõuelektroonikal põhinevat modulaatorit, mis formeerib servomootori toitevoolud tagamaks täituri ettenähtud liikumistrajektoori.
Erinevalt tavalistest elektriajamitest, mis töötavad enamasti püsikiirusel, on servoajami talitlus reeglina ebaühtlane. Nimikiiruseni kiirendamine kestab tihti ainult mõne millisekundi, millele järgneb lühikese aja pärast sama kiire pidurdus; seejuures peab positsioneerimistäpsus olema sajandikmillimeetri suurusjärgus.
Servoajamitele esitatakse paljudel juhtudel alljärgnevalt loetletud nõudeid:
1) suur positsioonimistäpsus;
2) suur kiiruse reguleerimistäpsus;
3) suur reguleerimispiirkond;
4) momendi stabiilsus;
5) küllaldane ülekoormatavus;
6) suur toimekiirus.
Servoajami eelised ülejäänud reguleeritavate ajamite ees on head dünaamilised näitajad, suur täpsus ja nullkiirusmoment (suur moment nullilähedastel kiirusel) ning kompaktne ehitusviis suure erivõimsuse juures. Ajami dünaamiliste omaduste all mõistetakse tema toimekiirust, mille suurenemisel kasvab ka töömasinate kiirus, töötsüklite arv ja lõpptulemusena masinate tootlikkus.
Ajami nõutav täpsus on sageli määratud töömasinaga, mille käitamiseks ajamit kasutatakse. Moodne suure toimekiirusega ajam peab rahuldama erinevate töömasinate omadustega määratletud nõudeid.
Servoajamid on suure täpsuse ja toimekiirusega ning laias kiirusvahemikus töötavad ajamisüsteemid, mis täidavad oma funktsioone ka ajutiste ülekoormuste puhul.
Servoajamite mootorid
Servomootorid on elektrimootorid, mille konstrueerimisel on prioriteediks võetud dünaamika, st kiire käivitus ja pidurdus. Servomootoreid valmistatakse nii vahelduvvoolule (sünkroon- ja asünkroonmootorid) kui ka alalisvoolule (harjadega ja harjavabad).
Püsimagnetergutusega sünkroonmootor rahuldab tänapäeval kõige paremini servoajami mootoritele esitatavaid nõudeid. Suur erivõimsus saavutatakse püsimagnetite nagu neodüüm-raud-boor (NdFeB), samaarium-koobalt (SmCo) ja ferriitmaterjalide kasutamisega. Vähesemal määral esineb ka asünkroon-servomootoreid. Servomootoriga komplektis tarnitakse ka asendiandur, mis edastab regulaatorile asendi- ja kiiruseteavet (Joonis 2.45). Mootoriga ühisesse korpusesse võib olla integreeritud ka mehaaniline pidur, mis väldib võlli nihkumist väliste jõudude toimel toite puudumisel.
Püsimagnetergutusega sünkroonmootoriga on konstruktsioonilt sarnane, kuid juhtimisviisilt erinev harjavaba ehk elektronkommutaatoriga alalisvoolumootor. 
Joonis 2.45. Tüüpilise servomootori välisvaade
Sünkroonmootorid
Sünkroonmootorid on mitmefaasilised mootorid, milles staatori ja rootori magnetväljad pöörlevad sünkroonselt. Pöörlev magnetväli tekitatakse staatorimähiste sobiva ruumilise paigutusega ning nende voolude ajalise järgnevusega. Magnetvälja pöörlemiskiirus nd arvutatakse valemiga ![]() ,
,
kus f on toitepinge sagedus ja p staatori pooluspaaride arv.
Sünkroonmootori, nagu ka asünkroonmootori staator koosneb kerest, lamineeritud magnetahelast ja staatorimähisest. Rootor koosneb võllist, lamineeritud magnetahelast ning selle külge kinnitatud püsimagnetitest. Dünaamiliste omaduste parandamiseks on mootori magnetahel perforeeritud. Sellega vähendatakse rootori inertsimomenti ning suurendatakse vastavalt mootori toimekiirust käivitamisel.
Kui sünkroonmootorit toidetakse pingega, mille sagedus on konstantne, siis on tema rootori pöörlemiskiirus võrdne magnetvälja pöörlemiskiirusega. Mootori koormamisel hilistub rootori pöördväli staatori pöördvälja suhtes ning rootori poolused on staatori pöördvälja pooluste suhtes teatud koormusnurga a all. Mida suurem on rootori hilistumine staatori suhtes, seda suurem on mootori poolt arendatav moment. Kui nurk on 90°, siis on rootori poolused kahe staatori pooluse vahel ning mootori poolt arendatav moment on maksimaalne. Rootori magnetvälja edasise hilistumise korral, st kui mootor on liigkoormatud, hakkab mootori moment uuesti vähenema ning mootor on mittestabiilses talitluses, st mootor võib vääratuda ja jääda seisma (Joonis 2.46). 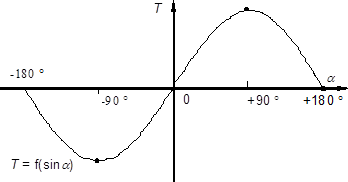
Joonis 2.46. Konstantse sagedusega toitepingega sünkroonmootori mehaaniline ehk momendi-nurga tunnusjoon
Servomootori kiiruse-momendi tunnusjoontel on näha kolm erinevat piirangut, mida ajami projekteerimisel tuleb arvestada (Joonis 2.47).
1. Mootori maksimaalne moment on peale muude suuruste piiratud ka püsimagnetite magnetvooga. Kui mootor on tugevasti koormatud ning staatori vool suureneb üle lubatud piiri, siis magnetid demagnetiseeruvad ning mootoris tekib momendikadu. Mootori ja toitemuunduri õige valiku korral pole vaja demagnetiseerumist karta.
2. Mootori moment on suurematel kiirustel piiratud mootori maksimaalse klemmipingega. Klemmipinge sõltub omakorda lõppastme pingest ja pingelangust kaablis. Pöörlemisel tekkiva vastuelektromotoorjõu (mootoris indutseeritud pinge) tõttu ei saa mootor suuremal kiirusel arendada suuremat momenti. Seepärast, kiiruse suurenemisel vastuelektromotoorjõud suureneb, mootori vool ja moment aga vähenevad.
3. Mootori moment on piiratud ka soojusliku koormusega. Ajami keskmine koormusmoment arvutatakse välja selle projekteerimisel. Arvutuslik moment peab olema väiksem kui masina poolt nullkiirusel arendatav moment T0. Lubatud soojusliku koormuse (temperatuuri) piirväärtuse ületamine põhjustab magnetahela demagnetiseerumist või mähiste isolatsioonirikkeid. 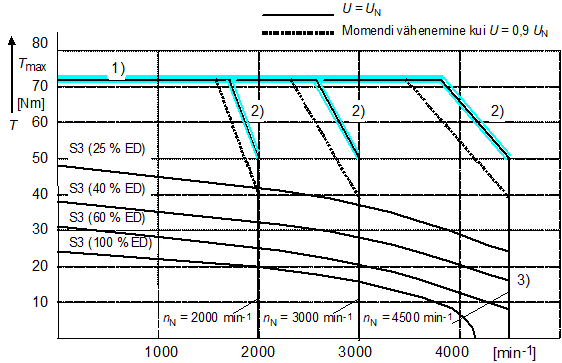
Joonis 2.47. Sünkroon-servomootori tüüpilised mehaanilised tunnusjooned [25]
Harjavabad alalisvoolumootorid
Harjavaba alalisvoolumootor sarnaneb konstruktsioonilt püsimagnetergutusega sünkroonmootorile. Staatorimähised on analoogsed mitmefaasilise vahelduvoolumasina omadega ja rootor koosneb ühest või mitmest püsimagnet-pooluspaarist. Erinevalt harjadega masinast ei hoita koormusnurka 90° juures mitte mehaanilise kommutaatori, vaid lõppastme pooljuhtlülitite täpse kommuteerimisega. Lõppastme lülitite õigeks kommuteerimiseks on vaja teada rootori asendit, mis määratakse kas Halli elemendi või optiliste andurite abil. Elektrooniline kommutaator on osaks servovõimendi lõppastmest. (Joonis 2.48)
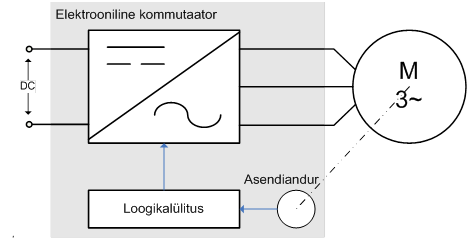
Joonis 2.48. Harjavaba alalisvoolumootor=püsimagnetergutusega sünkroonmootor + elektrooniline kommutaator [25]
Servoajamite juhtimine ja tagasiside
Servovõimendid
Servovõimendi (teised nimetused ka servokontroller või servomuundur) reguleerib etteantud liikumisparameetrite (moment, asend) väärtuste saavutamiseks mootori mähistesse antavat voolu.
Kompaktsete servovõimendite (Joonis 2.49) eeliseks on nende väikesed mõõtmed ja mass ning terviklik ehitus. Nende puhul pole vaja teha lisaühendusi üksikute komponentide vahel nagu moodulehitusega kontrollerite puhul.
Moodulehitusega numbrilistel servovõimenditel on üks toitemoodul ja mitu koordinaat-servomoodulit (Joonis 2.49). Nende eelised avalduvad mitmekoordinaadiliste servoajamite puhul. Sel juhul toidetakse mitut koordinaat-servomoodulit ühisest toitemoodulist. Toitemooduli võimsus määratakse üksikute koordinaat-servomoodulite summaarse võimsuse ja nende kasutusteguri järgi. Taolise moodulehitusega servoajami koosseisu võivad kuuluda ka pidurdus- ja energiatagastusahelad. Mitmekoordinaadilise servoajami eeliseks on ka see, et ühisel alalisvoolulülil paiknedes võib pidurdustalitluses toimiv koordinaatmoodul suunata vabanenud energia mootoritalitluses moodulisse, säästes sellega võrgust tarbitavat energiat.
Servoajam saab oma seadesuurused täituri talitlust vahetult juhtivast töö juhtimisprogrammist. Viimane võib olla laaditud ka servovõimendi sisemällu. Servoajami seadesuurused kujutavad endast täituri liikumise ajadiagrammi, st asendi, kiiruse ja mõnel juhul ka momendi muutumist ajas. Liikumistrajektoor allub mitmesugustele riistvaralistele piirangutele, mistõttu tuleb see enne ajamisse etteandmist n-ö konditsioneerida. Näiteks täituri asend ei tohi ületada teatud piirasendeid, samuti on konstruktsiooniliselt piiratud mootori maksimumkiirus ja -kiirendus (Joonis 2.50).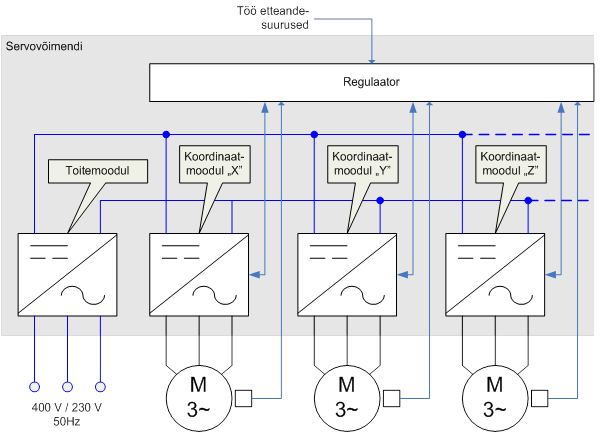
Joonis 2.49. Moodulitest koosnev kolmekoordinaadiline servovõimendi [25]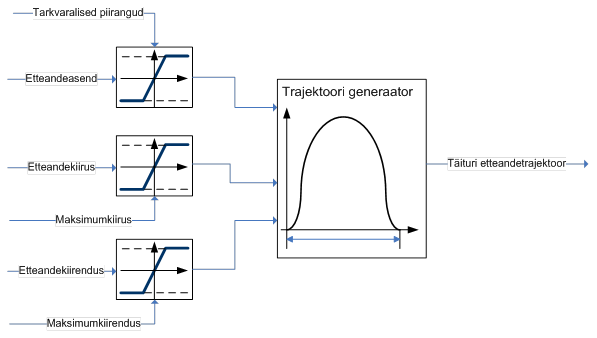
Joonis 2.50. Servo-täiturajami etteandetrajektoori genereerimine [25]
Tagasiside
Servomootorid komplekteeritakse standardselt resolveritega, mis määravad võlli absoluutasendi ühe pöörde ehk 360° ulatuses. Numbriliste servovõimenditega ühilduvad ka sincos-andurid (ühe- või mitmepöördelised absoluutväärtuse andurid) ja inkrementaalandurid ehk enkoodrid, mis tagavad eriti suure täpsuse ja dünaamika.
Resolver töötab pöördtrafo (Joonis 2.51), mille moodustavad rootoril ja staatoril paiknevad mähised, põhimõttel. Staatori kaks mähist on teineteise suhtes 90° võrra nihutatud ja nende siinuselisi väljundpingeid ud ja uq kasutatakse rootori kiiruse ning asendi juurdekasvusignaali määramiseks. Kontaktivabaks signaaliedastuseks on resolveri staatoril ja rootoril on ka lisamähised.
Ehitus
Valemid
Signaalid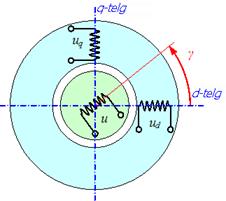
![]()
![]()
![]()
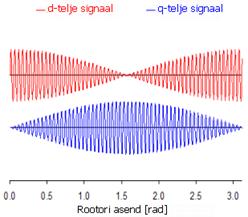
Joonis 2.51. Resolveri tööpõhimõte
Inkrementaalanduri nelja väljundkanali signaale Joonis 2.52) kasutatakse ajamite täpseks positsioneerimiseks. Väljunditeks on signaalid A ja B ning inverteeritud signaalid A ja B. Inkrementaalandur ehk enkooder väljastab kindla arvu impulsse ühe pöörde kohta, kusjuures signaalid A ja B on ajas 90° võrra nihutatud. Mootor pöörleb päripäeva, kui A kanali impulsside positiivsed frondid (esifrondid) edestavad B kanali impulsside esifronte ning vastupidi. Kuna inkrementaalandurid ei tuvasta mitte võlli absoluutasendit, vaid selle juurdekasvu, siis absoluutasendi määramiseks on vaja esmalt määratleda baaspunkt, millest algab liikumise arvutamine. Baaspunktiks võib olla ka eraldi koodirajal paiknev indeks. 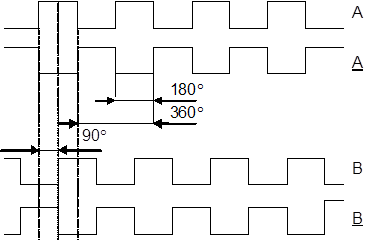
Joonis 2.52. Inkrementaalanduri signaalid [25]
Inkrementaalandur koosneb valgusallikast ja läbipaistmatust koodikettast, millesse on perforeeritud koodirada. Fototajur püüab kinni läbi perforatsiooni tunginud valguse ja väljastab siinuseliselt muutuva signaali, mis muundatakse nelinurkimpulsside jadaks (Joonis 2.53) kiirus on määratud enkoodri väljundimpulsside sagedusega (Joonis 2.54). 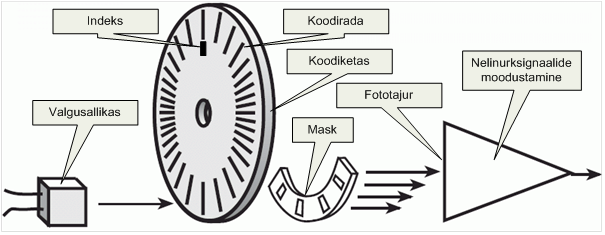
Joonis 2.53. Inkrementaalanduri (enkoodri) ehitus [25]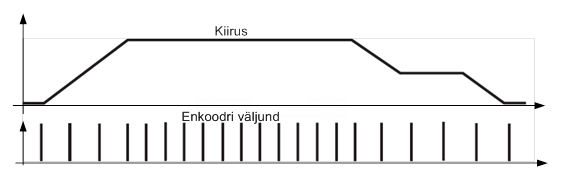
Joonis 2.54. Kiiruse ja enkoodri väljundsignaali vaheline seos [25]
Servoajamite rakendamise näited
Positsioneerimine on servoajami klassikaline ülesanne. Sekundi murdosa jooksul peab ajam saavutama nimikiiruse ja lühikese aja möödudes sama kiiresti pidurdama, et jõuda sajandikmillimeetri täpsusega etteantud positsioonile.
Kiiruse reguleerimisega tagatakse ajami ühtlane töö. Kiirendus ja pidurdus antakse ette vastavate kõverate ehk rampidega. Juhtarvuti alamprogrammid võimaldavad kasutada tootmisprotsessi käigus mitut kiirusekõverat vastavalt protsessi etapile.
Spindli positsioneerimiseks tuleb mootor hetkeks peatada ja viia telg tööriista või tooriku vahetamiseks ettenähtud asendisse.
Telgede sünkroniseerimine on vajalik rakendustes, kus ühe koordinaadi liikumine sõltub teisest.
Elektrooniline ekstsentrik leiab kasutust muutuva ülekandeteguriga mehhanismides, asendades varem kasutatud mehaanilist lahendust peavõllil paikneva ekstsentriku ja järgiva teljega.
Lendsaag on funktsioon, mida kasutatakse liikuva materjali (nt konveieril) töötlemisel: lõikamisel, trükkimisel, keevitamisel jne. Töötlemise käigus peab järgiv telg toorikuga kaasa liikuma ja peale töötlust naasma lähteasendisse.
Momendi juhtimine toimub läbi täpse ja dünaamilise voolu reguleerimise. Servoajam on suuteline arendama maksimaalset momenti ka väikestel kiirustel, mistõttu kasutatakse teda mähkimismasinates ja presside käitamisel.
Solenoidid (Solenoid)
Elektromagnet on magnetiliik, milles magnetväli tekitatakse elektrivoolu poolt. Voolu kadumisel kaob ka magnetväli. Briti elektriinsener William Sturgeon leiutas elektromagneti aastal 1825. Esimene elektromagnet oli hobuserauakujuline rauatükk, mille ümber oli mitu keerdu lõdvalt keritud mähis.
Kui mähist läbis elektrivool, elektromagnet magnetiseerus ning voolu lõppedes elektromagnet demagnetiseerus. Sturgeon demonstreeris selle jõudu, tõstes üles üheksa naela seitsme untsise rauatükiga, mille ümber olid mähitud traadid, millesse lasti üheelemendilise patarei vool (Joonis 3.1).
Kõige lihtsam elektromagneti tüüp on keerdu keritud traadijupp. Mähist, mis moodustab sirge toru kuju (sarnaselt korgitõmbajale), nimetatakse solenoidiks. Palju tugevama magnetvälja saab tekitada siis, kui mähise sisse asetatakse paramagnetilisest või ferromagnetilisest materjalist (tavaliselt pehmest rauast) „südamik“. Südamik kontsentreerib magnetvälja, mis võib seejärel olla palju tugevam kui mähise enese väli.

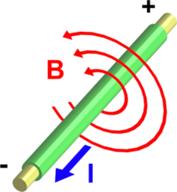
Joonis 3.1. Strugeoni solenoid
Solenoid on seade, kus muundatakse elektrienergia mehaaniliseks energiaks. Liikumise järgi võib solenoide liigitada lineaarliikumisega ja pöördliikumisega solenoidideks.
Solenoidid on tavaliselt integreeritud seadmed, mis täidavad klappide. klambrite, lülitite, riivide, lukkude ja pressseadmete funktsioone. Solenoide kasutatakse automaatikaseadmetes kus on vaja sooritada lühikese teekonnaga liikumist:
- Lineaarselt 1 mm kuni 100mm
- Pöördliikumised alla 95 °
- Solenoidide kasutamise plussid:
- Suur kiirus (lineaarliikumine 2 mm või pöördliikumine 45 ° alla 10 ms)
- Suur töötsüklite arv üle 10 miljoni tsükli
- Konstruktsiooni lihtsus
- Lihtne valmistada vastavalt tellija soovidele
Solenoidide klassifikatsioon
Lineaarliikumisega solenoidid jagunevad:
Ühesuunalised lineaarliikumisega solenoidid (solenoidmähisest arendatav jõud mõjub ühes suunas, tagasi liikumine toimub mehaaniliselt, näiteks vedru abil).
Kahesuunalised lineaarliikumisega solenoidid (liikumine toimub kahes suunas, kasutatakse kahte erinevat mähist).
Bistabiilsed või lukustusfunktsiooniga.lineaarliikumisega solenoidid (liikumine saavutatakse elektrilise impulsi abil, liikumissuund määratakse polaarsusega ja lõpu positsioonid säilitatakse püsimagnetitega ühes otsas)
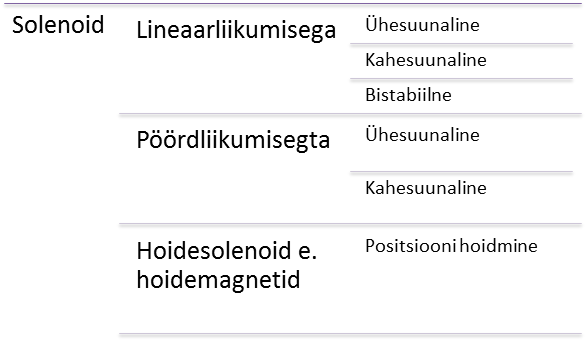
Lineaarliikumisega solenoidid
3.3.1. Ühesuunalised lineaarliikumisega solenoidid
Lineaarliikumisega solenoidil (Joonis 3.2) on kolm tähtsat tunnust: käigupikkus, jõud ja töötsükkel.
Käigupikkus on kaugus kuhu solenoidi südamik liigub.
Jõudu võib defineerida liikumise alguses liikumises, lõppedes või kogu liikumise jooksul. Jõud on alguses väiksem kui liikumise lõpus.
Töötsükkel on väljendatud protsendina (Näitab kui suure osa moodustab sisselülitamisaeg kogu tsükli ajast.)
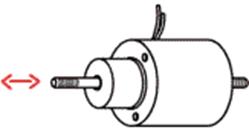
Joonis 3.2. Ühesuunalised lineaarliikumisega solenoid [44]
3.3.2. Kahe suunalised lineaarliikumisega solenoidid
Kahe suunalised lineaarliikumisega solenoidid (Joonis 3.3)
Kahesuunalised lineaarliikumisega solenoidid puhul kasutatakse tavaliselt kahte erineva polaarsusega mähist.
Joonis 3.3. Kahe suunalised lineaarliikumisega solenoid [44]
3.3.3. Bistabiilsed solenoid
Bistabiilsel solenoidil on kaks stabiilset positsiooni, solenoidmähise konstruktsioonis on püsimagnetid, mis võimaldavad südamikul kindla positsiooni säilitada ka pärast elektriimpulssi. Perspektiivis on bistabiilsel solenoidil kaks stabiilset seisundit. Esiteks- kui solenoidile on elektriliselt rakendatud ja südamik on täielikult väljas ja teiseks – kui solenoid on ilma vooluta ning südamik fikseeritakse püsimagnetitega (Joonis 3.4)
Joonis 3.4. Bistabiilne lineaarliikumisega solenoid [44]
Pöördliikumisega solenoidid
Põhiliselt kasutatakse kahte tüüpi pöördliikumisega solenoide:
Ühesuunalise pöördliikumisega solenoidid (solenoidmähisest arendatav jõud on ühesuunaline ja tagastust toimub mehaaniliselt, kõige sagedamini vedruga).
Kahesuunalise pöördliikumisega solenoidid (kasutatakse kahte pooli, – kiirendust muudetakse keerdude arvuga)
Joonis 3.5. Pöördliikumisega solenoid [44]
Ühesuunalise pöördsolenoide maksimaalne pöördenurk on reeglina 95 ° ja kahesuunalise pöördsolenoidi pöördenurgad ei ületa 45 °. Automaatikas kasutatakse suhteliselt arva ka suurema pöördenurgaga pöördsolenoide.
Hoidesolenoidid ehk hoidemagnetid
Hoidesolenoidid ehk hoidemagnetid on ilma liikuva südamikuta elektromagnetid, mis omavad suurt hoidejõudu (alates 250 kg hoidejõuga magneteid kasutatakse uste sulgemiseks … üle 700 kg hoidejõuga magneteid kasutatakse turvalukkudes)

Joonis 3.6. Hoidesolenoid
PNEUMAATILISED JUHTIMISKOMONENDID JA TÄITURID
Pneumaatilised juhtimiskomponentide klassifikatsioon
Pneumaatiliste täiturite rakendamiseks on vajalikud juhtimiskomponendid, millede ülesandeks on vajalike juhtimissignaalide tekitamine, täiturite liikumiskiiruse, suruõhu rõhu reguleerimine ja muude juhtimisoperatsioonide täitmine pneumosüsteemides. Juhtimiskomponendid on (Joonis 4.1):
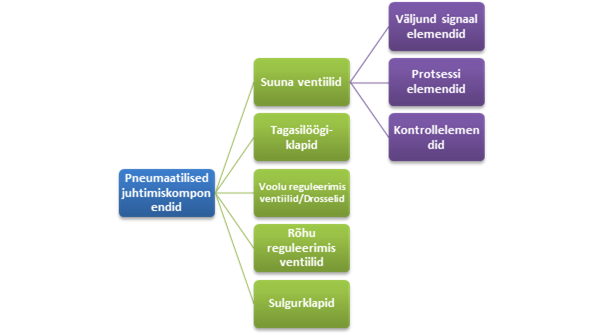
Joonis 4.1. Pneumaatilised juhtimiskomponendid
Pneumojaotid
Pneumojaotid on pneumokomponendid, mille abil muudetakse suruõhu liikumisteekonda pneumotorustikes.
Pneumoskeemides kujutatakse pneumojaoteid tingmärkidena, milles ei kajastu pnumojaoti ehitus, vaid ainult nende poolt täidetav funktsioon.
Nullasendiks nimetatakse (nt. vedruga tagastuval pneumojaotil) seda asendit, milles paiknevad pneumojaoti liikuvad osad, kui pneumojaoti ei ole rakendunud olekus. Lähteasendiks nimetatakse asendit, millisesse liiguvad pneumojaoti liikuvad osad, kui pneumoskeem, millesse ta on lülitatud, ühendatakse pneumovõrku ja millest algab pneumoseadme töötsükkel.


Pneumaatiline lõpulüliti Kangiga juhitav pneumojaoti Trossiga juhitav pneumojaoti


Rullikuga juhitav pneumojaoti Elektriliselt juhitav pneumojaoti
Joonis 4.2. Pneumojaotite näited
Pneumojaotite tingmärgid
Pneumoskeemides kujutatakse pneumojaoteid tingmärkidena, milles ei kajastu pnumojaoti ehitus, vaid ainult nende poolt täidetav funktsioon. Pneumojaotite tingmärgid vastavad standardile DIN ISO 1219 [31]
Nullasendiks nimetatakse (nt. vedruga tagastuval pneumojaotil) seda asendit, milles paiknevad pneumojaoti liikuvad osad, kui pneumojaoti ei ole rakendunud olekus.
Lähteasendiks nimetatakse asendit, millisesse liiguvad pneumojaoti liikuvad osad, kui pneumoskeem, millesse ta on lülitatud, ühendatakse pneumovõrku ja millest algab pneumoseadme töötsükkel.
Liiteid kujutatakse lähtasendist
Pneumojaoti sisemisi liiteid kujutatakse punktiga kanalite ühenduskohas
| Pneumojaoti tööasendit kujutatakse ruutudena |  |
| Ruutude arv määrab ara pneumojaoti tööasendite arvu |  |
| Pneumojaoti sisemised ühendused kujutatakse õhu voolusuunda osutavate nooltega |  |
| Suletud avasid tähistatakse risti joonega |  |
| Liiteid kujutatakse null või lähtasendis |  |
Pneumojaoti tähistuses näitab esimene number pneumojaoti avade arvu (väljaarvatud juhtimisavad) ja teine number pneumojaoti tööasendite arvu.
Näide: 3/2 pneumojaoti 3 ava 2 asendit 4/3 pneumojaoti 4 ava 3 asendit (Joonis 4.3, Joonis 4.4)
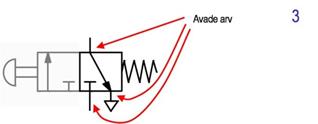
Joonis 4.3. Pneumojaoti avade arv: Avade arv 3
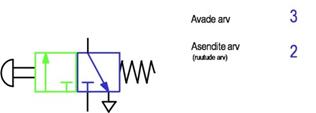
Joonis 4.4. Pneumojaoti asendite arv: Avade arv 3; Asendite arv 2
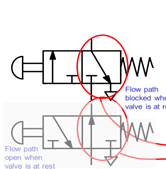

Joonis 4.5. Algasend
Selleks, et määratleda pneumojaoti avasid, kasutatakse järgnevaid avade tähistussüsteeme DIN ISO 5599-3 (Joonis 4.6):
| Tähed | Ava nimetus | Numbrid | ||
|---|---|---|---|---|
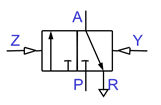 | P | Toide | 1 | 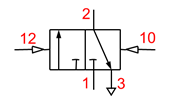 |
| A,B,C | Tööväljund | 2,4,6 | ||
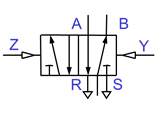 | R,S,T | Tühjenemine | 3,5,7 | 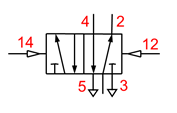 |
| X,Y,Z | Juhtava | 10,12,14 | ||
Joonis 4.6. Avade tähistus
Pneumojaotite juhtimismeetodid
Juhtimisviisi poolest eristatakse:
Pideva juhtimisega. Pneumojaoti on rakendunud asendis nii kaua kuni kestab juhttoime: kas manuaalne, pedaaliga, mehaaniline, pneumaatiline, elektriline (lülitus lähteasendisse toimub kas manuaalselt või vedruga). Neid pneumojaoteid nimetatakse ka monostabiilseteks.
Impulssjuhtimisega. Pneumojaoti viimiseks uude asendisse mõjutatakse jaotit juhtsignaaliga suhteliselt lühikese aja vältel (impulsiga). Peale juhtsignaali lõppemist jääb jaoti uude asendisse. Pneumojaoti muudab oma asendit alles uue juhtimissignaali toimel. Neid pneumojaoteid nimetatakse ka bistabiilseteks.
Pneumojaotite juhtimiseks kasutatakse järgnevaid tingmarke mis vastavad standardile DIN ISO 1219:
Manuaalne
Üldtähis ![]()
Surunupp ![]()
Lukustav hoob ![]()
Pedaal ![]()
Mehaaniline
Tagastusvedru ![]()
Keskele viiv vedru ![]()
Rulllik ![]()
Ühesuunaline rullik ![]()
Pneumaatiline
Otsene juhtimine ![]()
Kaudne juhtimine ![]()
Elektriline
Ühe mähisega ![]()
Kahe mähisega ![]()
Kombineeritud
Kahe mähisega, kaudne juhtimine ![]() võimendusega (käsijuhtimise võimalus)
võimendusega (käsijuhtimise võimalus)
Pneumojaotites kasutatakse väga erinevaid juhtimismeetodeid: mehaaniline, pneumaatiline, elektromagnetiga või kombineeritud (kasutatakse erinevaid meetodeid nt. juhtimine pneumaatiliselt ja mehaaniliselt).
Kasutaja vaatevinklist on oluline eristada vahetut juhtimist ja võimendusega juhtimist (vt. Pneumojaotite juhtimist kajastavad tingmärgid).
Vahetu juhtimise korral kantakse juhttoime pneumojaoti klappidele või siibritele üle vahetult. Antud juhtimise puuduseks on see, et suuremate pneumojaotite juhtimiseks vajalik juhtimisenergia peab olema suhteliselt suur (jõud nuppude või tõukurite liigutamiseks, elektromagneti võimsus jne). Samal ajal on aga plussiks see, et nad on tundetud tüüritava õhu rõhu suhtes.
Võimendusega juhtimise korral juhitakse nn abijaotit, mille kaudu omakorda toimub pneumojaoti juhtimine
Pneumojaotite näited
4/2 – pneumojaoti, ümberlülitav ![]()
3/2 – pneumojaoti normaalasendis avatud ![]()
4/3 – pneumojaoti keskasendis tühjenev ![]()
2/2 – pneumojaoti normaalasendis suletud ![]()
5/3 – pneumojaoti keskasendis avatud ![]()
Pneumoskeemi kujutamine
Pneumaatika protsessi skeem joonestatakse kindlate reeglite järgi (Joonis 4.7):
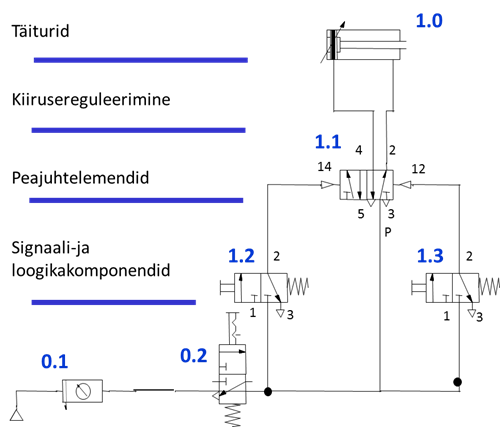
Joonis 4.7. Pneumoskeemi kujutamine
Pneumokomponentide numeratsioon on järgmine:
Grupp 1,2,3… – individuaalsed kontrollahelad (silindrite kaupa)
Grupp 0 – energiajaotuselemendid
Seerianumbrid:
.0 – tööorgan
.1 – peajuhtelement
.2,.4,.6,…(paarisnr.)- kõik elemendid, mis avaldavad mõju (+) liikumisele
.3,.5,.7,…(paaritud) – kõik elemendid, mis avaldavad mõju (-) liikumisele
.01,.02,… – kõik elemendid, mis on juht-ja tööelemendi vahel (drosselid)
Pneumojaotite ehitus (Klappjaotid; Siiberjaotid)
Pneumojaotite konstruktsioone; Klappjaotid; Siiberjaotid
Pneumojaoti konstruktsioon määrab ära pneumojaoti tööea, tema juhtimise, liidete konstruktsiooni ja mõõtmed. Kuigi pneumojaotite konstruktsioon areneb pidevalt on praegu laiemalt kasutusel järgmist tüüpi pneumojaotid.
Klappjaotid:
- kuulklapiga,
- plaatklapiga.
Siiberjaotid:
- kolviga,
- plaadiga,
- pöördsiibriga jaotid.
Klappjaotid
Antud pneumojaotites toimub õhu liikumissuuna muutmine avatava ja suletava kuulklapi või plaadi toimel. Klapi tihendamine toimub üldjuhul elastsete tihendite kasutamisega. Seda tüüpi pneumojaotites on suhteliselt vähe liikuvaid detaile, tänu millele on nende tööiga pikk, ning nad on suhteliselt tundetud mehaanilistele lisanditele suruõhus. (Joonis 4.8; Joonis 4.9; Joonis 4.10)
Juhtimiseks vajalik jõud on suhteliselt suur, kuna pneumojaoti asendi muutmiseks tuleb ületada sisseehitatud vedru ja juhitava õhuvoolu rõhust tingitud jõud. [31]
Kuulklapiga pneumojaotid on oma ehituselt lihtsad, väiksemõõtmelised ja seetõttu ka odavad.
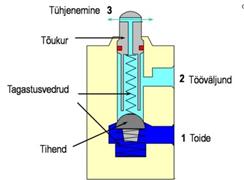
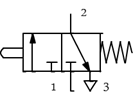
Joonis 4.8. Mehaaniliselt juhitav 3/2 klappjaoti
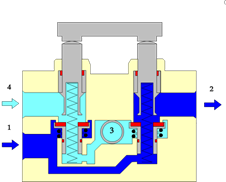
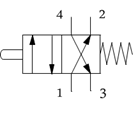
Joonis 4.9. Mehaaniliselt juhitav 4/2 taldrikklappjaoti
Klappjaotid on kindla tihedusega ja tolerantsed mustuse suhtes.


Joonis 4.10. Klappjaotid
Siiberjaotid
Võrreldes klappjaotitega iseloomustab siiberjaoteid suurem läbivool, kuid samal ajal on neil suurem ümberlülitumise aeg. Samuti ei ole nad nii hea tihendusega kui klappjaotid. Antud pneumojaotites on kasutusel liuguvad tihendid. Selleks, et vähendada tihendite kulumisest põhjustatud suruõhu leket, kasutatakse nendes pneumojaotites ühelt poolt õhuvoolu juhtimist siibriga, kuid tihenduses kasutatakse klappjaotite juures kasutatavaid konstruktsioonipõhimõtteid (Joonis 4.11; Joonis 4.12). [31]
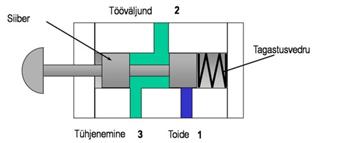
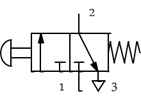
Joonis 4.11. Mehaaniliselt juhitav 3/2 siiberjaoti
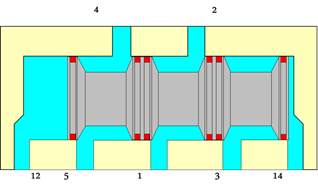
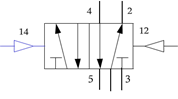
Joonis 4.12. Pneumaatiliselt juhitav 5/2 siiberjaoti
Siiberjaotid on kasutusel suurtel voolukiirustel või kui on vaja kasutada väikest jõudu
Bi- ja monostabiilne pneumojaoti. Kahepoolse toimega e. bistabiilne jaoti. Juhtsignaal muudab jaoti seisundit. Signaali katkestamisel jaoti säilitab seisundi (Joonis 4.13). Ühepoolse toimega e. monostabiilne jaoti. Juhtsignaal muudab jaoti seisundit. Signaali katkestamisel jaoti tagastub normaalseisundisse (Joonis 4.14).
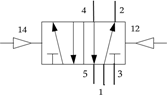
Joonis 4.13. Kahepoolse toimega e. bistabiilne jaoti.
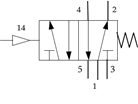
Joonis 4.14. Ühepoolse toimega e. monostabiilne jaoti.
4.1.7. Pneumojaotite vooluväärtused
Rõhukadu ja õhu voolukiirus on kasutaja jaoks tähtsad näitajad. Pneumojaoti valik sõltub:
- silindri mahust ja kiirusest
- nõutavast lülitussagedusest
- lubatavast rõhulangusest
Pneumojaotitel on määratud nominaalne voolukiirus. Vooluväärtuste arvutamisel tuleb arvestada mitmete teguritega. Need tegurid on:
- p1 rõhk jaoti sisendis (kPa või bar)
- p2 rõhk jaoti väljundis (kPa või bar)
- Δp diferentsiaalrõhk ehk rõhkude vahe (p1 – p2) (kPa või bar)
- T1 temperatuur (K)
- qn nominaalne voolukiirus (l/min)
Mõõtmise ajal liigub õhk ühesuunaliselt läbi pneumojaoti. Mõõdetakse sisend- ja väljundrõhku ning õhuvoolukiirust.
Pneumojaoti voolu nominaalväärtuste kohta leiab andmeid tootja tootekataloogist. [31]
Pneumojaotite paigaldamine ja töökindel toimimine
Lisaks pneumojaoti hoolikale valimisele on heade lülitusomaduste, stabiilse töö ning lihtsa juurdepääsu ning hooldamise tagamiseks väga oluline ka selle õige paigaldus. See kehtib nii juht – kui jõulülitusteks mõeldud jaotitele. Hooldus ja parandusoperatsioone lihtsustab oluliselt:
- komponentide süstemaatiline nummerdamine
- kirjeldavate siltide kasutusele võtmine
- sisukas ja kõikehõlmav dokumentatsioon
Käsijuhitavatele sisendsignaalideks mõeldud pneumojaotid paigaldatakse enamasti kontrollpaneelile või –lauale. Sellest tulenevalt on mugav ja otstarbekas kasutada jaoteid, mida saab kombineerida erinevate nuppude ja hoobadega. Erinevateks sisendfunktsioonideks on saadaval lai valik baasjaotiga kombineeritavaid elemente. Kontrollelementidena toimivad pneumojaotid juhivad pneumaatiliste jõuelementide tööd. Nende ehitus peab tagama täiturite kiire reageerimise antud signaalile. Jõuelemendina toimiv pneumojaoti peab seega olema täiturile nii lähedal, kui võimalik, et voolikute pikkusest tulenevad viited hoida nii lühikesed, kui võimalik. Ideaalis peaks pneumojaoti olema täiturisse sisseehitatud. Selle täiendav eelis oleks lihtsam ja kiirem paigaldus ning see, et kulub vähem ühenduskomponente.
Juhtahela töökindel toimimine on tugevas sõltuvuses lõpulülititena kasutatavate pneumojaotite õige paigaldusega Nende paigaldamisel tuleb silmas pidada edaspidise seadistamise võimalikkust ja lihtsust, et tagada nende õigeaegne lülitumine olenevalt silindri liikumisest. [31]
4.1.9. Elektromagnetiga juhitavad pneumojaotid (Elektromagnetid ja nende kommuteerimine)
Pneumojaotites kasutatakse vahetut juhtimist ja võimendusega juhtimist. Võimendusega juhtimise korral juhitakse solenoidi kaudu abijaotit, mille kaudu omakorda toimub pneumojaoti juhtimine (Joonis 4.15)

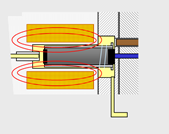
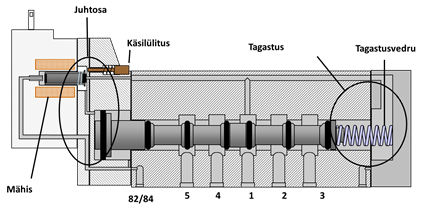
Joonis 4.15. Võimendusega 5/2 elektriliselt juhitav monostabiilne pneumojaoti [31]
Kahe sisendiga ilma tagastusvedruta pneumojaoti nimetatakse impulssjaotiks ehk bistabiilseks pneumojaotiks. (Joonis 4.16)
Kui aktiveerida elektromagnet Y1, siis käiguventiili südamik muudab oma positsiooni ja avaneb käiguventiili õhukanal 1.4. Selle käiguventiili südamik jääb sellisesse asendisse seni, kuni antakse juhtsignaal elektromagnetile Y2. Ainult siis lülitub käiguventiil ümber ja avaneb õhukanal 1.2.
Tagastusvedru puudumise tõttu on sellel ventiilil tekkinud uued omadused:
- Jaoti ümberlülitamiseks piisab lühiajalisest signaalist – impulsist
- Kuna südamik jääb peale ümberlülitamist muutumatusse asendisse, siis võib rääkida, et sellel elemendil on viimase signaali mälu
- Juhtsignaali olemasolul mõlemalt poolt pneumojaoti südamik ei muuda oma asendit.
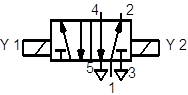
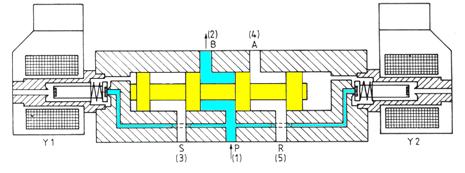
Joonis 4.16. Elektromagnetiga bistabiilse impulssjaoti ehitus ja sümbol [31]
Seadme juhtimisel tekib mõnikord ebasoovitav situatsioon kui impulssjaotile mõjuvad korraga kaks signaali vastusuunas. Sellisel juhul pneumojaoti ei soorita nõutavat ümberlülitamist. Ebasoovitavat juhtsignaali nimetatakse vastusignaaliks. Tema kõrvaldamiseks kasutatakse erinevaid lahendusi.
Pneumaatilised täiturid (silindrid, mootorid)
Pneumaatilises täituris toimub pneumaatilise energia muundamine ja edastamine valmistustööks kasutatava masina mehhaanilise liikumise energiaks (füüsikaliseks tööks), mille tulemusena võib muutuda valmiva toote ja valmistusseadmete sisu või vorm. Pneumaatilised täiturid jagunevad linear- ja pöördliikumisega täituriteks. (Joonis 4.17)
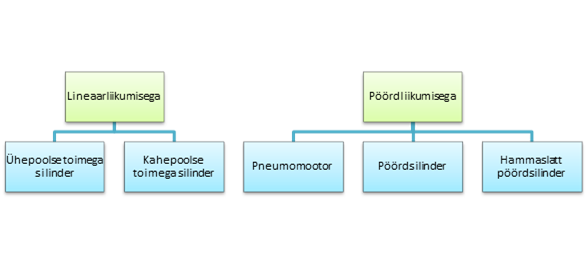
Joonis 4.17. Pneumaatiliste täiturite liigitus.
Lineaarliikumisega pneumotäiturid
Lineaarliikumisega täiturid (pneumosilindrid) Kasutatakse lineaarliikumise saamiseks mehaanilistes süsteemides.
Ühepoolse toimega silinder
Ühepoolse toimega silindri puhul juhitakse suruõhku ainult ühele poole kolbi. Sellised silindrid on kasutusel juhtudel, kui on tarvis sooritada tööliikumist ainult ühes suunas. Kolvi tagasiliikumine toimub silindrisse sisseehitatud vedru mõjul. (Joonis 4.18)
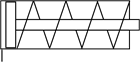
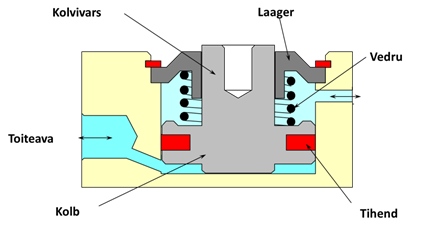
Joonis 4.18. Ühepoolse silindri tööpõhimõte ja tingmärk.
Tagastusvedru jõud on arvestatud selliselt, et tagada piisavalt kiire kolvi tagasiliikumine. Ühepoolse toimega silindritel on kolvi liikumisulatus piiratud tagastusvedru pikkusega ja ei ole üldjuhul suurem kui 100 mm. Seda tüüpi silindreid kasutatakse lukustamiseks, kinnitamiseks, kokkusurumiseks, tõukamiseks, tõstmiseks, detailide etteandmiseks, jne.
Kasutusel on kahte tüüpi ühepoolse toimega silindreid:
tööliikumine toimub suruõhu mõjul, kolvi tagasiviimine lähteasendisse toimub aga vedru mõjul
tööliikumine toimub vedru mõjul, kolvi tagasiviimine lähteasendisse toimub aga suruõhu mõjul Selliseid silindreid kasutatakse siis, kui on olemas suruõhu kadumise oht (autode- ja rongide suruõhuga töötavad pidurid).
Ühepoolse toimega silindrite konstruktsiooniline eritüüp on membraansilindrid. Membraansilindrites asendab kolbi kas kummi-, plastik- või terasmembraan. Kolvivars on kinnitatud membraani keskele. Sellistes silindrites puudub hõõrdejõud, tekib ainult membraani deformatsioonist tekkiv elastsusjõud
Kahepoolse toimega silindrid
Kolvi liikumine silindris toimub suruõhuga mõlemas suunas, nii miinus- kui ka plusssuunas. Kahepoolse toimega silindrid on kasutusel juhul kui on vajalik sooritada kasulikku tööd mõlemas suunas. Kolvi liikumisulatus on kahetoimelisel silindril praktiliselt piiramatu, kuid see peab olema selline, et silinder säilitaks jäikuse (Joonis 4.19).
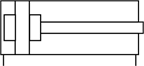
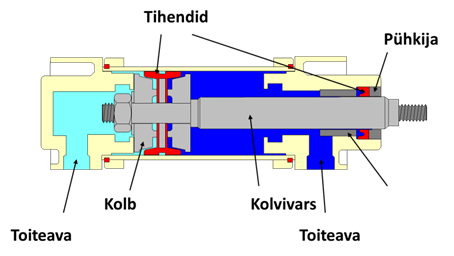
Joonis 4.19. Kahepoolse silindri tööpõhimõte tingmärk. [31]
Silindri amortisaatorid
Kui silindrit kasutatakse suurte masside liigutamiseks, siis kasutatakse löökide ja purunemiste vältimiseks silindrisse sisseehitatud amortisaatoreid. Kui kolb on jõudnud piirasendi lähedale, sulgeb amortisaatori kolb väljavoolavale õhule otseväljavoolu ning õhk pääseb välja läbi drosseli. Seetõttu liigub kolb piirasendisse aeglustusega. Enamikel juhtudel on aeglustus reguleeritav. Silindri teisesuunalisel liikumisel pääseb õhk kolvi taha otse läbi möödavooluklapi (Joonis 4.20; )
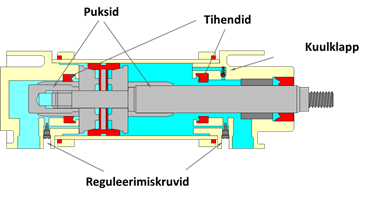
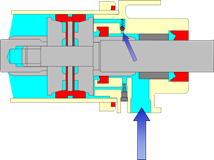
Joonis 4.20. Kahepoolse toimega amortisaatoritega silindri tööpõhimõte tingmärk.

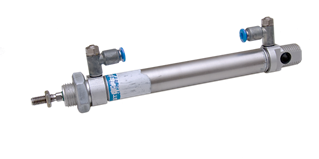
Joonis 4.21. Kahepoolse toimega silinder.
Kolvivarreta silindrid
Traditsiooniline kahepoolse toimega silinder vajab ruumi korpuse jaoks ja pluss ruumi töökäiguks (Joonis 4.22).

Ruumi on võimalik efektiivsemalt ära kasutada kolvivarreta silindriga

Kasutusel on kolvivarreta silindrid, kus kolb ja liugur on omavahel mehaaniliselt seotud, silindri ja kolvi vaheline tihendamine toimub erikonstruktsiooniga tihendi abil
Joonis 4.22. Kolvivarreta silindri tööpõhimõte. [31]
Kolvivarreta silindri ehitus
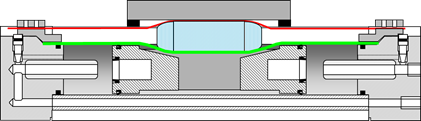
Joonis 4.23. Kolvivarreta silindri ehitus.
Joonis 4.24. Juhikutega kolvivarreta silinder.
Kolvivarreta silinder
Läbimõõt 8 mm … 80 mm
Käigupikkus 100 mm … 3000 mm
Jõud 3,000 N
Magnetilise ülekandega silinder
Kolvivarreta silindrites kasutatakse kolvi ja tööorgani sidumiseks ka magnetvälja, mis tekitatakse kasutades püsimagneteid (Joonis 4.25; Joonis 4.26)
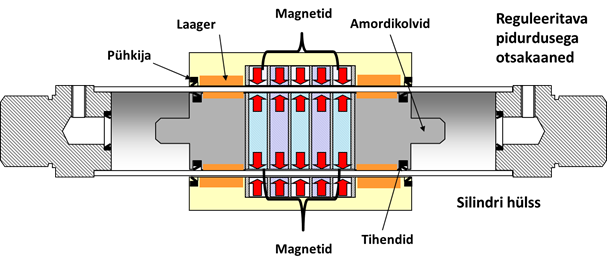
Joonis 4.25. Magnetilise ülekandega silindri ehitus.

Joonis 4.26. Magnetilise ülekandega silinder.
Neid silindreid kasutatakse juhtudel, kui vajatakse konstruktsiooni väikesi mõõtmeid nt. uste avamismehhanismides Kolvivarreta silindrid võimaldavad realiseerida pikki liikumisi, säästes samaaegselt ruumi.
Magnetilise ülekandega silindrid
Läbimõõt 12 mm … 40 mm
Käigupikkus 10 mm … 4000 mm
Jõud 750N, magneti hoidejõud kuni 1050N
Pöördliikumisega täiturid
Pöördsilindrid
Labaga pöördsilindris asendab kolbi laba, mille pöörlemissuund sõltub sellest, kummale poole laba suruõhku juhitakse. Standardsed pöördenurgad on 45°, 90°, 180°, 270°. Pöördenurka saab reguleerida ka reguleerimiskruvide abil (Joonis 4.27Joonis 4.28.)

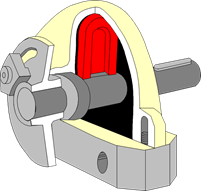
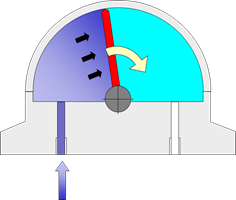
Joonis 4.27. Pöördsilindri ehitus.
Jõud kantakse üle pöördemomendina.
Moment = Jõud x Õlg
Ühikuks njuutonmeeter – Nm

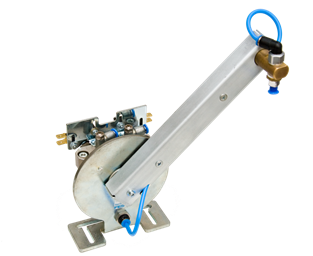
Joonis 4.28. Pöördsilinder.
Ekvivalentläbimõõt 6 mm … 40 mm
Pöördenurk 0 … 270o
Pöördemoment … 20 Nm
Hammaslatt konstruktsiooniga pöördsilinder
Antud kahepoolse toimega silindri kasutatakse pöörleva liikumise saamiseks hammaslatte. Standardsed pöördenurgad on 45°, 90°, 180°, 270°, 720°. Pöördenurka saab reguleerida ka reguleerimiskruvide abil (Joonis 4.29Joonis 4.30).
Silindri pöördemoment sõltub kasutatavast töörõhust, kolvi pindalast ja ülekandesuhtest.
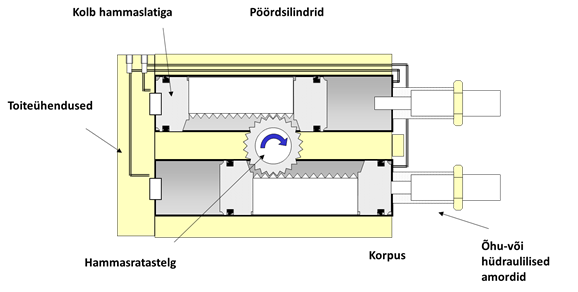
Joonis 4.29. Hammaslatt pöördsilindri ehitus [31]
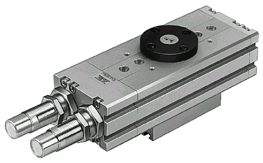
Joonis 4.30. Hammaslatt pöördsilinder.
Läbimõõt 6mm … 50mm
Pöördenurk 0 …720o
Pöördemoment …78Nm
Pneumosilindrite karakteristikud jõudude määramine
Pneumosilindri poolt arendatav jõud sõltub töörõhust, kolvi läbimõõdust ja tihendite poolt põhjustatud hõõrdejõust.
Pneumosilindri poolt arendatava teoreetilise jõu suuruse saab leida kasutades valemit:
Fth = A • p
Fth – silindri poolt arendatav teoreetiline jõud (N)
A – kolvi pindala (m2)
p – kasutatav töörõhk (Pa)
Praktikas arvestatakse silindri poolt arendatavat tegelikku jõudu, mille leidmisel võetakse arvesse ka hõõrdejõudu. Normaaltingimustes (töörõhk 400-800 kPa) arvestatakse hõõrdejõu väärtuseks ligikaudu 3-20% silindri poolt arendatavast teoreetilisest jõust.
Ühepoolse toimega silindri tegelik arendatav jõud:
Feff = (A • p) – (FR + FF)
Kahepoolse toimega silindri tegelik arendatav jõud kolvivarre väljaliikumisel (plusssuunalisel liikumisel):
Feff = (A • p) – FR
Kolvivarre sisseliikumisel (miinussuunalisel liikumisel):
Feff = (A’ • p) – FR
Feff – silindri poolt arendatav jõud (N)
A – kolvi pindala π×D2/4 (m2)
![]() A’ – kolvi kolvivarrepoolne pindala (D2-d2)×π/4 (m2)
A’ – kolvi kolvivarrepoolne pindala (D2-d2)×π/4 (m2)
.p – töörõhk (Pa)
FR – hõõrdejõud 3-20% Fth (N)
FF – vedru jõud (N)
D – kolvi läbimõõt (m)
D – kolvivarre läbimõõt (m)
Kolvi poolt arendatava jõu leidmiseks on sobilik kasutada ka nomogrammi (Joonis 4.31).
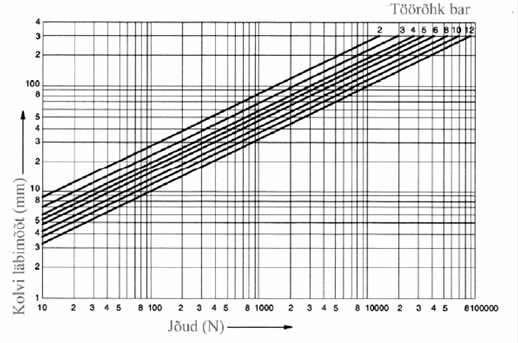
Joonis 4.31. Kolvi poolt arendatava jõu leidmine.
4.1.13. Suruõhumootorid
Erinevalt pöördsilindritest ei ole suruõhumootoritel pöördenurga piirangut. Oma konstruktsioonilt jaotatakse suruõhumootorid järgnevalt:
- kolbmootorid,
- tiivikmootorid,
- hammasratasmootorid,
- turbiinid.
Kolbmootorid
Kolbmootoreid jaotatakse radiaal- ja aksiaalkolbmootoriteks. Suruõhuga pannakse liikuma kolvid, millede liikumine muudetakse ülekandemehhanismi abil pöörlevaks liikumiseks. Mootori sujuva töö tagamiseks kasutatakse mitut pneumosilindrit. Selliste mootorite parameetrid on otseses sõltuvuses töörõhust, silindrite arvust, kolvi pindalast jne. Sellist tüüpi suruõhumootorid on kas päripäeva või vastupäeva pöörlemisega. Maksimaalne pöörlemissagedus ulatub kuni 5000min-1 ja võimsus nominaalkoormusel kuni l,5-19kW. (Joonis 4.32)
Joonis 4.32. Aksiaalkolbmootorid.
Tiivikmootorid
Tiivikmootorid on oma ehituselt lihtsa konstruktsiooniga ja kerge kaaluga. Seetõttu on nad leidnud laialdast kasutamist. Oma tööpõhimõttelt on nad sarnased tiivikkompressorile ja on kergesti reverseeritavad. Nende mootorite pöörlemissagedus on 3000-5000min-1 ja arendatav võimsus on 0,1-17kW (Joonis 4.33.)
Joonis 4.33. Tiivikmootor.
Hammasratasmootorid
Seda tüüpi mootorites tekitatakse pöördemoment suruõhu suunamisel vastu hammasratta hambaid Teine hammasratas on kinnitatud mootori teljele. Selliste mootorite maksimaalvõimsus on kuni 44kW, pöörlemissuund on reverseeritav.
Turbiinmootorid
Turbiinmootoreid saab kasutada väikestel võimsustel, kuid nende pöörlemissagedus on suur (näiteks hambapuuridel kuni 500000 p/min-1).
Suruõhumootorite omadused:
- pöörlemissageduse ja pöördemomendi sujuv reguleerimine,
- väikesed mõõtmed,
- ole tundlikud ülekoormusele,
- võimalik kasutada tolmustes, niisketes tingimustes, samuti laias
- emperatuuride vahemikus,
- ei ole plahvatusohtlikud,
- uur pöörlemissageduse diapasoon,
- ihtne hooldus,
- ihtne pöörlemissuuna muutmine
TÄITURID – HÜDRAULILISED JUHTIMISKOMONENDID JA TÄITURID
Hüdrojaotite klassifikatsioon
Hüdraulika süsteemides kantakse vedeliku energiat pumbast tarbivate seadmeteni vastava torustiku kaudu. Selleks, et säilitada vajalikke suurusi – jõudu, momenti, liikumiskiirust või pöörlemiskiirust, paigaldatakse torustikule hüdraulilised juhtkomponendid mille ülesanne on reguleerida rõhku ja voolukiirust. Iga jaoti mõjub torustikus takistusena. [21]
Tabel 4.1. Hüdrauliliste jaotite ja täiturite nominaalsuurused.
| Nominaalsuurused | Hüdrauliliste täiturite nominaalsuurusi |
|---|---|
| Nominaalsuurus NW | Nominaalläbimõõt (mm) 4; 6; 10; 16; 20; 22; 25; 30; 32; 40; 50; 52; 63; 82; 100; 102 |
| Nominaalrõhk NP: (töörõhk) | Rõhk (baarides), mille juures hüdroseadmed ja –süsteemid on mõeldud erinevates oludes töötama.Rõhud defineeritud VDMA 24312: 25; 40; 63; 100; 160; 200; 250; 315; 400; 500; 630 |
| Nominaalne vooluhulk QTnT | Töövedeliku hulk (l/min) mis voolab läbi ventiili rõhukaoga Δp = 1 bar(töövedeliku viskoossus 35 mmT2T/s temperatuuril 40 °C) |
| Maksimaalne vooluhulk QTmaxT | Suurim hulk töövedelikku (l/min), mis võrdlemisi suurte rõhukadudega saab läbi ventiili voolata. |
| Viskoossusvahemik | nt. 20 – 230 mmT 2T/s (cSt); |
| Töövedeliku lubatud temperatuurivahemik | nt. 10 – 80 °C; |
Erinevat tüüpi Hüdrauliliste juhtkomponentide vahel tehakse valik vastavalt nende ülesandele hüdraulikakasüsteemis. (Joonis 4.34):
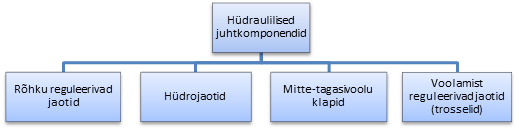
Joonis 4.34. Hüdrojaotite klassifikatsioon.[21]
Hüdrojaotid ja hüdroklapid
Mitte-tagasivooluklapid
Mitte-tagasivooluklappide ülesandeks hüdrosüsteemis on vältida vedeliku voolamist ühes suunas ja võimaldada seda minimaalse takistusega teises suunas (muuta vedeliku voolamine ühesuunaliseks). Mitte-tagasivooluklappides kasutatakse sulgeva elemendina kas kuul-, plaat või tihenditega varustatud koonusklappe (Tabel 4.2).
Tabel 4.2. Mitte-tagasivooluklappide eelised ja puudused.
| Klapi tüüp | Läbilõige | Eelised/Puudused/Kasutusala |
|---|---|---|
| Kuulklapid | 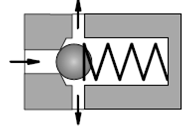 | Lihtne toota; kuulil on kalduvus vedelikuvooluga vibreerima hakata ning müra põhjustada;Kasutatakse mitte-tagasivooluventiilides |
| Koonusklapid | 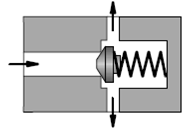 | Valmistamine vajab täpsust ja on keerukam,Head sulgemisomadused;Kasutatakse suunaventiilides |
| Plaatklapid | 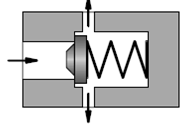 | Kasutatakse väikestel rõhkudel |
Rõhku reguleerivad klapid
Rõhku reguleerivate klappide ülesandeks on hoida ja reguleerida rõhku hüdrosüsteemis ja selle osades.
Rõhuregulaatorid vähendavad väljundrõhku, kui rõhk sisendis on suurem või varieerub. Rõhku tunnetatakse ventiili väljundi järgi.
Allpool on näha erinevate rõhku reguleerivate klappide sümboleid.
| Rõhupiiraja | 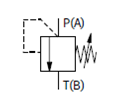 |
| 2-liiteavaga rõhuregulaator | 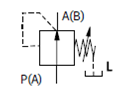 |
| 3-liiteavaga rõhuregulaator | 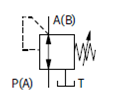 |
Rõhupiirajad hoiavad ja piiravad süsteemirõhku. Rõhku reguleeritakse sisendi (P) järgi. Need on enamasti klapp või siiberventiilide baasil tehtud. Normaalolekus surub survevedru sulgeva elemendi sisendkanalile või surutakse siiber tagasivoolupoolsele kanalile ette.
Rõhuregulaatorid vähendavad sisendrõhu ettemääratud väljundrõhuks. Kontrollrõhku tunnetatakse ventiili väljundist. Neid kasutatakse süsteemides, kus on erinevaid rõhkusid vaja.
Suunda reguleerivad hüdrojaotid
Hüdrojaotid on komponendid, mis muudavad, avavad ja sulgevad hüdrosüsteemides vooluteekondi. Neis kasutatakse täiturite liikumissuuna muutmiseks või peatamiseks.
Hüdrojaotid näidatud DIN ISO 1219 järgi. (Joonis 4.35)
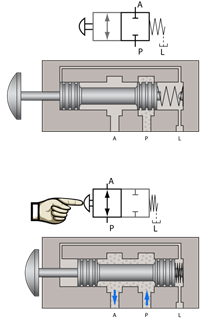
Joonis 4.35. 5.2 ja 2/2-hüdrojaoti tingmärgid ja tööpõhimõte.[21]
Hüdrojaotiteks nimetatakse kõiki neid ventiile, mille abil hüdrosüsteemis toimub hüdroajamite käivitamine ning peatamine.
Hüdrojaoteid on kolme tüüpi:
- siiberjaotid (kolviga)
- klappjaotid
- siiberjaotid (plaadiga, pöördsiibriga)
Hüdrojaoteid liigitatakse veel ka avade arvude järgi (Joonis 4.36), kus esimene arv näitab avade arvu ja teine arv näitab asendite arvu (Tabel 4.3).

Joonis 4.36. Hüdrojaotite klassifikatsioon.
Enim on kasutusel kolviga siiberjaotid, kuna neil on mitmeid eeliseid võrreldes teiste jaotitüüpidega:
lihtne konstruktsioon
hea jõudude tasakaalustus ja seetõttu ka väike võimsustarve juhtimisel
suur tüüritav võimsus
väikesed kaod
palju erinevaid juhtimismoodusi.
Hüdrojaotite esitamisel kehtivad järgmised reeglid:
- Igat erinevat lülitusasendit tähistatakse ruuduga.
- Voolusuundi näitavad nooled.
- Suletud avasid näidatakse horisontaaljoontega.
- Avasid näidatakse vastavalt voolusuunale joonte ja nooltega.
Tabel 4.3. Hüdrojaotite sümbolid
| Igat erinevat lülitusasendit näidatakse ruudu sees | |
| Voolusuundi näitavad kastis olevad nooled | |
| Suletud positsioon | |
| Kaks vooluteekonda | |
| Kaks ava on ühendatud, kaks on suletud | |
| Kolm ava on ühendatud, üks on suletud | |
| Kõik avad on ühendatud |
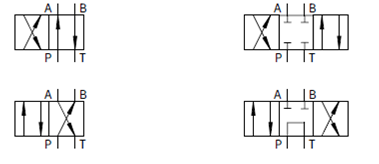
Joonis 4.37. Näide lülituspositsioonidest.
3/2 hüdrojaoti
3/2 hüdrojaotil (Joonis 4.38) on tööport (A), pealevoolu surve port (P) ja tagasivoolu port (T). See juhib töövedeliku järgnevate positsioonide kaudu:
- Tavaolek: P on suletud ning A on avatud T suunas;
- Rakendunud olek: Tagasivool T on suletud, vool on võimaldatud P-st A-sse.
- 3/2 jaoti võib olla ka normaalselt avatud, ehk normaalses olekus oleks vool P-st A-sse.
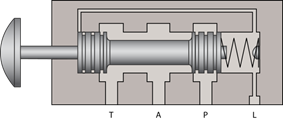
Joonis 4.38. 3/2 hüdrojaoti.
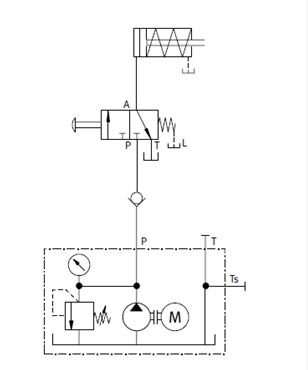
Joonis 4.39. Ühepoolse toimega hüdrosilindri juhtimine.
Hüdraulilised täiturid
Hüdrosilinder muudab hüdraulilise energia mehaaniliseks energiaks. See tekitab lineaarliikumist ja seetõttu nimetatakse seda ka “lineaarsilindriks”.
Põhiliselt eristatakse kahte tüüpi silindreid:
- ühepoolse toimega silindrid
- kahepoolse toimega silindrid
Nende kahte tüüpi silindrite läbilõiked on nähtavad allolevatel joonistel.
Ühepoolse toimega silinder
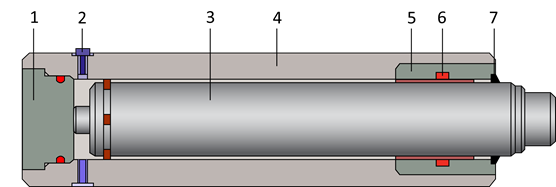
Joonis 4.40. Ühepoolse toimega silinder.
- otsakork
- sisend
- kolb
- korpus
- laager
- tihend
- pühkija
Ühepoolse toimega silindrites (Joonis 4.40) puutub töövedelikuga kokku vaid üks kolvi pooltest. Silinder suudab tööd teha vaid ühes suunas. Need silindrid töötavad vastavalt järgmisele põhimõttele:
Töövedelik voolab ühele poole kolbi. Vastujõu (kolvivarrele mõjuv koormus) tõttu tõuseb silindris rõhk. Kui töövedeliku rõhust tulenev jõud kolvipindalale ületab vastujõu, siis hakkab kolb silindris liikuma ning kolvivars väljub silindrist.
Tagasi liikumisel lülitatakse silindri sisend suunaventiili abil tagasivooluga paaki ning pealevool suletakse.
Kolvi tagasi liikumist mõjutab sellele mõjuv koormus vedru või välise koormuse raskuse näol. Kui need jõud ületavad torustiku ja klappide takistuse, hakkab töövedelik silindrist väljuma ning kolb tagastub.
Kahepoolse toimega silinder
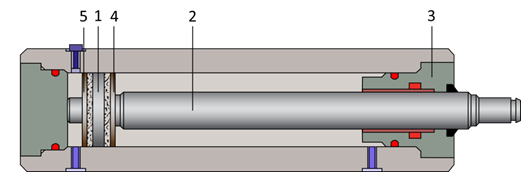
Joonis 4.41. Kahepoolse toimega silinder.
1 kolb
2 kolvivars
3 laager
4 tihend
5 tihendikate
Kahepoolse toimega silindrite (Joonis 4.41) korral on võimalik kolbi töövedelikuga mõjutada mõlemalt poolt, seega on võimalik mõlemas suunas tööd teha. Need silindrid töötavad vastavalt järgmisele põhimõttele: Töövedelik voolab ühele poole kolbi ja avaldab kolvi pindalale survet. Sisemised ja välimised takistused võimaldavad rõhul tõusta. Järgneva seaduse järgi:
F = p * A, saavutatakse jõud F rõhu p ning kolvipindala A abil.
Lõpuks takistused ületatakse ning kolb hakkab liikuma, põhjustades kolvivarre väljumise. See on võimalik tänu energiamuundumisele hüdraulilisest energiast mehaaniliseks energiaks, mida saab juba tarbiv seade kasutada.
Hüdromootorid
Hüdromootorid muundavad hüdraulilise energia tagasi mehaaniliseks energiaks. Nagu pumpades on ka hüdromootorites kasutusel mitmeid erinevaid tööprintsiipe ja konstruktsioone. Kuna pole olemas sellist mootorit, mis sobiks kõikidesse rakendustesse tuleb igal konkreetsel juhul valida sobiv mootor (Joonis 4.42).
Pöörlemiskiirus
Vaid väga vähesed hüdromootorid on sobivad kasutamiseks juhtudel, kus on vajalik nii väike kui ka suur pöörlemiskiirus (n>1000 min-1). Seetõttu on hüdromootorid jaotatud kahte klassi:
kiired (n = 500 – 10000 min-1) ja
aeglased (n = 0,5 – 1000 min-1).
Pöördemoment
Hüdromootorite pöördemoment sõltub mootori töömahust ja mootorile mõjuvast rõhkude vahest. Väikese pöörlemiskiirusega hüdromootorid on projekteeritud nii, et nad arendavad suurt pöördemomenti ka väikestel pöörlemiskiirustel, näiteks LSHT mootorid (low speed – high torque)
Võimsus
Kuna mootori võimsus on vahetult sõltuv pöörlemiskiirusest, on suurte pöörlemiskiirusega mootorid sobivad seal, kus vajatakse suuri võimsusi. [21]
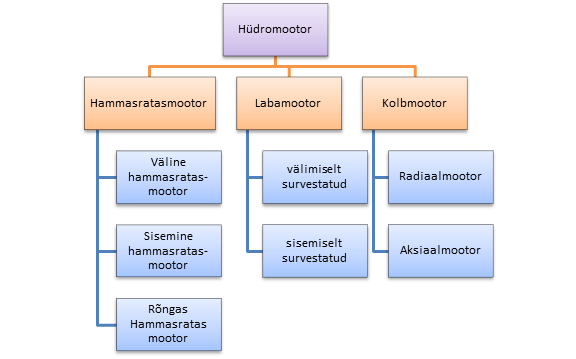

Joonis 4.42. Hüdromootorite klassifikatsioon [21]
TÄITURID – TÖÖSTUSROBOTID
Tööstusroboti mõiste
Standardi EN 775 järgi defineeritakse tööstuslikku robotit (Industrial robot) kui automaatselt juhitavat, ümberprogrammeeritavat, multifunktsionaalset, mitme vabadusastmega manipulaatorit sisaldavad masinat, mis on kas paikselt või mobiilselt installeeritud automatiseeritud tootmissüsteemidesse. Lihtsamalt öeldes on tööstusrobotid eesmärgipäraseks liikumiseks mõeldud masinad, mida kasutatakse tootmise automatiseerimises [22].
Tänapäeva tööstusroboteid iseloomustavad [22]
- programmeeritavus erinevates keeltes ning keskkondades,
- võimalus määratleda positsioone, koordinaatsüsteeme, liikumistrajektoori parameetreid ning korrata tegevust suure täpsusega,
- tööstuskontrollerite võime kontrollida sisendeid ning väljundeid, töödelda informatsiooni, teostada andmesidet teiste seadmetega läbi erinevate andmesidekanalite, koordineerida robotite liikumist teiste seadmetega ning olla integreeritud arvuti- ning tööstussüsteemidesse
Tabel 5.1. Tänapäeva tööstusrobotite tähtsamad tehnilised näitajad [22]
| Näitaja | Arvväärtus |
|---|---|
| Vabadusastmete arv | 3-7 |
| Kiirus [m/s] | ≤ 20 (keskmine 1-5) |
| Korratavuse täpsus [mm] | 0,005…2 |
| Tõstekaal [kg] | 1…1000 |
| Resolutsioon [mm] | 0,001…0,5 |
| Kiirendus [m/s2] | ≤ 10g (keskmine: 3-4g) |
| Keskmine eluiga [a] | 12 |
Robotitehnika on tänapäeval väga kiiresti arenev teadusharu, mis hõlmab endas nii mehhatroonikat, infotehnoloogiat ning elektroonikat. Oma suure tööviljakuse ja kvaliteedi poolest ületavad nad inimeste võimeid, mistõttu rakendatakse neid tänapäeva tootmisliinides aina sagedamini.
Tööstusrobot koosneb erinevatest telgedest, mille ümber robot võib pöörelda, ja neid telgi ühendavatest lülidest (vt. Joonis 5.1). Roboti lüli paneb liikuma mõni täiturmehhanism, tänapäeval on selleks elektrimootorid: kas sammmootorid, harjadeta alalisvoolumootorid, või püsimagnetergutusega sünkroonmootorid. Iga mootor on samuti varustatud mõne seisupiduriga nt elektromagnetilise piduriga, mis rakendub sel juhul, kui mootoritel kaob toide. Tavaliselt +24 V pinge rakendamisel pidur vabastatakse. Liigend võib olla kas pöörlev ehk rotatiivne või sirjooneline ehk translatoorne. Iga lüli tööpiirkond on piiratud kas mehaaniliste pidurite abil või siis tarkvaraliselt. See on vajalik, et robot ei keeraks oma liigendeid tööalast välja. Mootori pöördemomendi vähendamiseks kasutatakse mehaanilisi ülekandeid, mis võimaldavad valida täituriteks väiksemaid mootoreid.
Tööstusrobotid on varustatud paljude anduritega, mis aitavad neil teostada töid eeskätt ohutult ja täpselt. Tööstusrobot suudab tuvastada kokkupõrget mõne takistusega ning sellele koheselt reageerida, tuvastab ülekiirust või tegeliku positsiooni lahknevust soovitud positsioonist, tunneb ära valesti ette antud parameetreid, katkestab roboti liikumise ohutusahela avanemisel ja palju muud. Lisaks sisseehitatud kaitsefunktsioonidele on võimalik robotsüsteem varustada ka muude kaitseanduritega näiteks tuvastusanduriga, mis tuvastades inimese kohalolu edastab robotile info töö katkestamiseks.
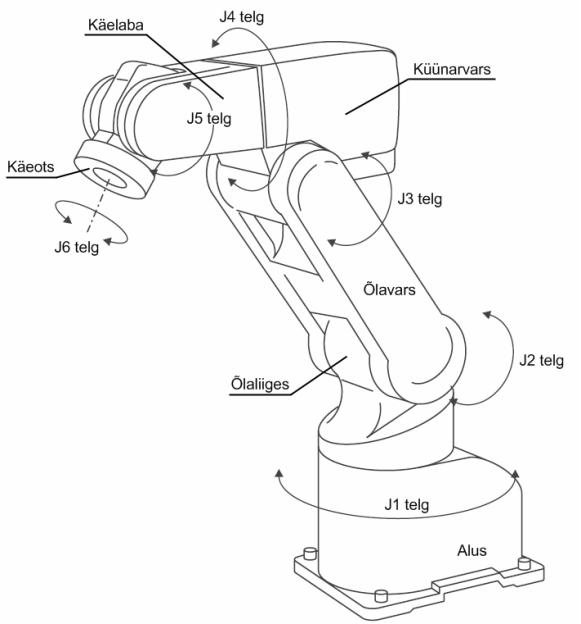
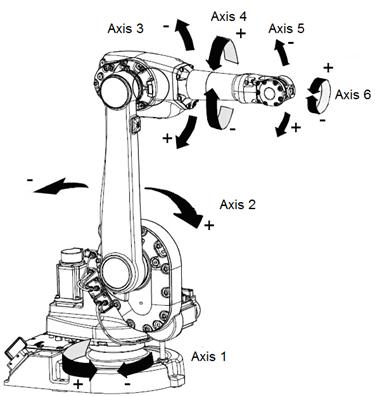
Joonis 5.1. MELFA RV–1A roboti manipulaator [22]
Robotsüsteem
Robot ei saa kunagi töötada üksinda. Tehnoloogilise operatsiooni teostamiseks on peale robotite vaja veel tehnoloogilisi masinaid ja abiseadmeid. Töödeldav detail tuleb robotile ette anda, edastada info töö alustamiseks ning reageerida protsessi tagasisidele. Seega tuleb igat tootmisüksust vaadelda eraldi robotsüsteemina. Robotsüsteemiks (robot system) nimetatakse automaatselt toimivat tootmismoodulit, mis koosneb omakorda ühest või mitmest manipulaatorist, tehnoloogilisest- ja/ või transpordimasinast ja töödeldavate detailide hoidmiseks ette nähtud kassetist või alusest [22].
Robotsüsteemi plokkskeem on näidatud ning üksikosade kirjeldused järgmistes alapunktides.
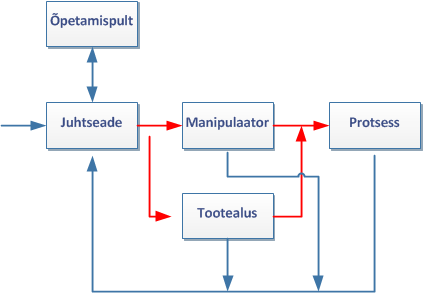 |
Joonis 5.2. Robotsüsteemi ülesehitus
Juhtseade
Juhtseade (controller) on robotsüsteemi osa, mis juhib manipulaatorit ja teisi seadmeid, töötleb erinevatelt anduritelt saadavaid tagasisidesignaale süsteemi oleku kohta ning vahetab andmeid kasutajate ning teiste robotsüsteemidega läbi erinevate andmesideliideste. Juhtseade juhib korraga nii manipulaatorit kui ka tootealust vastavalt programmile ning võib töötada sünkroonselt ka teiste juhtseadmetega. Juhtseade koosneb juhtimis- ja jõuahelatest. Robotsüsteemi juhtimiseks kasutatav juhtseadme funktsioonid on tunduvalt laiemad kui näiteks programmeritavatel kontrolleritel. Firma ABB juhtimisseade IRC5 on näidatud (Joonis 5.3).
 |
Joonis 5.3. Firma ABB juhtseade IRC5
Õpetamispult
Õpetamispult (Teachpendant) on käes hoitav ja kontrolleriga ühenduses olev seade manipulaatori käsitsijuhtimiseks, positsioonimispunktide õpetamiseks, juhtprogrammi kirjutamiseks, programmi testimiseks ning sätete muutmiseks. Õpetamispult on vajalik ka sidustalitluses programmeerimiseks personaalarvutiga. Seega toimub kasutaja ja juhtseadme vaheline kommunikatsioon läbi õpetamispuldi, mille kaudu antakse sisse manipulaatori juhtimiseks vajalikud sisendsuurused.
 Joonis 5.4. Õpetamispult Joonis 5.4. Õpetamispult |
Manipulaator
Manipulaator (manipulator) on mitmelülilisest mehhanismist, mootoritest ja ülekandemehhanismidest koosnev agregaat. Manipulaator on võimeline pöörama ennast ruumis ümber mitmete telgede ning võtta sisse erinevaid asendeid. Mida rohkem on robotil neid telgi (vabadusastmeid), seda paindlikum ta on. Igat telge paneb liikuma elektrimootor või mõni muu täiturmehhanism, mida juhitakse juhtseadmega. Iga vabadusaste on varustatud lisaks mootorile ka mehaanilise ülekandemehhanismiga ning tagasisideanduriga, mida on vaja roboti juhtimiseks. Manipulaatori käelaba külge kinnitatakse tööriist.
 Joonis 5.5. Mõned tööstusrobotite näited Joonis 5.5. Mõned tööstusrobotite näited |
Tootealus
Tootealus või positsioneer on robotsüsteemi osa, mis asetab töödeldava detaili manipulaatorile vajalikku asendisse. Positsioneeri pöörlemistelg võib olla robotsüsteemi üheks vabadusastmeks, mida juhitakse juhtseadmega samuti nagu manipulaatori liigendeidki. Tootealust võib juhtida ka mõni teine juhtseade. Sellisel juhul tuleb kahe juhtseadme tööd omavahel sünkroniseerida. (Joonis 5.6)
 Joonis 5.6. Firma ABB positsioneer IRBP 250 D Joonis 5.6. Firma ABB positsioneer IRBP 250 D |
Tööstusrobotite juhtimine
Kui mootori juhtimine kujutas endast mootori pöörlemiskiiruse ja -suuna reguleerimist, elektriliste täiturite juhtimine aga nende sisse ja väljalülitamist, siis tööstusrobotite juhtimine on palju keerukam. Tööstusrobotite juhtimine toimub kolmemõõtmelises ruumis arvestades samuti ka tööriista orienteerumisega ümber mitme telje. Selle tarvis peab juhtseade üheaegselt juhtima mitut mootorit. Tööstusrobot liigub eelnevalt programmeeritud trajektoori mööda, mille jaoks peab juhtseade eelnevalt trajektoori välja arvutama, sellele vastavalt mootoreid juhtima ning pidevalt kontrollima roboti trajektoori jälgimist. Kui roboti telgedelt saadud tagasisideanduritelt saadud väärtused ei lange kokku juhtseadme poolt väljaarvutatud väärtustega, peatatakse roboti töö.
Robot liigub alati ühest punktist teise. Kahe punkti vaheline liikumine võib olla kas rangelt sirgjooneline või kõverjooneline. Selleks, et jõuda ühest punktist teise, peab juhtseade punktide koordinaate teades välja arvutama vajaliku trajektoori. Trajektoori väljaarvutamisel määratakse ka iga mootori pöörlemiskiirus, et kõik lülid jõuaksid lõpppunkti üheaegselt. Üks võimalik trajektoor ühest punktist teise on näidatud Joonis 5.7, kus kolme liigendiga robot teostab ebakorrapärast kõverliikumist kahe punkti vahel.
Joonis 5.7. Tööstusroboti liikumine trajektoori mööda [22]
Selleks, et tagada roboti sujuv ja täpne liikumine, kasutatakse robotite telgedel absoluut-tagasisideandureid (resolver, absoluutenkooder), mis edastavad juhtseadmele roboti positsiooni, liikumiskiiruse, kiirenduse ja pöörlemissuuna. Ühe roboti juhtimisseadme plokkskeem on toodud Joonis 5.8.
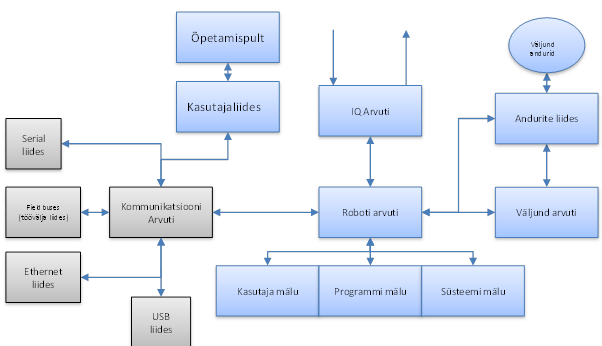
Joonis 5.8. Roboti juhtimissüsteem [22]
Tööstusrobotitel kasutatavad tööriistad
Tööstusrobotid on alati varustatud mõne tööriistaga, mida nad kasutavad ette nähtud töö teostamiseks. Näiteks haaratsiga robot võib teostada teisaldustöid või detaili hoidmis- ja et teandmistöid. Keevituspüstoliga varustatud robot teostab keevitustöid. Tööriistu on väga palju ning nad on projekteeritavad ka erinevate tööde jaoks nt erineva kujuga detailide haaramiseks ei pruugi standardlahenduses olev haarats üldse sobida. Enimlevinud tööriistad on pneumaatiline/elektriline haarats, puur-, frees-, keevitus- või värvimisseade.
 a a |  b b |
 c c |  d d |
| Joonis 5.9. Erinevad roboti tööriistad: a – keevituspüstol, b – kahe pneumaatilise haaratsiga ja videokaameraga multitööriist, c – iminappadega haarats, d – vahetatavate freesipeadega tööriist | |
Tööstusrobotite rakendamine tootmise automatiseerimisel
Tänapäeval on tööstuses suurimaks väljakutseks saavutada kõrge kvaliteet võimalikult madala hinnaga, mistõttu saritootmisega tegelev ettevõtte pole konkurentsivõimeline ilma roboteid kasutamata. Neid kasutatakse selliste tööde teostamiseks tööstuses, mis on inimestele rasked või ohtlikud, nõuavad suurt teostamise täpsust või on inimeste jaoks liiga üksluised. Kõige levinuimaks töödeks on kaar- ja punktkeevitus, värvimine, pakendamine, metallivalu, koostamine, konveieri teenindamine, liimimine ja muud detailitöötlemistööd.
Tööstusroboteid kasutatakse kõige enam keevitustöödes, eriti kaarkeevituses ja punkt-keevitustöödes. Robotkeevitust on kõige enam kasutatud autotööstuses autokerede keevitamisel. Aga lisaks sellele kasutatakse neid nt veemahutite, ukseraamide jm keevitamiseks. Robot, erinevalt inimesest, ei karda inimesele ohtlikke heitgaase, keevituskaare eredust ega keevitusel tekkivaid pritsmeid. Lisaks sellele teostab robot keevitustöid kiiremini ja kvaliteetsemalt kui seda teeb inimene. Kui inimene keevitab, siis läheb keevitamiseks 20-30 % ajast, ülejäänud osa ajast moodustab isikukaitsevahendite (kinnaste, kiivri jm) sättimine.
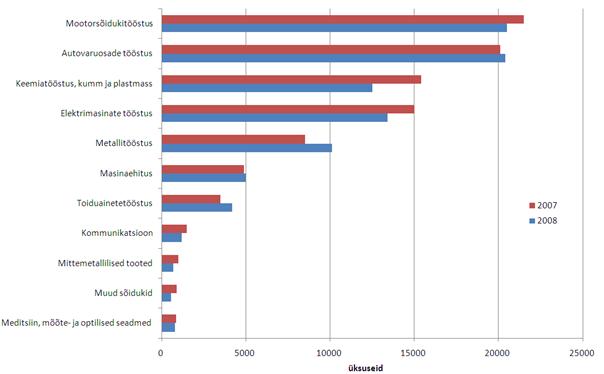
Joonis 5.10. Tööstusrobotite kasutamine maailmas tööstusharude kaupa
Tööstusrobotite klassifikatsioon
Erinevad tööd nõuavad erinevaid tüüpi roboteid, mis erinevad konsktruktsiooni, juhtimise, võimsuse ja muude tehniliste näitajate poolest. Näiteks, et teostada 3 mõõtmelist liikumist nõudvat tööd on mõttekas kasutada kolme vabadusastmega robotit. Juhul kui kasutatakse suurema vabaduastmete arvuga robotit, ei kasutata tema ressurssi optimaalselt ära. Iga vabadusaste tähendab uue liigendi lisamist robotile, mis koosneb mootorist, mehaanilisest ülekandest, tagasisideanduritest ja vajalikest kaablitest. See aga omakorda tõstab roboti hinda ja ekspluatatsioonikulusid.
Tööstusroboteid võib liigitada manipulaatori ehituse järgi, ajamite järgi, juhtimispõhimõtte järgi, tehnoloogilise tegevuse järgi. Tööstusrobotite liigitust manipulaatori ehituse järgi iseloomustab Tabel 5.2.
Tabel 5.2. Manipulaatorite liigitus manipulaatori ehituse järgi
| Roboti tüüp | Kinemaatiline struktuur | Tööala | Illustreeriv näide |
 |  |  |  |
| Karteesianrobot | |||
 |  |  |  |
| Silinderrobot | |||
 |  |  |  |
| Sfääriline robot | |||
 | 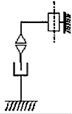 |  |  |
| SCARA robot | |||
 |  |  |  |
| Liigendrobot | |||
 |  |  |  |
| Paralleelrobot |
Tööstusrobotite rakendamine
Järgnevalt on toodud kahe tööstusliku protsessi kirjeldused: alumiiniumvelgede koostamine ja metallivalu, mis peaksid lühidalt kirjeldama tööstusroboti rakendamist tootmisliini ja tema funktsioone seal.
Autode alumiiniumvelgede lihvimine
Süsteem koosneb ühest tööstusrobotist, mis haarab konveierilt tulevat alumiiniumvelge. Spetsiaalse lasermõõteriistadega asetab robot velje fikseeritud asendisse. Seejärel pannakse tööle statsionaarselt paiknevad lihvimismasinad, millega eemaldatakse velje valul tekkinud ebatasasused. Tööstusrobot keerab hoitavat velge lihvimismasinatele vastavalt ette. Pärast töö lõpetamist asetab robot velje tagasi konveierile ning haarab järgmise. Kogu süsteem asub kaitsva tõkke taga.
Süsteemi eeliseks on pidev ja katkematu tootmine, hea kvaliteet roboti suure täpsuse tõttu, väike seadmete kulumine.
Metalli kastmine
Järgnev süsteem kujutab endast metallikastmise (die casting) protsessi. Metallivalu on kõigist teistest protsessidest kõige mustem ja robotit kahjustav, kuna töökeskkond on tavaliselt must ning tekkivad pritsmed tekitavad kahju, kui sattuvad roboti liikuvate osade vahele (mootorite tihendid). Antud juhul haarab tööstusrobot detaili nöörkonveierilt. Haaramiseks on kasutatud pneumaatilist haaratsit ning täpseks positsioneerimiseks kaameraga jälgimissüsteemi. Õigesti positsioneerides kastab robot detaili spetsiaalsesse sulametalliga (nt Zn) vanni, hoiab seda vastavalt ning tõstab välja. Seejärel riputab kastetud detaili tagasi nöörkonveierile.
Süsteemi eelisteks on hea töö kvaliteet ja katkematu tootmine. Roboti kasutamine võimaldab vältida inimese osavõttu antud protsessist, mis toimub inimese jaoks kahjulikus keskkonnas