1. Tööstuslike tööväljavõrkude struktuur
Tööväljavõrgud paiknevad tööstuslike süsteemide hierarhia kõige madalamal tasemel tootmise juhtimises (pilt 4.1). Nende peamine eesmärk on kanda andmeid terminali tööväljaseadmete (sensorid, ajurite jms) ning kõrgemate hierarhiatasemete seadmete (PLC, töö- ja operaatorjaamad) vahel. Tööväljavõrkusid iseloomustab struktuuri lihtsus, kõrge andmeedastuskiirus, paindlikkus ja sellesse kuuluvate komponentide madal hind. Lisaks hõlbustavad nad olulisel määral võrgusidega automaatsete juhtimissüsteemide diagnoosimist ja häälestamist. Tööväljavõrkude häälestus võimaldab erinevate tootjate seadmete integreerimist.
Kuigi suurem osa omaks võetud tööväljavõrkude spetsifikatsioonidest on algselt arendatud kui ühe ettevõtte toode, on täna automatiseerimisseadmete tootjad ühinenud mitmetes organisatsioonides, mis toetavad ühe või teise töövälja kommunikatsioonistandardit. Selle põhjuseks on fakt, et parem jõudlus ja odavus töövälja kommunikatsioonis kindlustab suurema turuosa. Hoolimata sellest et tööväljavõrgud on avatud näitab praktika, et erinevate tootjate seadmed ei tööta ühes võrgus.
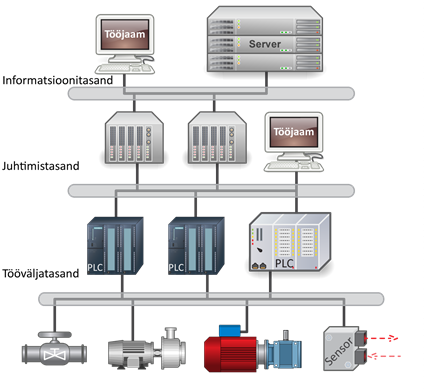
Pilt 4. 1. Tööväljavõrkude struktuur
Tööväljavõrkude seadmete kokkusobivuse määravad nende seadmete omadused, mis on:
- Erinevad diagnostikafunktsioonid;
- Erinevate seadmete sidumine põhikaablitega ja neist eemaldamine, ilma ülejäänud sõlmede vahelist kommunikatsiooni segamata ja elektrivoolu välja lülitamata;
- Automaatne seadmete konfigureerimine ilma spetsialiseeritud seadmeid ja tarkvara kasutamata;
- Seadmete standardiseeritud profiilide kasutamine;
- Seadmete füüsilise võrkuühendamise standardiseeritud mehhanismid;
- Enesediagnoosimise funktsioonid;
- Ettemääratud funktsioonid kriitilise seisundi tuvastamiseks.
Pilt 4.2 esitab valiku tööväljavõrke, vaadates nende rakendamist erinevate tootmistehnoloogiaprotsesside juhtimissüsteemides.
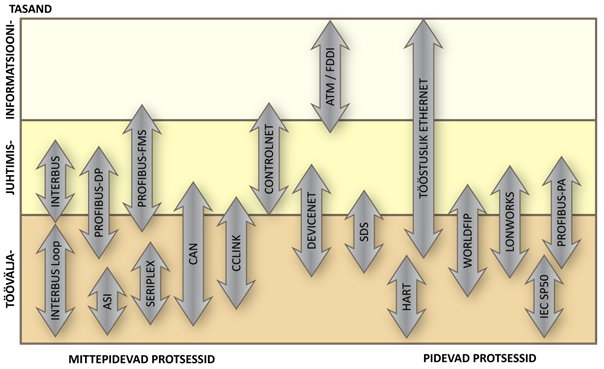
Pilt 4. 2. Tööväljavõrgud [64]
Tööväljavõrkude rakendamisel tuleks järgida järgmisi tingimusi:
- Erinevate tootjate poolt tehtud seadmete kokkusobivus ja vahetatavus;
- Tööväljaterminalid peaksid automaatsetes juhtimissüsteemides toetama kiiret võrgusidet;
- Võimalik kiiresti paigaldada ja häälestada;
- Paindlik komponentide valik;
- Terminalidel on intelligentne enesediagnostika;
- Süsteeme saab paigaldada kuni 1000m füüsilise jaotuse/paigutusega;
- Kaabliga ühendatavate seadmete piiratud arv.
2. Tööväljavõrkude funktsionaalsus
Tööväljavõrgud täidavad võrgusidega automaatsetes juhtimissüsteemides järgmisi funktsioone:
- Andmete edastamine terminalide vahel nagu loogikakontrollerid, täiturid, sensorid jne;
- Seadmete konfiguratsiooni puudutava lisainformatsiooni edastamine.
- Tööväljavõrkude oluline omadus on võimalus ehitada avatud süsteeme, kuna puudub vajadus võrgustruktuuri keskse juhtimise järgi.
Tööväljavõrkudes kasutatud informatsiooni ülekandemeetodid
Tööväljavõrkude ülekandemeetodid võimaldavad edastada informatsiooni ühele või mitmele sõlmele võrgus. Informatsiooni võrgustamise baasüksused on kaadrid, andmepaketid ja datagrammid. Kaader koosneb bittide ja baitidega tööväljadest ja seostatakse OSI mudeli füüsilise kihiga, kusjuures andmepakett seostatakse selle mudeli kõrgemate kihtidega.
Tööväljavõrkude informatsiooni ülekandemeetodid on järgmised:
Üksikedastus (unicast, üks ühele)
Selle meetodi puhul edastatakse andmepakett saatjalt ühele vastuvõtjale (pilt 4.3).
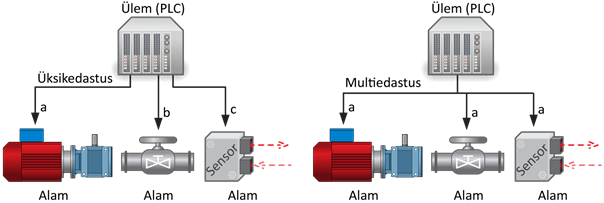
Pilt 4. 3. Tööväljavõrkudes kasutatud informatsiooni ülekandemeetodid
Multiedastus (multicast, üks mitmele)
Multiedastusmeetodi puhul edastatakse andmepakett saatja poolt saajate hostile võrgus. Saatja adresseerib andmepaketi, kasutades saajate multiedastusaadressi, mispeale see saadetakse üle võrgu igale multiedastus-aadressis olevale saajale;
Leviedastus (broadcast, üks kõigile)
Leviedastusmeetodi puhul edastatakse andmepakett kõigile võrgus asuvatele seadmetele. Saatja adresseerib paketi, kasutades leviedastusaadressi, mispeale saadetakse see üle võrgu kõigile seadmetele.
3. Tööväljavõrkudes kasutatavate seadmete klassid
Tööväljavõrkudes jaotatakse seadmed järgmisteks klassidesse:
Ülemseadmed
Ülemseadmed määravad andmevahetusmeetodid võrgus ja täidavad juhtimis- või informatsioonijuhtimisfunktsioone. Need on aktiivsed seadmed, mis saadavad võrgus sõnumeid ilma eelnevate päringuteta, juhul kui neil on autoriseeritud ligipääsumarker antud võrku.
Alluvseadmed
Alluvseadmed on võrgusidega automaatsete juhtimissüsteemide terminalid: töövälja testrid/meetrid, muundurid, täiturid, sisend/väljundmoodulid, mõõtmisseadmed. Need on passiivsed seadmed, millel on piiratud juurdepääs võrku; nad kinnitavad vastu võetud või edastatud sõnumid juhtseadmetelt.
4. Tööväljavõrkude kommunikatsioonimehhanismid
Kommunikatsioonimehhanismid määravad seadmetevahelised loogilised ühendused, kommunikatsiooniprotokolli ja ühendused seadmetes asuvate objektide vahel. Tööväljavõrkudes kasutatakse kõige sagedamini järgmisi kommunikatsioonimehhanisme:
Klient/server
See on kaasaegsetes arvutivõrkudes põhiline kommunikatsioonimudel. Server jagab siin ressursse ja vastab klientide päringutele. Kliendid kasutavad serveri ressursse. Kliendil peaks olema oma ressursid, et käivitada rakendused, mis kasutavad serverilt saadavaid andmeid. Üsna tihti on mõned kliendi ja serveri osad arvutivõrkudes vahetatud, tehes sellega ülemseadmed klientideks samal ajal kui alluvseadmed on võrgus serverid. Ülemseadme funktsiooni saab täita vaid hajusjuhtimissüsteem (DCS), programmeeritav kontroller või personaalarvuti (PC) (pilt 4.4). Alluvseadmed on toorandmete allikad (töövälja testrid, andurid, mõõtmissüsteemid) teistele seadmetele, nagu täiturid, kaugsisend/väljundmoodulite. Kommunikatsioon võrgus algatatakse ülemseadme poolt, mis üritab võtta ühendust ühe või mitme alluvseadmega. Pärast tuvastusprotsessi konfigureerib ülemseade alamseadmed vastavalt neilt saadud informatsioonile nende kasutust arvestades. Töö ajal juhib ülemseade alluvseadmeid ja omab nende üle täielikku kontrolli, kuni otsustab oma ühenduse nendega katkestada.

Pilt 4. 4. Klient/server [64]
Selle mehhanismi oluliseks eeliseks on võrguandmete lihtsustatud käsitlemine; suurem osa andmetest on koondatud ülemseadmesse. Andmete ja kogu võrgu turvasüsteem on samuti lihtsustatud. Selle oluliseks puuduseks on see, et kogu võrgu töövõime võib ülemseadme kahjustuse korral ohtu sattuda.
Võrdõiguslik (peer-to-peer)
Selle kommunikatsioonimehhanismi tüüpiline omadus on see, et kõik võrku ühendatud seadmed on võrdväärsed ja võivad funktsioneerida samaaegselt nii alluvana kui ka ülemana (pilt 4.5). Võrdõiguslikkust kasutatakse identifitseeriva informatsiooni vahetamiseks alluv- ja ülemseadmete vahel ja see leiab rakendust tööstuslikes võrkudes nagu Profibus-FMS, LonWorks, WorldFIP.
Mitmik-ülemseadmed (multi-master)
Seda kommunikatsioonimehhanismi kasutatakse juhul, kui mitu ülemseadet vajavad ligipääsu andmetele, mis asuvad ühel ja samal alluvseadmel (pilt 4.6). Igal suvalisel ajahetkel saab ainult üks ülemseade juhtida ja konfigureerida mitme ülemseadme alluvuses olevaid alluvseadmeid.

Pilt 4. 5. Võrdõiguslik [64]
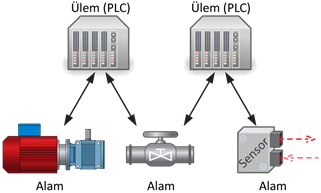
Pilt 4. 6 Mitmik-ülemseadmed [64]
Mitmik-ülemseadmetega mehhanism kasutatakse tööstuslikes võrkudes nagu Profibus-DP, DeviceNet jne.
Pollimine (poll)
Pollimise korral saadab ülemseade päringu igale alluvseadmele eesmärgil vahetada nendega andmeid. Alluvseade annab tingimusteta vastuse. See mehhanism ei ole piisavalt funktsionaalne, kuna teised seadmed ei pääse otse andmetele ligi, kuigi neil on neid vaja.
Impulss, üldlevi (strobe, broadcast)
Impulsi/üldlevi puhul saadab ülemseade päringu kõigile alluvseadmetele eesmärgil vahetada nendega andmeid. Sellele päringule saadavad vastuse ainult need seadmed, mis on üldlevisõnumis määratud.
Otsesõnumid (explicit messages)
Otsesõnumeid kasutatakse võrdõigusliku kommunikatsioonimehhanismi puhul. Seda tüüpi sõnumeid võivad genereerida kõik seadmed võrgus, kusjuures vastuvõtja peab saatma kinnituse. Otsesõnumite mehhanismi rakendatakse võrguseadmete esmasel identifitseerimisel, konfigureerimisel ja diagnostikal.
Killustatud sõnumid (fragmented messages)
Killustatud sõnumite mehhanismi tuleb kasutada juhul, kui tekib vajadus edastada sõnumit, mis on ületab korraga edastatavat andmemahtu. Selle mehhanismi puhul on andmed jagatud fragmentideks, mis hiljem vastuvõtja pool kokku pannakse, moodustades algse sõnumi.
Tsüklilised sõnumid (cyclic messages)
Tsüklilisi sõnumeid kasutatakse perioodiliseks andmete edastamiseks alluvseadmetelt ülemseadmetele. See mehhanism vähendab võrguliiklust ja ülemseadmete tööd.
Olekumuutus (change of state, COS)
Olekumuutuse mehhanismi puhul on alluvseadmed konfigureeritud nii, et nad saadavad andmeid ülemseadmetele ainult siis, kui nende olek/seisund muutub. Ülejäänud ajal kasutavad ülemseadmed viimast alluvseadmelt saadud andmeid protsessijuhtimise eesmärgil, vähendades sel moel olulisel määral võrguliiklust.
Tootja-tarbija (producer-consumer)
Tootja-tarbija mehhanismi puhul kantakse informatsioon perioodiliselt üle võrgu, kasutades üldlevimeetodit, kusjuures iga seade saab ilma viivituseta kätte selle osa informatsioonist, mida ta vajab. Iga seade (informatsiooni algataja) kirjutab andmepaketi päisesse ühenduse ID. Peale seda, kui anmdepakett on saadetud võrku, tuvastab iga seade, mis loeb ühenduse ID, kas see informatsioon on talle mõeldud ja kas ta seda vajab. Paketis on informatsiooni sisu piisav potentsiaalsete vastuvõtjate tuvastamiseks. See mehhanism leiab laialdast kasutust DeviceNet, ControlNet, Fieldbus Foundation spetsifikatsioonides. Tootja-tarbija meetod võimaldab täielikku võrgumeediumi kasutamist ja võrguliikluse vähendamist.
Allikas-sihtpunkt (source-destination)
See mehhanism on alternatiiv tootja-tarbija mehhanismile. Selle puhul saavad alluvseadmed ainult neid andmepakette, mis sisaldavad nende seadmete aadressi. Kui mitu seadet vajavad sama infot, siis tuleb seda edastada mitu korda. Sellised protseduurid on ebaefektiivsed ja võivad põhjustada terve hulga probleeme reaalajalise sünkroniseerimise ja töötamise puhul. Kuna seadmed, mis vajavad identset infot, saavad selle kätte erinevatel ajahetkedel. Allikas-sihtpunkt mehhanismi kasutatakse varasema generatsiooni spetsifikatsioonides nagu Profibus-DP, Modbus Plus ja Interbus S. Kommunikatsioon allika-sihtpunkti mehhanismi puhul on kohmakam kui tootja-tarbija mehhanismi puhul, kuna andmepaketid võrgus sisaldavad lisainfot, mida kasutatakse sõnumi adresseerimiseks ning sama sisuga sõnumeid võidakse saata erinevatele seadmetele.
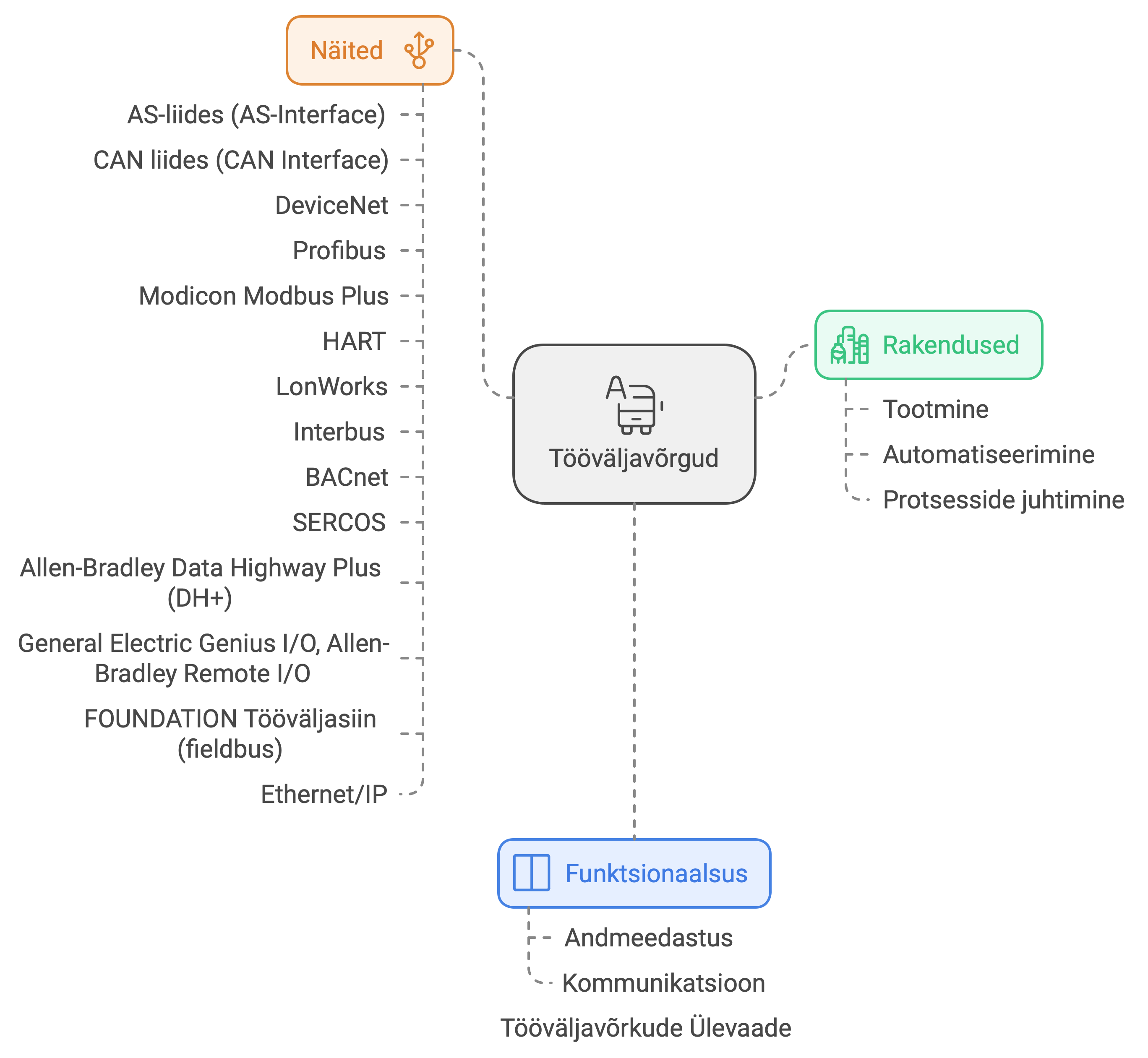
5. Kaasaegsed tööväljavõrgud
Allpool vaadeldavad tööväljavõrgud on vaid murdosa tööstuses kasutatavatest tööväljavõrkudest, mis võimaldavad üles seada kaasaegse võrgusidega automaatse juhtimissüsteemi:
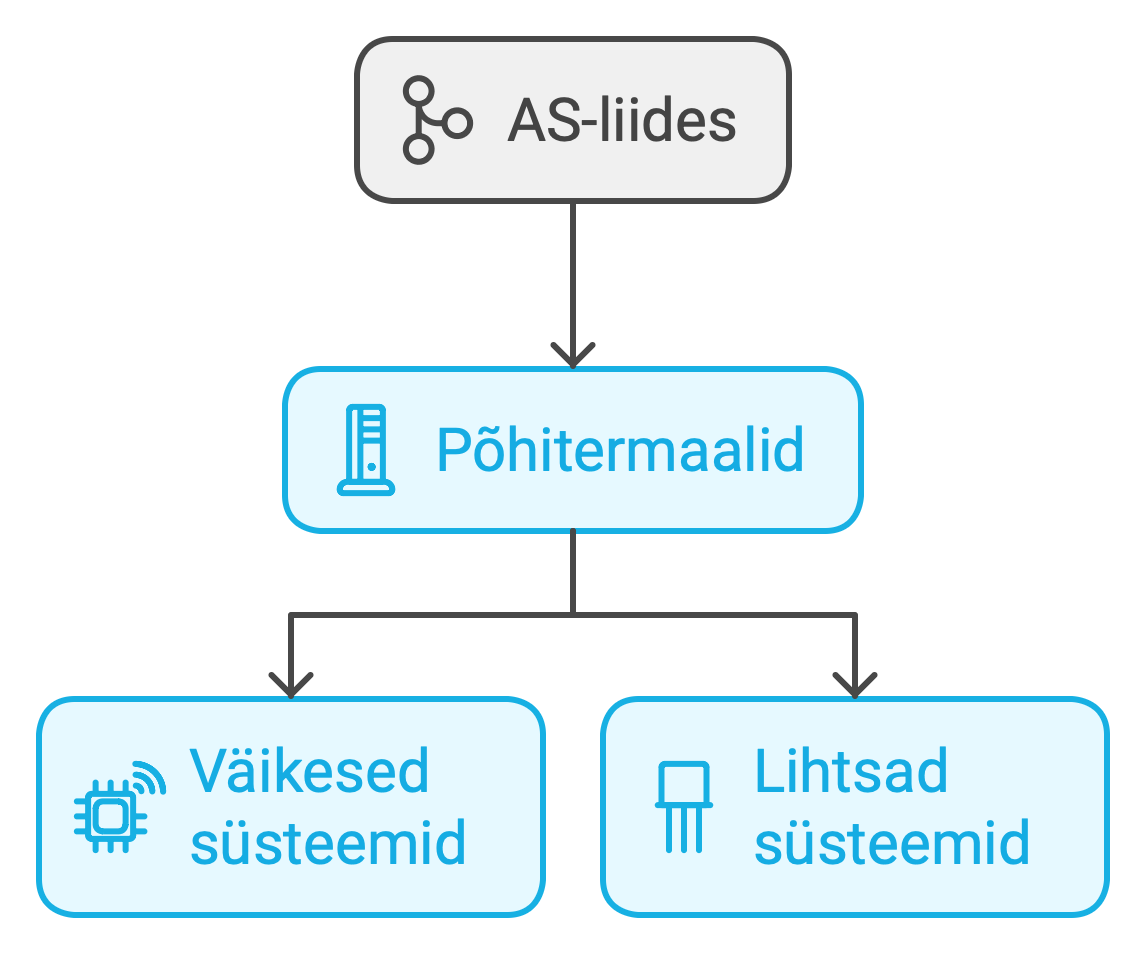
- AS-liides (AS-Interface) on üks kõige lihtsamatest tööväljavõrkudest. Seda kasutatakse elementaarsete sisend/väljundfunktsioonidega terminalide ühendamiseks.
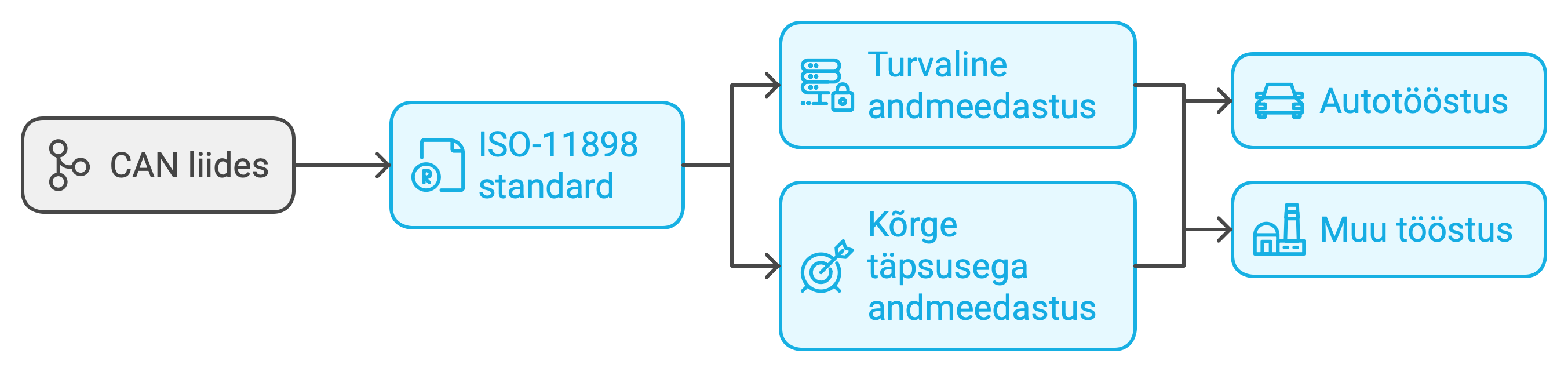
- CAN liides (CAN Interface) – on jadakommunikatsioon tööstuslikes rakendustes, mis põhineb ISO-11898 standardil. Võimaldab turvalist ja kõrge täpsusega andmeedastust;
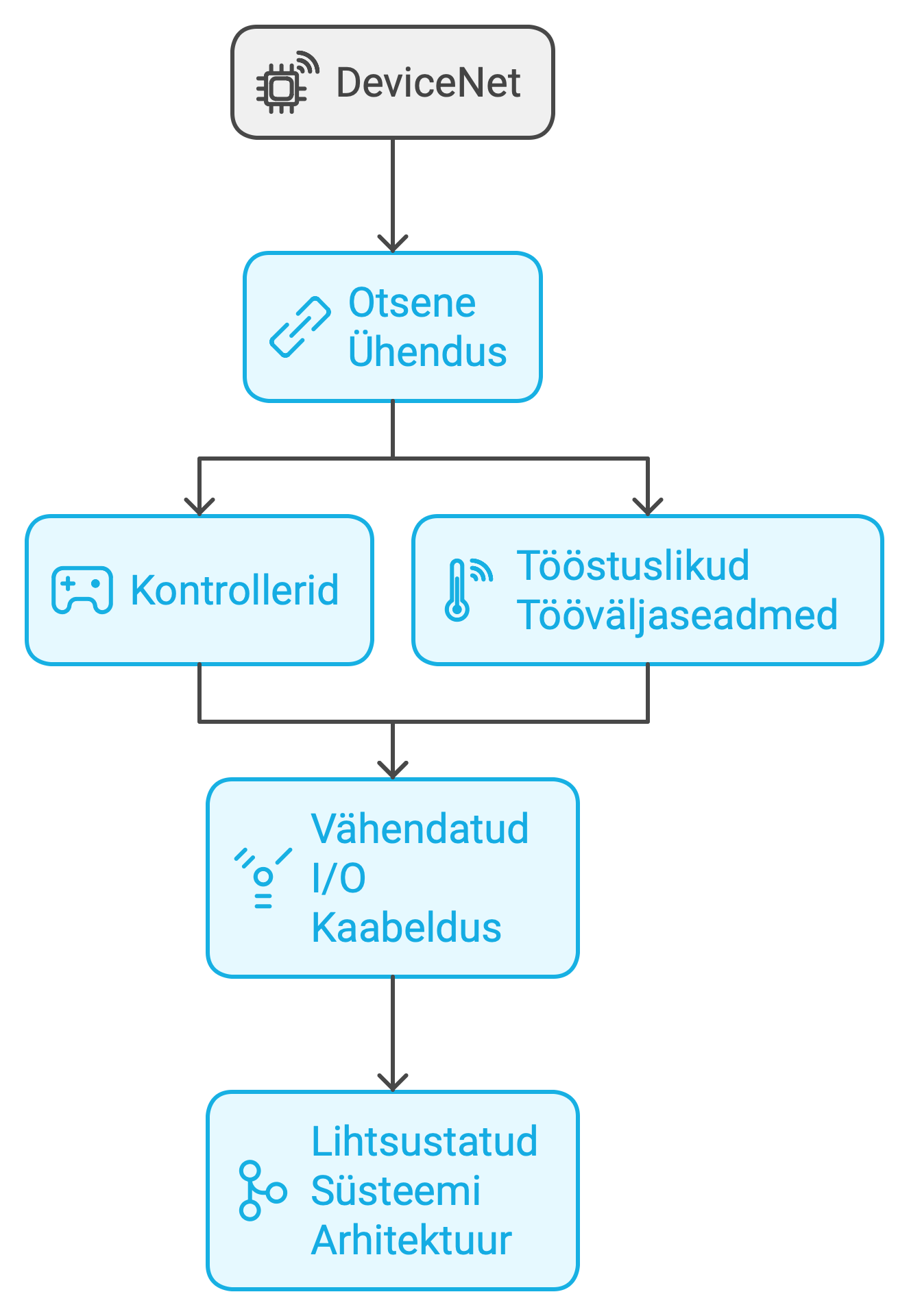
- DeviceNet – majanduslikult efektiivne võrgulahendus, kus kontrollerid ja tööstuslikud tööväljaseadmed on otseühenduses ilma tavapärase madalama taseme sisend- ja väljundkaabelduse vajaduseta.
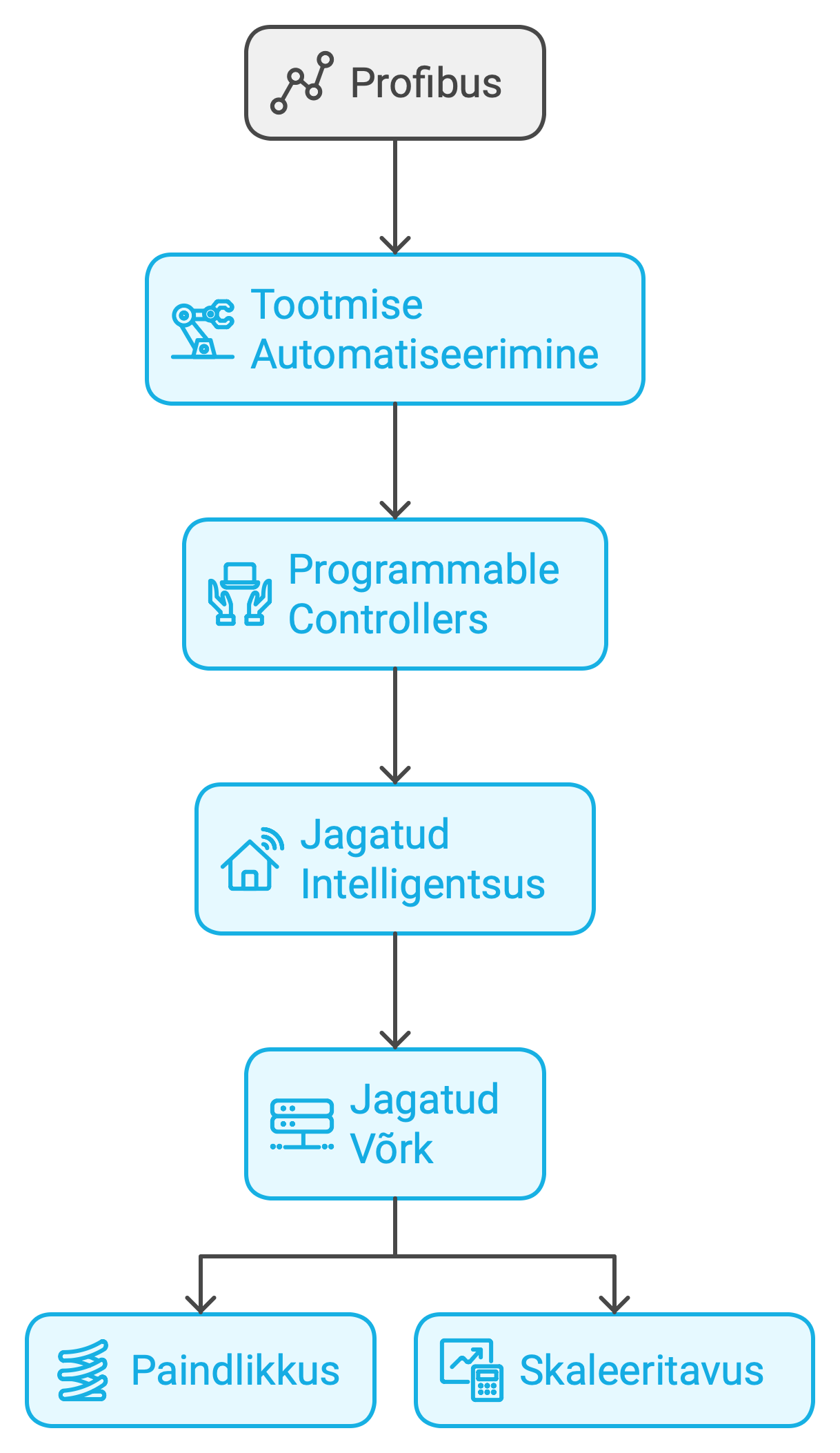
- Profibus – avatud standardil baseeruv tööväljavõrk, mis on laialt rakendatav tootmise automatiseerimises. See võimaldab kasutada programmeeritavate hajutatud intelligentsusega kontrollereid jagatud võrgus;
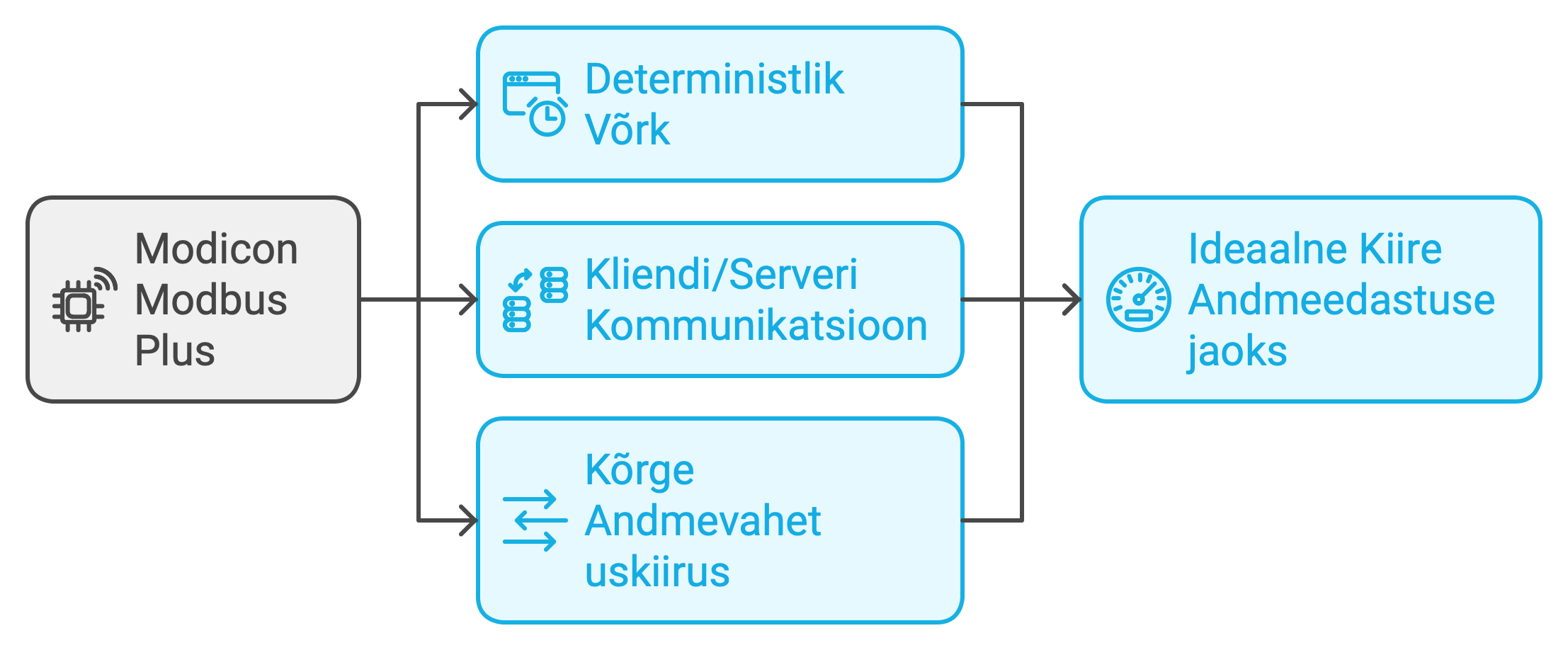
- Modicon Modbus Plus – deterministlik tööväljavõrk klient/server kommunikatsiooniga ja kõrge andmevahetuskiirusega kontrollerite ja terminalide vahel;
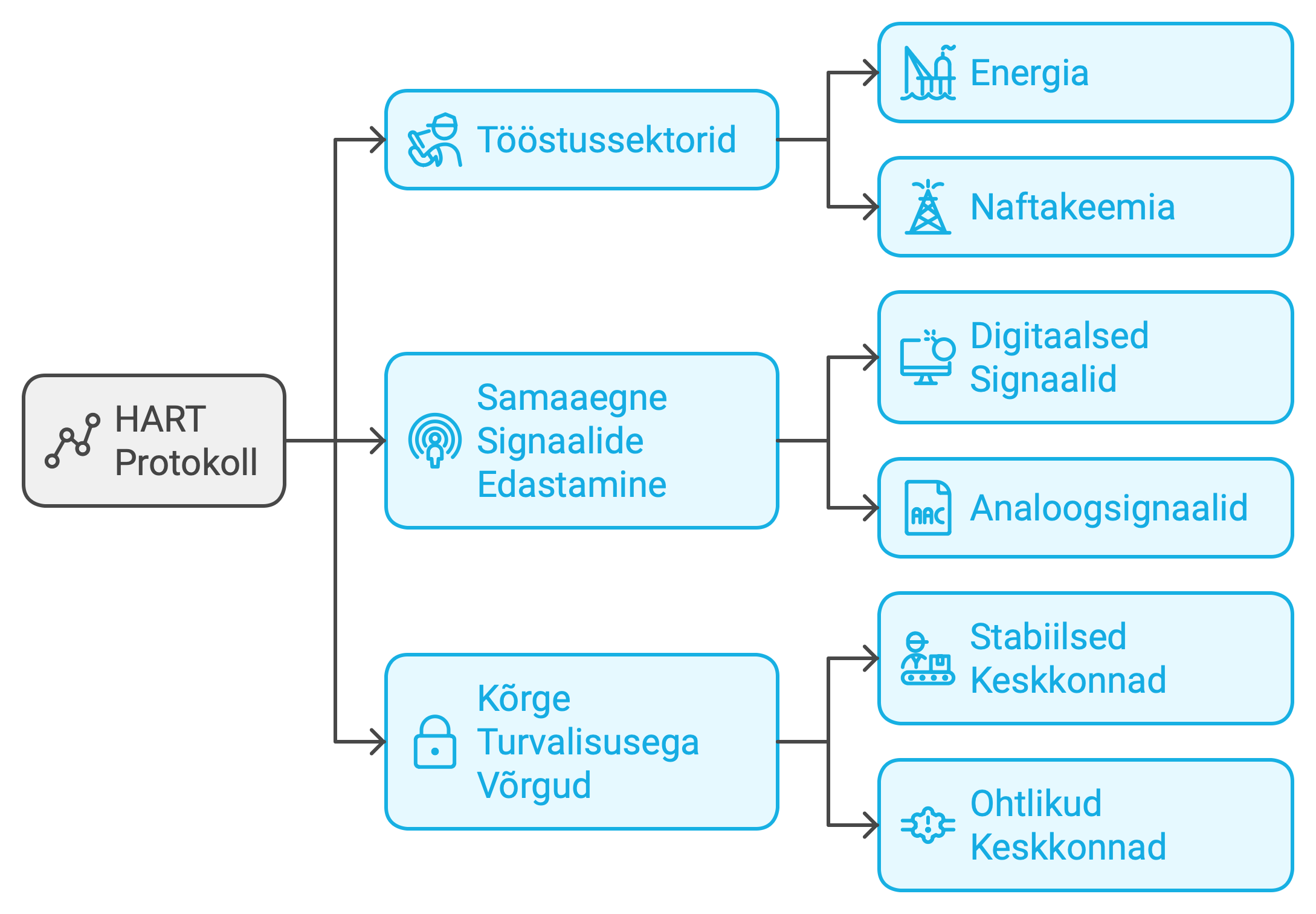
- HART – kõige laialdasemalt kasutatud automatiseerimisvaldkonna tööväljavõrk, mis hõlmab kõiki tööstusalasid, sealhulgas energiatehnika, naftakeemia jne. See võimaldab edastada samaaegselt digitaal- ja analoogsignaale ning kasutada kõrgendatud turvalisusega võrkusid püsimatus ja ohtlikus keskkonnas;
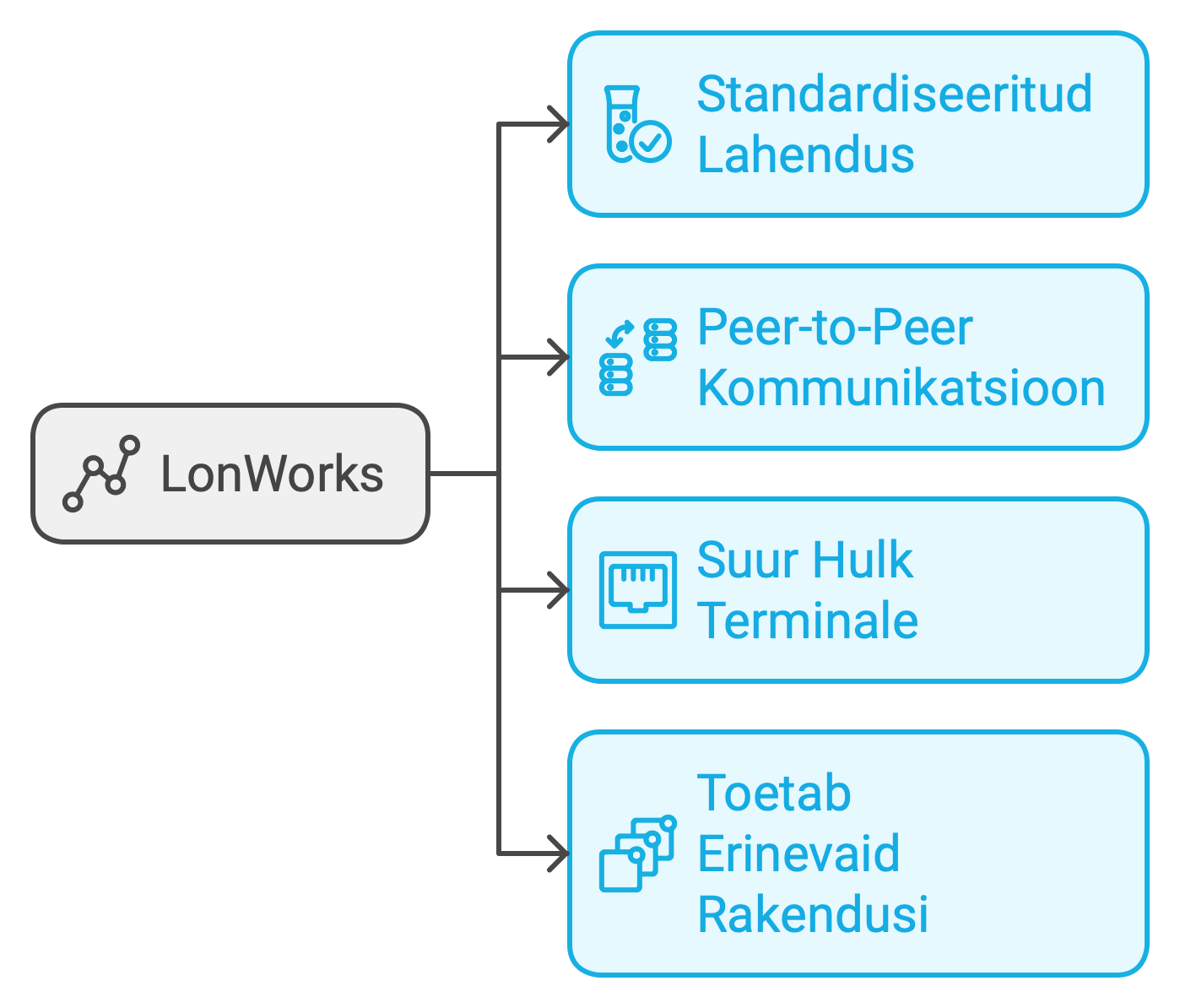
- LonWorks – võrdõigusliku andmevahetusega tööväljavõrk (standardiseeritud), mida kasutatakse suure hulga terminalidega süsteemides;
- Interbus – määratleb ring-topoloogiaga tööväljavõrgud andmete edastamiseks;
- BACnet – kasutatakse peamiselt ehitusautomaatikas;
- SERCOS – tööväljavõrk kiireks andmevahetuseks optilisel kandjal; see on loodud multi-koordineeritud elektriajamite juhtimissüsteemide jaoks;
- Allen-Bradley Data Highway Plus (DH+) – kasutatakse kiire kommunikatsiooniga Allen-Bradley kontrollerite juures;
- General Electric Genius I/O, Allen-Bradley Remote I/O – see on mõeldud eelpool nimetatud tootjate sisend/väljund kaugmoodulite ühendumiseks ülemseadme(te)ga.
- FOUNDATION Tööväljasiin (fieldbus) – spetsiaalselt arendatud kõrge tundlikkusega rakendustele, mis vajavad kõrget turvalisustaset ja kiiret andmeedastust. Sobib tööstuslikuks kasutamiseks ohtlikus keskkonnas, kuna selle põhiomaduseks on täpne sünkronisatsioon juhtimise ja side vahel;
- Ethernet/IP – kõige laialdasemalt kasutatav reaalajaline side tööstuslikes rakendustes. Ethernet/IP on tööstuslik laiend Ethernet TCP/IP-le, mida iseloomustab kiire andmeside.
Tööväljavõrgud ja nende rakendused
Selles dokumendis käsitletakse erinevaid tööväljavõrke (fieldbus), mis on olulised elementaarsete sisend- ja väljundfunktsioonide ning tööstuslike rakenduste jaoks. Tööväljavõrgud võimaldavad seadmete vahelist efektiivset andmeedastust ja kommunikatsiooni, pakkudes lahendusi erinevates tööstusharudes. Allpool on esitatud lühike ülevaade mitmest tuntud tööväljavõrgust ja nende omadustest.
AS-liides (AS-Interface)
AS-liides on üks kõige lihtsamatest tööväljavõrkudest, mida kasutatakse elementaarsete sisend/väljundfunktsioonidega terminalide ühendamiseks. See on ideaalne lahendus väikeste ja lihtsate süsteemide jaoks.
CAN liides (CAN Interface)
CAN liides on jadakommunikatsioon tööstuslikes rakendustes, mis põhineb ISO-11898 standardil. See võimaldab turvalist ja kõrge täpsusega andmeedastust, olles laialdaselt kasutatav autotööstuses ja muudes tööstusharudes.
DeviceNet
DeviceNet on majanduslikult efektiivne võrgulahendus, kus kontrollerid ja tööstuslikud tööväljaseadmed on otseühenduses. See vähendab vajadust tavapärase madalama taseme sisend- ja väljundkaabelduse järele, muutes süsteemide ülesehituse lihtsamaks.
Profibus
Profibus on avatud standardil baseeruv tööväljavõrk, mis on laialdaselt rakendatav tootmise automatiseerimises. See võimaldab kasutada programmeeritavate hajutatud intelligentsusega kontrollereid jagatud võrgus, pakkudes paindlikkust ja skaleeritavust.
Modicon Modbus Plus
Modicon Modbus Plus on deterministlik tööväljavõrk, mis toetab klient/server kommunikatsiooni ja kõrge andmevahetuskiirusega kontrollerite ja terminalide vahel. See on ideaalne lahendus, kus on vajalik kiire ja usaldusväärne andmeedastus.
HART
HART on kõige laialdasemalt kasutatud automatiseerimisvaldkonna tööväljavõrk, mis hõlmab kõiki tööstusalasid, sealhulgas energiatehnika ja naftakeemia. See võimaldab edastada samaaegselt digitaal- ja analoogsignaale ning kasutada kõrgendatud turvalisusega võrkusid püsimatus ja ohtlikus keskkonnas.
LonWorks
LonWorks on võrdõigusliku andmevahetusega tööväljavõrk, mida kasutatakse süsteemides, kus on suur hulk terminale. See on standardiseeritud lahendus, mis toetab erinevaid rakendusi.
Interbus
Interbus määratleb ring-topoloogiaga tööväljavõrgud andmete edastamiseks. See on efektiivne lahendus, mis võimaldab andmete kiiret ja usaldusväärset edastamist.
BACnet
BACnet on peamiselt ehitusautomaatikas kasutatav tööväljavõrk, mis toetab erinevaid seadmeid ja süsteeme, pakkudes integreeritud lahendusi hoonete haldamiseks.
SERCOS
SERCOS on tööväljavõrk, mis on loodud kiireks andmevahetuseks optilisel kandjal. See on mõeldud multi-koordineeritud elektriajamite juhtimissüsteemide jaoks, pakkudes kõrge täpsusega andmeedastust.
Allen-Bradley Data Highway Plus (DH+)
DH+ on tööväljavõrk, mida kasutatakse kiire kommunikatsiooniga Allen-Bradley kontrollerite juures. See võimaldab tõhusat andmeedastust ja seadmete haldamist.
General Electric Genius I/O, Allen-Bradley Remote I/O
Need lahendused on mõeldud eelpool nimetatud tootjate sisend/väljund kaugmoodulite ühendumiseks ülemseadme(te)ga, pakkudes paindlikkust ja efektiivsust.
FOUNDATION Tööväljasiin (fieldbus)
FOUNDATION fieldbus on spetsiaalselt arendatud kõrge tundlikkusega rakendustele, mis vajavad kõrget turvalisustaset ja kiiret andmeedastust. See sobib tööstuslikuks kasutamiseks ohtlikus keskkonnas, kuna selle põhiomaduseks on täpne sünkronisatsioon juhtimise ja side vahel.
Ethernet/IP
Ethernet/IP on kõige laialdasemalt kasutatav reaalajaline side tööstuslikes rakendustes. See on tööstuslik laiend Ethernet TCP/IP-le, mida iseloomustab kiire andmeside, muutes selle populaarseks valikuks paljudes tööstuslikes süsteemides.

Kokkuvõttes on tööväljavõrgud hädavajalikud komponentide vahelise suhtluse ja andmeedastuse tagamiseks erinevates tööstusharudes, pakkudes lahendusi, mis vastavad spetsiifilistele vajadustele ja nõudmistele.