1. Juhtimistasandi tööstuslikud võrgud
Juhtimistasandi võrgud omavad olulist osa automaatsete juhtimissüsteemide struktuuris. Need esindavad tööstusliku juhtimishierarhia teist kihti ja on lõikumispunktiks kahele kõrvalasuvale tasandile. Sel tasandil viiakse läbi reaalajaline protsesside haldamine ning erinevat tüüpi kontrollerite, personaalarvutite, operaatorjaamade ning programmeerimis- ja diagnostikaseadmete konfigureerimine ja vastastikune andmete vahetamine. Siin toimuv infovoog koosneb peamiselt programmide, parameetrite, andmete ja kontrollerite juhtimisinfo vahetamisest. Eriti lühikeste masinaaegumistega (timeouts) protsesside puhul toimub infovoog tootmisprotsessiga samaaegselt ilma katkestusteta. Limiteeritud operatiivse salvestusega kontrollerite puhul on oluline ühe tootmistsükli ajal laadida alamprogramme, mis omakorda tekitab vajaduse sünkroniseerida tootmine ja infovoog.
Juhtimistasandi kommunikatsioon on intensiivne väikeste ja keskmiste suurustega andmepakettidega side, mis esitab kõrgemad nõudmised täpsusele, müraimmuunsusele ja etteennustatavusele. Need iseloomulikud omadused on tingitud sellest, et suurem osa edastatavatest andmetest on loodud reaalajaliseks protsesside juhtimiseks. Juhtimistasand ühendab sisend/väljund andmevahetusfunktsioonid ja võrdõiguslikud ühendused individuaalsete programmeeritavate kontrollerite, detsentraliseeritud juhtimissüsteemide ning kasutajaliidesena (Human Machine Interface, HMI), möödunud sündmuste arhiividena ja järelvalve teostamiseks kasutatavate arvutite vahel. Sel moel saavutatakse kõrge sidekiirus kõigi seadmetega, mis omavad otsest ligipääsu informatsioonile. Lisaks võimaldavad selle tasandi võrgud mitmete loogikajuhtimise, signaliseerimise ning blokeerimise jaoks tsükliliste ja diskreetsete juhtimisstruktuuride kaasamist. See võimaldab oluliselt vähendada juhtmeühendusi ning sarnase standardi raamides kasutada erinevate tootjate poolt toodetud funktsionaalseid blokke.
Võrgud põhinevad tootja-tarbija kommunikatsioonimehhanismil. See võimaldab võrgukandja efektiivset kasutamist ja võrguliikluse vähendamist, kuna andmed edastatakse ühekordselt ja kõik sõlmed võivad sõnumit kasutada sõltumatult tarbijate arvust. Võrku on võimalik lisada teisi seadmeid ilma võrgu sünkroniseerimist ja andmete, mida edastatakse samaaegselt kõigile punktidele, kahjustamata. Juhtimistasandi võrgud hõlmavad veel järgmisi spetsiifilisi omadusi:
- Võrguside determinism;
- Kõrge kiirusega andmeedastuse võime (5-12 Mb/s);
- Paindlik sisend/väljundandmete juhtimine;
- Lihtsustatud programmeerimine ja automaatne võrgu konfigureerimine;
- Erinevate tootjate poolt toodetud sisend/väljundseadmete ja programmeeritavate kontrollerite kasutamine.
Juhtimistasandi tööstuslikud võrgud leiavad rakendust avatud juhtimissüsteemides, kuna pakuvad paindlikke lahendusi tootmise installeerimise ja töötamise protsessis. Sellistele spetsifikatsioonidele vastavad näiteks ControlNet ja Profibus ning veel sagedamini kasutatav Ethernet/IP.
Tänapäeval kasutatakse juhtimistasandi tööstusvõrkudes mitmeid eri tüüpi võrke, et tagada efektiivne ja usaldusväärne andmevahetus tootmisprotsesside ja juhtimissüsteemide vahel. Siin on mõned kõige levinumad tööstuslikud võrgu tehnoloogiad juhtimistasandi jaoks:
PROFINET
- Kirjeldus: PROFINET on laialdaselt kasutatav Ethernet-põhine tööstuslik võrk, mis on välja töötatud Siemens AG poolt. See võimaldab kiiret ja usaldusväärset reaalajas andmevahetust tootmisliinide ja automaatikaseadmete vahel. PROFINET toetab nii juhtimissignaale kui ka I/O andmete edastamist, samuti turvafunktsioone ja võrgu diagnostikat.
- Rakendused: Kasutatakse laialdaselt erinevates tööstusharudes, sealhulgas autotööstuses, masinaehituses ja protsessitööstuses.
EtherNet/IP
- Kirjeldus: EtherNet/IP (Industrial Protocol) on teine Etherneti-põhine tööstusvõrk, mis võimaldab seadmete vahelist andmevahetust reaalajas. See protokoll kasutab standardset Etherneti tehnoloogiat koos Common Industrial Protocol (CIP) kihiga, pakkudes skaleeritavust ja paindlikkust erinevates automaatikasüsteemides.
- Rakendused: Sobib hästi masin- ja protsessijuhtimises, sealhulgas suuremates tööstuslikes paigaldustes, kus on vaja kiiret andmevahetust ja laiendatud võrgu funktsionaalsust.
Modbus TCP
- Kirjeldus: Modbus TCP on üks vanimaid ja enimkasutatavaid tööstusprotokolle, mis töötab TCP/IP peal. See võimaldab lihtsat ja tõhusat andmevahetust juhtimisseadmete ja kontrollerite vahel. Modbus TCP-d kasutatakse sageli väiksemates süsteemides või seal, kus on vaja ühenduda seadmetega, mis toetavad ainult Modbus-protokolli.
- Rakendused: Laialdaselt kasutatav energiahalduse süsteemides, hooneautomaatikas ja protsessitööstuses.
EtherCAT
- Kirjeldus: EtherCAT (Ethernet for Control Automation Technology) on reaalaja Etherneti-põhine lahendus, mis võimaldab kiiret ja täpset andmevahetust. EtherCAT on tuntud oma madala latentsuse ja kõrge andmeedastuskiiruse poolest, mis muudab selle ideaalseks rakendustes, kus on vaja väga kiiret reaktsiooniaega.
- Rakendused: Kasutatakse laialdaselt masinaehituses, robootikas ja kiiretes automaatikasüsteemides, nagu CNC masinad ja robotid.
CANopen
- Kirjeldus: CANopen on suure jõudlusega tööstuslik võrgu protokoll, mis põhineb CAN (Controller Area Network) tehnoloogial. See on mõeldud kasutamiseks manustatud süsteemides, kus on vaja usaldusväärset ja robustset andmevahetust erinevate juhtimisseadmete vahel.
- Rakendused: Peamiselt kasutatakse auto-, meditsiini- ja transporditööstuses, samuti tööstusautomaatikas, eriti kohtades, kus on vaja kindlat ja tõrgeteta juhtimist.
BACnet/IP
- Kirjeldus: BACnet/IP on hooneautomaatikas laialdaselt kasutatav protokoll, mis võimaldab juhtida ja jälgida hoonete süsteeme, nagu HVAC (kütte-, ventilatsiooni- ja kliimaseadmed), valgustus, turvasüsteemid ja muud automatiseeritud süsteemid. BACnet/IP põhineb IP-võrgu infrastruktuuril ja võimaldab võrgu integreerimist suuremate IT-süsteemidega.
- Rakendused: Peamiselt kasutatakse hooneautomaatikas ja suureskaalalistes hoonete juhtimissüsteemides.
ControlNet
- Kirjeldus: ControlNet on spetsiaalne tööstuslik võrgu protokoll, mida kasutatakse peamiselt Rockwell Automationi seadmetes. See on loodud juhtimissüsteemide jaoks, kus on vaja kiiret ja usaldusväärset andmevahetust, eriti reaalajas protsesside juhtimiseks. ControlNet on osa CIP (Common Industrial Protocol) perekonnast, kuhu kuuluvad ka DeviceNet ja EtherNet/IP.
Erinevad tööstusvõrgud on loodud konkreetsete tööstuslike vajaduste jaoks, alates kiirest andmevahetusest automaatikasüsteemides kuni robustsete ja turvaliste lahendusteni suureskaalalistes paigaldustes. Nende võrkude valik sõltub konkreetsest rakendusest, jõudlusnõuetest ja süsteemi arhitektuurist. Ülaltoodud võrgud on kõik laialdaselt kasutusel tänapäeva tööstusautomaatikas ja juhtimissüsteemides.
Need tehnoloogiad aitavad tagada tõhusa, turvalise ja usaldusväärse andmevahetuse tänapäeva tööstuslikus automatiseerimises.
ControlNet sissejuhatus
ControlNet on osa Common Industrial Protocol (CIP) protokollide perekonnast, mis on loodud tagama usaldusväärset ja deterministlikku andmeedastust tööstuskeskkondades. Protokolli algne versioon ilmus 1990ndatel Rockwell Automationi juhtimisel, kes soovis luua efektiivse lahenduse tööstuslike automaatikasüsteemide ning tootmisliinide juhtimiseks.
ControlNet oli algselt mõeldud konkureerima teiste tööstuslike võrkudega nagu PROFIBUS ja Modbus, pakkudes samal ajal kõrgemat kiirust ja suuremat töökindlust. Aja jooksul on ControlNeti protokolli uuendatud ja täiustatud, et see vastaks tööstuse kasvavatele nõudmistele.
ControlNet’i omadused:
- Reaalajas andmevahetus:
- ControlNet on disainitud pakkuma deterministlikku ja korduvat andmevahetust. See tähendab, et andmete edastamine toimub kindlate ajavahemike järel ja viivitused on väga väikesed ja prognoositavad. See teeb ControlNet’ist ideaalse lahenduse rakenduste jaoks, kus on vajalik kiire ja usaldusväärne juhtimine, näiteks tootmisliinid ja protsessijuhtimissüsteemid.
- Suure jõudlusega andmeside:
- ControlNet võimaldab suurt andmeedastuskiirust ja toetab nii analoog- kui digitaalsignaalide edastamist. See võimaldab mitut tüüpi andmeid, sealhulgas juhtimiskäske, diagnostilist teavet ja I/O andmeid, edastada samas võrgus.
- Kahekordne kaabeldus (Redundancy):
- ControlNet toetab topeltkaabeldust, mis tähendab, et süsteem võib jätkata tööd ka siis, kui üks kaabel katkeb. See tagab kõrge töökindluse ja vähendab seisakute riski.
- Ringtopoloogia:
- ControlNet toetab ringtopoloogiat, mis tagab, et isegi siis, kui üks ühendus kaob, saab andmeedastus jätkuda teise tee kaudu. See on oluline tööstuskeskkondades, kus töökindlus on kriitiline.
- Ühildatavus:
- ControlNet on osa CIP protokolliperekonnast, mis tähendab, et see ühildub teiste CIP-protokollidega, nagu DeviceNet ja EtherNet/IP. See võimaldab lihtsat integreerimist ja laienemist erinevatesse süsteemidesse.
Kasutamine tööstuses:
ControlNet’i kasutatakse laialdaselt erinevates tööstusharudes, sealhulgas:
- Autotööstus: Tootmisliinide ja protsesside juhtimine, kus on vaja täpset ja kiiret andmevahetust.
- Tootmine: Erinevate tootmisüksuste ja seadmete sünkroniseerimine ja juhtimine.
- Energeetika: Elektrivõrkude ja jaotusvõrkude juhtimine, kus on vajalik kõrge töökindlus ja deterministlik andmevahetus.
ControlNet on võimas tööstuslik võrk, mis on loodud tagama kiire ja usaldusväärse andmevahetuse reaalajas rakendustes. Selle deterministlikkus, töökindlus ja CIP-põhine arhitektuur muudavad selle ideaalseks lahenduseks mitmesugustes tööstuslikes rakendustes, kus juhtimiskäsud ja I/O andmed peavad olema täpselt ajastatud ja usaldusväärsed.
Kasutus Tänapäeval
ControlNet on jätkuvalt kasutusel tänapäeva tööstuslikes rakendustes, kuigi see on tihti integreeritud koos teiste võrgu protokollidega nagu EtherNet/IP ja DeviceNet, et tagada laiem ühilduvus ja paindlikkus.
Põhilised kasutusalad tänapäeval:
- Automaatjuhtimissüsteemid: ControlNet-i kasutatakse laialdaselt tootmisliinide ja masinate juhtimisel, kus deterministlik ajastus ja usaldusväärne andmeedastus on kriitilise tähtsusega.
- Energeetika: Elektrijaamades ja jaotusvõrkudes tagab ControlNet usaldusväärse andmeedastuse ja võimaldab reaalajas juhtimist ja monitooringut.
- Nafta ja gaas: Kasutatakse puurtornide, rafineerimistehaste ja muude energiatootmisüksuste juhtimisel, kus on vaja kõrge töökindlusega võrke.
- Toidu ja joogi tootmine: ControlNeti kasutatakse tootmisliinide ja protsesside automaatikas, et tagada toidu ja joogitootmise järjepidevus ja kvaliteet.
ControlNeti laiem kasutus on siiski vähenenud, kuna tööstusautomaatikas on üha enam liikumas Ethernet-põhiste lahenduste poole nagu EtherNet/IP, mis pakub suuremat ribalaiust ja paindlikkust võrreldes traditsiooniliste võrgu protokollidega.
Eelised ja Piirangud
Eelised:
- Determinism ja ajastus: Tagab kindla ajastusega andmeedastuse, mis on oluline reaalajas juhtimissüsteemides.
- Usaldusväärsus: Tugevad veaparandusmehhanismid ja deterministlik andmeedastus tagavad töökindluse ka keerulistes tööstuskeskkondades.
- Skaleeritavus: Võimaldab kuni 99 sõlme ühe segmendi kohta, mis teeb selle hästi skaleeritavaks suuremates süsteemides.
Piirangud:
- Kiirus: Kuigi 5 Mbit/s oli piisav kiirus 1990 ndatel, ei pruugi see tänapäeva suurte andmehulkade ja kiirusnõuetega võrreldes olla piisav.
- Kompleksus: Võrreldes uuemate Ethernet-põhiste lahendustega, võib ControlNet olla keerulisem paigaldada ja hooldada.
Järeldus
ControlNet on jätkuvalt oluline komponent tööstusautomaatikas, pakkudes usaldusväärset ja deterministlikku andmeedastust paljudes kriitilistes rakendustes. Kuigi tänapäeva tööstus liigub üha enam Ethernet-põhiste lahenduste poole, on ControlNet endiselt väärtuslik tehnoloogia, eriti seal, kus determinism ning töökindlus on kriitilise tähtsusega.
Viited
2 ControlNet võrgu spetsifikatsioon
ControlNet on võrk, mis on välja arendatud võrgusidega automaatsete juhtimissüsteemide juhtimistasandi ja kiirete reaalajaliste rakenduste nõudmiste rahuldamiseks. See on avatud sideprotokoll ja üldise tööstusliku protokolli (Common Industrial Protocol, CIP) rakendus, nagu ka DeviceNet. Kuni 2008. aastani hooldas ControlNeti organisatsioon ControlNet International, mis on ControlNet tehnoloogia müüjate, levitajate ja tarbijate assotsiatsioon. 2008. aastast alates võttis selle rolli üle Open DeviceNet Vendors Association (ODVA). Pilt 7.1 esitab ühendust CIP, ControlNet ja OSI mudeli vahel. ControlNet võrk kasutab samaaegse hulgipöörduse (Concurrent Time Domain Multiple Access, CTDMA) meetodit, kus seadmed edastavad andmeid iga võrguintervalli jooksul ja võrguliiklus on rangelt määratud täpsete ajahetkedega.
ControlNeti füüsiline tasand kasutab RG-6 tüüpi koaksiaalkaablit (mille segmendipikkus võib olla kuni 1000;m) ja BNC konnektoreid. Sellisel viisil kasutatakse odavat installatsiooni tehnoloogiat, mille omadusteks on head elektromagnetiline ühilduvus,suur erinevate tootjate tugi ja rakendatava erinevates rakendustes. Optilisi kaableid kasutatakse võrgu segmentide laiendamiseks maksimaalse pikkuseni kuni 30 km ja elektromagnetiliste häirete eest kaitsmiseks. Andmeedastuse kiirus on 5;Mb/s ja andmete kodeerimiseks kasutatakse Manchesteri tüüpi bitte.
Andmepaketid sisaldavad ka 16-bitist lisavälja vigade tuvastamiseks. See spetsifikatsioon säilitab liini niinimetatud kuuma reservi. Kõik seadmed on ühendatud võrku kahe kaabli abil ja kuulavad püsivalt signaali. Seadmed kasutavade seda liini, mis pakub parema kvaliteediga signaali.
ControlNet on sobiv rakendustele, mis nõuavad determinismi, tootlikust, suure andmehulga edastamist, sisend/väljund andmete edastamist suurtel distantsidel ja sünkroniseeritud juhtimist. ControlNet võrkusid kasutatakse näiteks erinevates koordineeritud elektriajamite, liikuvate objektide, suurte andmehulkade, hulga loogikakontrollerite ja kasutajaliidestega protsesside juhtimissüsteemides.
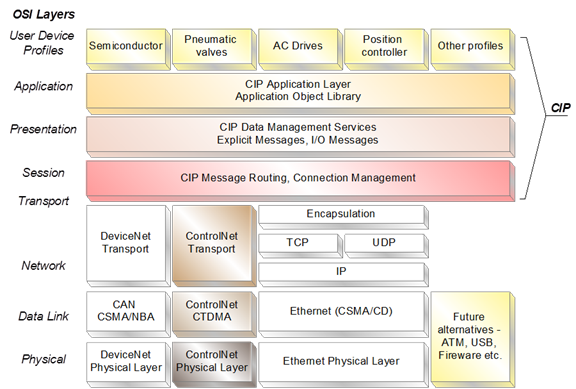
Pilt 7. 1. ControlNet võrgu spetsifikatsioon [64]
3. ControlNet võrkude topoloogia
ControlNet võrgud kasutavad erinevaid topoloogia tüüpe, sealhulgas lineaarne, puu, ring ja nende kombinatsioone. Üldiselt rendib ControlNet magistraalliini, mille külge on ühendatud individuaalsed sõlmed ühe meetri pikkuste väljundliinide (dropline) ja ühendusseadmete abil. Sõlmede aadressid ControlNeti võrgus on vahemikus 0..99. Tavaliselt on kahe sõlme vaheline tegutsemispikkus kuni 1000 m, 48 sõlme puhul on see 250 m kuni 25;km, juhul kui lisatud on repiiterid ja mitmed võrgusegmendid on lingitud.
Pildid 7.2, 7.3 ja 7.4 esitavad mõnda ControlNeti puhul enamkasutatavaid topoloogiaid.
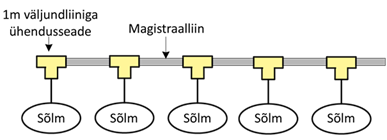
Pilt 7. 2. ControlNet võrkude topoloogia – liin [64]
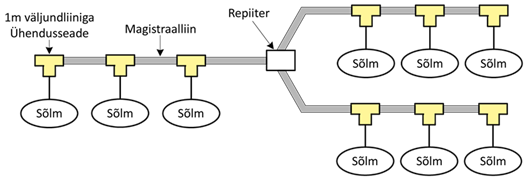
Pilt 7. 3.ControlNet võrkude topoloogia – täht [64]
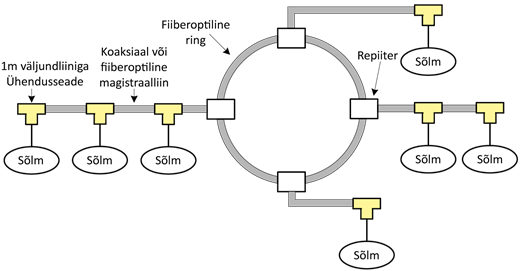
Pilt 7. 4. ControlNet võrkude topoloogia – ring [64]
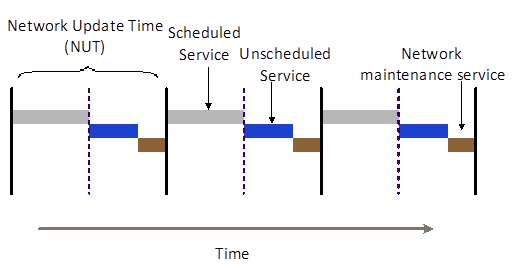
Kanalikihis kasutab ControlNet CTDMA meetodid, kus absoluutne aeg on jagatud korduvateks intervallideks – võrgu värskendamisajaks (Network Update Time, NUT) (pilt 7.5). Võrgu värskendamisaja (NUT) pikkus on võimalik seadistada vahemikus 2 ms kuni 100 ms. Igas NUTis on aeg jagatud kolmeks intervalliks:
Plaaniline (scheduled) – täidab kriitilised aegsõnumeid (planeeritud teenus);
Planeerimata (unscheduled) interval – täidab mittekriitilist informatsiooni (planeerimata teenus);
Kaitsevahemik (guardband) – täidab võrgu hooldusteenust.
Pilt 7. 5. ControlNet CTDMA kanalikihid
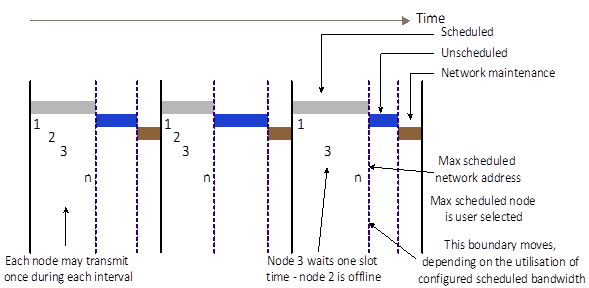
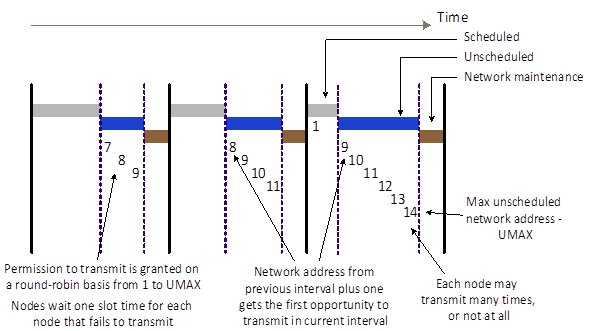
Siinile ligipääs toimub pöördalgoritmi alusel, kus luba edastatakse igas NUT intervallis. Kõik sõlmed sünkroniseeritakse pidevalt, mis võimaldab neil „teada“, millal neil on lubatud ligipääs võrgukandjale oma andmete edastamiseks. Loa rotatsioon töötab ringluse printsiibil liikudes kõige madalamast kõige kõrgema konfigureeritud sõlme aadressini (SMAX, UMAX) ning uue NUT intervalli puhul algab luba rotatsioon otsast peale. Kui mingi sõlm ei saa ligipääsuluba, siis järgmine kõrgema aadressiga (MAC ID) sõlm edastab oma andmed peale ajaintervalli möödumist. Kui puuduv sõlm uuesti aktiveeritakse, sünkroniseeritakse see automaatselt edastusliiniga ilma võrgu funktsionaalsust mõjutamata. Kui mingil sõlmel ei ole andmeid edastamiseks, kannab see üle lühikese kaadri, mis identifitseerib tema tegevusi. Reaalajas andmeid edastavate sõlmede jaoks on ControlNetis planeeritud kindel ajahulk (pilt 7.6). See planeeritud intervall on igas NUT kaadris määratud vastavalt rakenduse nõudmistele. Ülejäänud andmete ülekandeaega kasutatakse mitte-ajakriitilise informatsiooni vahetuseks (pilt 7.7) See planeerimata intervall ei ole reserveeritud individuaalsete sõlmede jaoks, kuid seda kasutatakse vajadusel. Selle intervalli jooksul edastatud andmed ei mõjuta kommunikatsiooni planeeritud intervallis, siiski omab see maksimaalset kohaletoimetamise aega. Enne NUTi lõppu on planeeritud ajaintervall, mida nimetatakse kaitsevahemikuks ja kasutatakse sõlmede sünkroniseerimiseks. Sel ajal saadab kõige madalama aadressiga sõlm kaadri andmetega, mida nimetatakse „moderaatorkaader“ mis sünkroniseerib ülejäänud võrgusõlmed. Selles sõlmes hoitakse spetsiaalset objekti – see on valvurobjekt (keeper object), milles on salvestatud võrgu.
ControlNet on palju kiirem ja võimeline edastama palju suurema andmehulga, kui DeviceNet. Sel eesmärgil kasutatakse ControlNet’is võimsamaid protsessoreid kui DeviceNet’is, mis võimaldavad juurdepääsu suuremale adresseeritavale alale. Seetõttu paljud DeviceNet’ile omased piirangud ei kehti ControlNet’i tüüpi võrkudele.
Pilt 7. 6. ControlNet CTDMA
Pilt 7. 7. ControlNet CTDMA
4. ControlNet võrkude seadmete klassid
- Konkreetsete sõnumite serverid – seadmed, mis vastavad ainult konkreetsetele sõnumitele;
- Sisend/väljundsõnumite serverid – nimetatakse ka adapteriteks. Kui sellised seadmed on loonud sisend/väljundühenduse, on nad võimelised saatma hulga erineva iseloomuga sõnumeid;
- Adapterid konkreetse sõnumi klientidega tuntakse ka kui skännijaid. Need seadmed täidavad sisend/väljund klient/serveri ja konkreetse sõnumi klient/serveri funktsioone.
CIP rakendus ControlNet’is
ControlNet kasutab kõrgemates võrgukihtides CIP funktsionaalsust, võimaldades sellega efektiivsemat seadmetevahelist andmete ülekannet võrreldes mõnede teiste kõrge andmeedastuskiirusega võrkudega. Kommunikatsioonimeetodid on kas võrdõiguslikud või multilevi. Erinevate transpordiklasside kasutamine võimaldab andmepakettide dubleerimise tuvastamist, (vastuvõtu) kinnitamist, samuti sõnumi kontrollimist ja tükeldamist. ControlNet kasutab lisaks CIP standardsetele objektidele kolme lisaobjekti:
- ControlNet Object – sisaldab ühenduse sideparameetreid;
- ControlNet Keeper Object – sisaldab võrgu struktuuri ja konfiguratsiooni informatsiooni;
- ControlNet Scheduling Object – sisaldab ajakriitiliste sõnumite informatsiooni.